Annuaire d'articles
Suite de l'article précédent : [Rockchip] 1. Décompression et déploiement du progiciel Rockchip Linux SDK
aperçu
Le projet doit personnaliser et modifier les ressources matérielles de la carte de développement rv1109/rv1126, modifier le fichier dts de l'arborescence des périphériques logiciels de manière synchrone, compiler et empaqueter pour générer un nouveau micrologiciel, et graver le nouveau micrologiciel dans la carte de développement pour utiliser la ressource matérielle requise. exigences de mise en œuvre.

Remarque : étant donné que la basse tension est remplacée par la haute tension, il est nécessaire de graver d'abord le fichier du noyau, puis de modifier manuellement le circuit d'alimentation du matériel, sinon la puce sera endommagée.
Exigences personnelles : La communication entre le matériel radar et la carte de développement 1109, y compris l'émission de commandes radar et la réception de données radar, nécessite au moins deux ports série UART, mais la carte de développement n'ouvre pas directement les ports série. Par conséquent, il est nécessaire de remplacer une interface de caméra CIF par un port série, et la tension de la carte de développement et du port IO du radar doit être adaptée.
Modification du fichier noyau
Modification du port série
Son objectif est de protéger la caméra CFI d'origine activée par défaut, puis d'activer le multiplexage du port série.
Autrement dit, le port de la carte de développement était initialement connecté à la caméra, mais il est maintenant modifié pour se connecter au port série

.
- Blindage : Pour le fichier rv1109_SDK\rv1109_new\kernel\arch\arm\boot\dts\rv1126-evb-v10.dtsi, commentez la partie de la caméra :

- Ajouter uart3, uart4 open
Ajouter le contenu suivant dans le fichier dts
&uart3 {
status = "okay";
};
&uart4 {
status = "okay";
};

Parce que correspondant au uart.cc de la démo intégrée, ttySn est le terminal du port série, ttyS4 envoie des signaux de configuration et de contrôle du radar, et ttyS3 est responsable de la réception des signaux radar.
modification de puissance
Selon "RV1126_RV1109_IO_Power Domain Configuration Guide.pdf" : Vccio6 est

toujours modifié de 1v8 à 3v3 dans rv1109_SDK\rv1109_new\kernel\arch\arm\boot\dts\rv1126-evb-v10.dtsi

Le fichier noyau est compilé et généré
Copiez et remplacez le rv1126-evb-v10.dtsi modifié à l'emplacement correspondant sous Linux
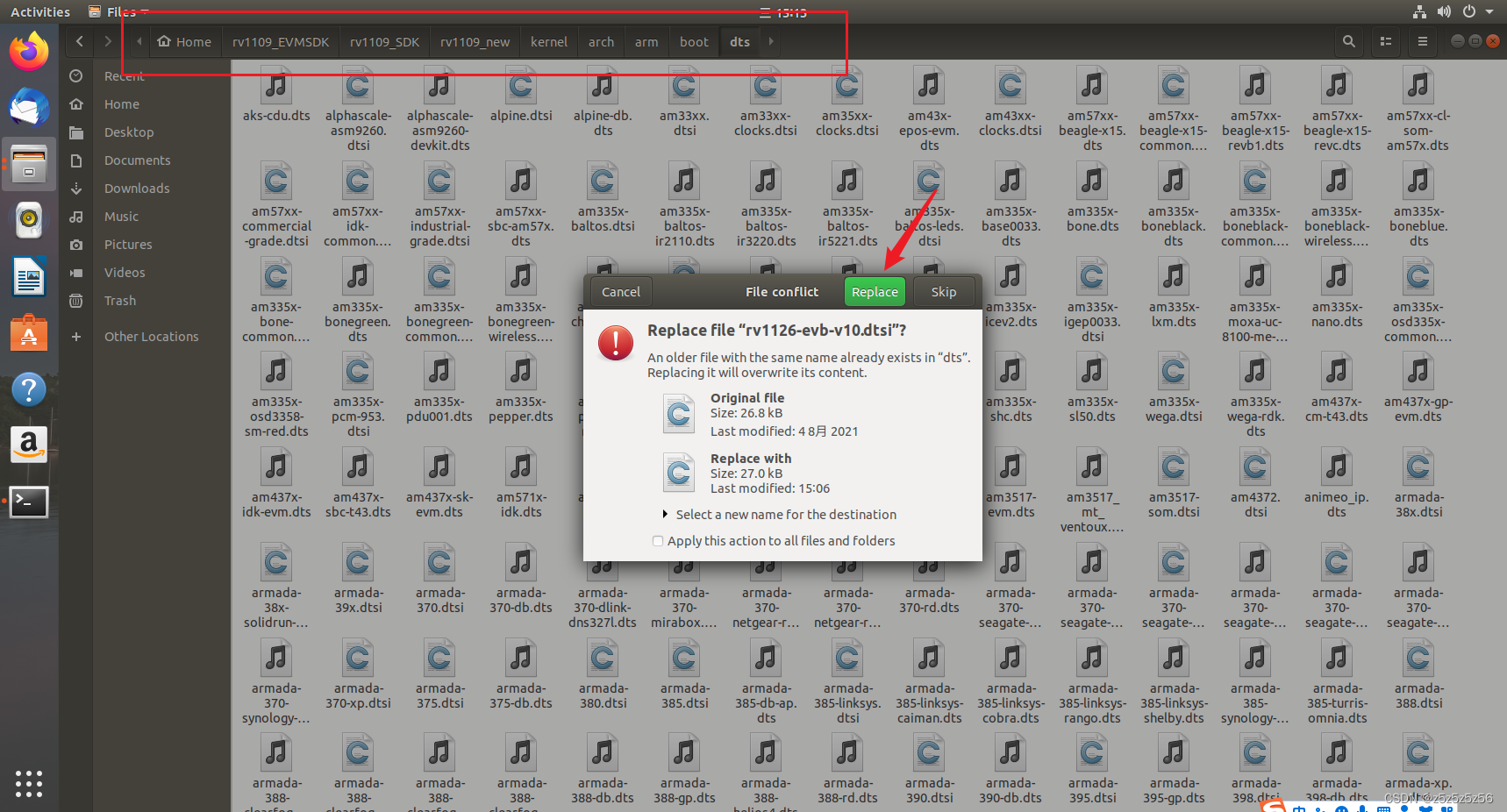
, puis selon "Rockchip_RV1126_RV1109_Quick_Start_Linux_CN.pdf"
Retournez au répertoire racine du SDK et exécutez-le sur le terminal./build.sh kernel
