1.はじめに
1バススケジューリングシステムの背景分析
都市交通施設の建設が交通需要の伸びに遅れをとっているため、都市交通状況は日々悪化している。主要な交差点や交通が集中している一部の道路では、交通渋滞はさまざまな程度で発生している。 。問題は都市開発を制限するボトルネックになっています。
都市交通システムは、都市の道路網、車両、管理システムで構成されるオープンで複雑なシステムです。都市交通を解決する方法はたくさんありますが、例えば、現在の数制限対策は良い方法のひとつです。数制限操作により、徒歩でバスに乗る人が増えるので、バスの問題を解決する方法スケジューリングは特に必要です。公共交通機関のスケジューリングシステムの問題を合理的に解決することは複雑な問題であり、人、車両、道路などの複雑な要素を考慮する必要があります。したがって、都市の道路交通問題をより適切に解決するには、ハイテク技術手法を使用する必要があります。今日、インテリジェント輸送システム(ITS)は、この問題を解決するための重要な方法の1つになっています。
運行車両のインテリジェントスケジューリングは、公共交通機関のインテリジェントディスパッチで解決する必要のある典型的な問題の1つです。インテリジェント交通システム(ITS)のコンテキストでは、バススケジュールの作成は都市の公共交通機関のコアコンテンツです。ディスパッチは、公共交通機関のディスパッチの日常的なコマンドです。車両の通常の操作の重要な基盤は、バスのディスパッチャとドライバーの作業の基本的な基盤でもあります。合理的なバススケジュールは、バス会社が車両の利用効率を改善し、運用コストを削減し、乗客の待ち時間を短縮してサービス品質を向上させるのに役立ちます。
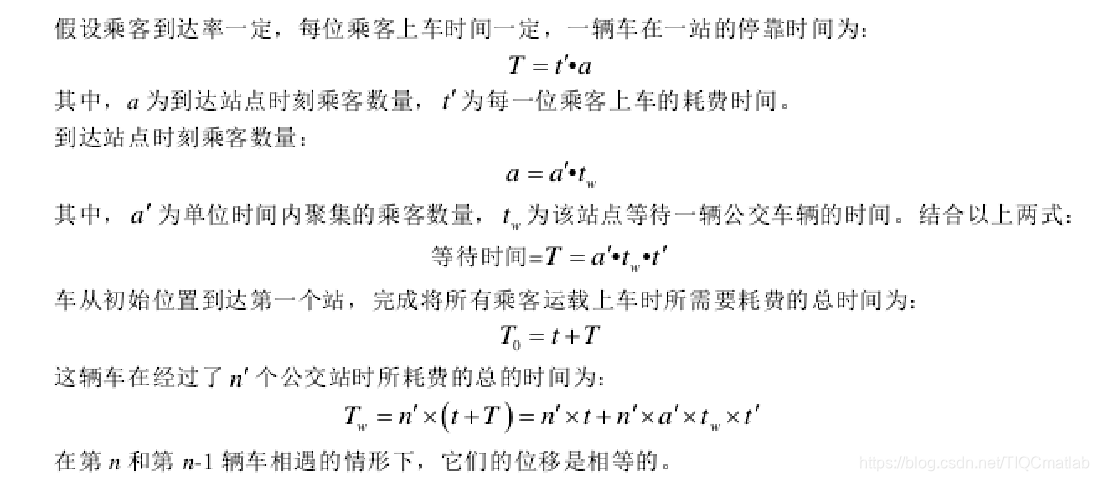
2車両運転モデル

3乗客の乗降モデル
4
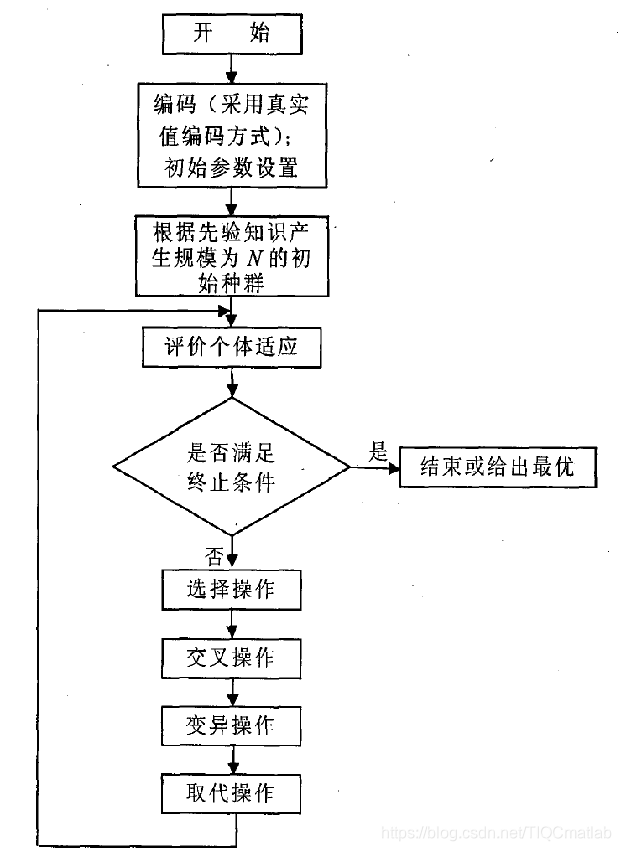
遺伝的アルゴリズムの適用手順遺伝的アルゴリズムGAは、進化と遺伝理論に基づく大域的最適化手法です。
問題を解決するための単純な遺伝的アルゴリズムの基本的な手順は次のとおりです。
(1)初期化:目的関数の実行可能解のセットである初期母集団P(0)としてN個の個体をランダムに生成します。進化代数カウンターをゼロに設定し、最大進化代数iter_maxを設定します。
(2)個別評価:初期母集団を目的関数に代入し、適応度関数に従って現在の母集団の各母集団の適応度を計算します。
(3)終了条件の判断:終了条件が与えられた場合、アルゴリズムが終了条件を満たしているかどうかを判断し、満たす場合は(8)に進みます。
(4)選択操作:初期グループに対して選択操作を実行すると、良い個人がコピーされます。大量に、及び品質の悪い個体はほとんどコピーされていない、あるいは排除される;
(5)クロスオーバー演算:クロスオーバー演算が交叉確率に基づいて行われる;
(6)変異計算:クロスオーバー計算は突然変異確率に基づいて行われる;
(7)グループP (t)選択計算とクロスオーバー計算を行う突然変異演算後、N個の新規個体からなる次世代集団P(t + 1)を取得し、(2)、それ以外は(4)、
(8)に進みます。継続的な進化は、最終的に目的関数、適応を取得します。最高度の個人が問題の最適解または満足のいく解として出力され、計算が終了します。
第二に、ソースコード
% 产生t(i)序列
clc,clear,close all
warning off
Tmin = 1; % 表示相邻车辆间发车间隔的最小值(min)
Tmax = 10; % 表示相邻车辆间发车间隔的最大值(min)
delta = 4; % 表示相邻车辆发车间隔之差的限制值
m = 500; % 表示总的发车次数(车次)
a = randi(10); % t(1)第一个值的取值范围设定为1-10之间随机取值
t(1) = a; % 赋值
maxt = 960; % t(i)的最大值
% Loop
for i=2:m
flag = 1; % 标志变量
while flag == 1
% Tmin< t(i)-t(i-1) < Tmax
a1 = randi(9);
if a1>Tmin+2 && i==2
t(i)=t(i-1)+a1; % Tmin < t(i)-t(i-1) < Tmax
flag = 0; % i 时间点计算完毕
elseif a1>Tmin+2 && i>2 % |t(i+1)-2*t(i)+t(i-1)|<delta
t(i)=t(i-1)+a1; % Tmin < t(i)-t(i-1) < Tmax
if abs( (t(i)-t(i-1)) -(t(i-1)-t(i-2)) )<delta
flag = 0; % i 时间点计算完毕
end
end
end
function flag=test(code)
% code output: 染色体的编码值
global Tmin Tmax delta
x=code; %先解码
flag=1;
for i=3:length(x)
else
flag=0;
end
end
% 产生t(i)序列
function ret=Mutation(pmutation,lenchrom,chrom,sizepop,num,maxgen)
% 本函数完成变异操作
% pcorss input : 变异概率
% lenchrom input : 染色体长度
% chrom input : 染色体群
% sizepop input : 种群规模
% opts input : 变异方法的选择
% pop input : 当前种群的进化代数和最大的进化代数信息
% bound input : 每个个体的上届和下届
% maxgen input :最大迭代次数
% num input : 当前迭代次数
% ret output : 变异后的染色体
function t = pop_meet_conditions(maxt)
global Tmin Tmax delta m tt PP Q cita
% 输入变量说明:
% Tmin = 1; % 表示相邻车辆间发车间隔的最小值(min)
% Tmax = 10; % 表示相邻车辆间发车间隔的最大值(min)
% delta = 4; % 表示相邻车辆发车间隔之差的限制值
% m = 500; % 表示总的发车次数(车次)
% maxt = 960; % t(i)的最大值
% 输出变量说明:
% t为满足条件的个体
a = randi(10); % t(1)第一个值的取值范围设定为1-10之间随机取值
t(1) = a; % 赋值
flag = 1; % 标志变量
% Loop
while flag==1
for i=2:m
flag = 1; % 标志变量
while flag == 1
% Tmin< t(i)-t(i-1) < Tmax
a1 = randi(9);
if a1>Tmin+2 && i==2
t(i)=t(i-1)+a1; % Tmin < t(i)-t(i-1) < Tmax
flag = 0; % i 时间点计算完毕
elseif a1>Tmin+2 && i>2 % |t(i+1)-2*t(i)+t(i-1)|<delta
t(i)=t(i-1)+a1; % Tmin < t(i)-t(i-1) < Tmax
if abs( (t(i)-t(i-1)) -(t(i-1)-t(i-2)) )<delta
flag = 0; % i 时间点计算完毕
end
end
end
end
3、実行中の結果




四、備考
完全なコードまたは記述については、QQ1564658423を追加してください。
過去のレビュー>>>>>>
[ VRP]タイムウィンドウを使用したMatlab遺伝子アルゴリズムベースの車両ルーティング問題[Matlabソースコード002を含む]
[パス計画] 3次元パス計画問題を解決するためのmatlabA *アルゴリズムに基づく[Matlabソースを含むコード003期間]
[パス] Matlabソースコードを使用した人工蜂コロニーMATLABパス計画に基づく計画[004]
[パス] antコロニーmatlab複数の旅行セールスマン問題に基づく計画を解決する[MatlabソースMTSP005を使用]
[パス]計画に基づくantコロニーのmatlabアルゴリズムベースのUAVパスプランニング[Matlabソースコード008を含む]
[パスプランニング]複数のVRP問題を解決するためのMatlab遺伝子アルゴリズム[Matlabソースコード010を含む]
[パスプランニング] Matlab遺伝子アルゴリズムベースの多施設VRPソリューション[MatlabソースコードIssub011を含む]
[パスプランニング] matlab粒子群に基づく3次元UAVパスプランニング[Matlabソースコード015を含む]
[パスプランニング]遺伝子アルゴリズムを使用して複数のロジスティクスでオープン車両ルーティング問題をコンパイルするmatlabに基づくセンター[Matlabソースコード017を含む]
【経路計画】matlab粒子群に基づくロボットグリッド経路計画【Matlabソースコード018を含む】
【経路計画】最短経路を解決するためのMATLABantコロニーアルゴリズムに基づく【Matlabソースコード019を含む】
【経路計画】matlab免疫アルゴリズムに基づくロジスティクスセンターの位置問題[Matlabソースコード020期間を含む]
[経路計画] Matlab人工蜂コロニーベースUAV3次元経路計画[Matlabソースコード021期間を含む]
[経路計画] matalbグリッドマップに基づくロボット最適経路計画-遺伝的アルゴリズム[Matlabソースコード022を含む]
[経路計画] Matlabグリッドマップ-遺伝的アルゴリズムに基づくロボット最適経路計画[Matlabソースコード027期間を含む]
[経路]アリコロニーmatlabマルチUAV攻撃に基づく計画Matlabソースコードを使用したスケジューリング[034]
[path]計画を伴うantコロニーmatlabmatlabソースに基づく3次元パス計画[043]
[path]粒子matlabコロニー最適化に基づく計画antコロニー
マルチセンターVRP問題を解決するためのmatlabantコロニーアルゴリズムに基づく最短パスソリューション[Matlabソースコード076を含む]
[パスプランニング]時間ウィンドウで解決するmatlabantコロニーアルゴリズムに基づく[パスプランニング] Multi -センターVRP問題[Matlabソースコード112を含む]
[パスプランニング]時間ウィンドウでマルチセンターVRP問題を解決するためのmatlabアリコロニーアルゴリズムに基づく[Matlabソースコード113を含む]
[パスプランニング] matalbに基づくマルチセンターVRPソリューション遺伝的アルゴリズム[Matlabソースコード114を含む]
[パスプランニング] VRP問題を解決するためのMatlabシミュレーションアニーリング[Matlabソースコード115を含む]
[パスプランニング] Matlabスターベースのラスターパスプランニング[Matlabソースコード116を含む]
[パスプランニング] matlabに基づくクロスファクターを使用した双方向最適化粒子群グリッドマップパス計画[Matlabソースコード117を含む]
[TSP] GUIを使用した巡回セールスマンTSP問題を解決するためのmatlabアリコロニーアルゴリズムに基づく[Matlabソースコード118を含む]
[パス計画]ベースのMatlabアリコロニーアルゴリズムグリッドマップパス計画[Matlabソースコード119を含む]
[TSP問題] matlab微分進化に基づくTSP問題[matlabソースコード131を含む]
[パスプランニング] Matlab遺伝子アルゴリズムベースの巡回セールスマンTSP問題[Matlabソースコード135を含む]
[パスプランニング] Matlabシミュレートされたアニーリングアルゴリズムベースの巡回セールスマンTSP問題[Matlabソースコード136期間を含む]
[パスプランニング] Matlabantコロニーアルゴリズムに基づくスマートカーパスプランニング[Matlabソースコード137期間を含む]
[パスプランニング] Huawei Cup:災害救援におけるUAVの最適な使用[Matlabソースコード138を含む期間]
[パスプランニング] matlabRRTに基づく3次元パスプランニング[Matlabソースコード151を含む]
[パスプランニング] matalb人工ポテンシャルフィールドに基づくUAV形成パスプランニング[Matlab155期間を含む]
[VRP問題] matlab保存に基づくアルゴリズムTWVRP問題の解決[Matlabソースコード156を含む]
[VRP問題] CVRP問題を解決するためのMatlab保存アルゴリズム[Matlabソースコード157を含む]
[VRP問題] VRP問題を解決するためのMatlabタブ検索アルゴリズム[Matlabソースコード158を含む]
[VRP問題】matlabシミュレートアニーリングに基づくCVRP問題の解決[Matlabソースコード159を含む]
[VRP問題] matlab人工魚学校に基づく時間枠でのVRP問題の解決[Matlabソースコード161を含む]
[VRP問題]容量ベースの問題の解決matlab遺伝子アルゴリズムVRP問題[Matlabソースコード162を含む]
[パスプランニング] matlabウルフパックアルゴリズムに基づく3Dパスプランニング[Matlabソースコード167を含む]
[パスプランニング] Matlab人工ポテンシャルフィールドベースUAV3Dパスプランニング[Matlabを含むソースコード168期間】
[経路計画] matlabの改善された差異に基づく3次元多UAV協調軌道計画[Matlabソースコード169を含む]
[経路計画] Matlab人工蜂コロニーベースの多UAV3次元経路計画[Matlabソースコード170を含む]
[経路計画] matlabスズメ検索アルゴリズムに基づくUAVの3D経路計画[Matlabソースコード171を含む]
[経路計画] matlabantコロニーアルゴリズムに基づく3D経路計画[Matlabソースコード179を含む]
[経路計画] Matlab免疫アルゴリズム最短経路計画[Matlabソースコード194を含む]
[巡回セールスマン問題] MATLAB免疫アルゴリズムに基づく巡回セールスマン問題の解決[Matlabソースコード195を含む]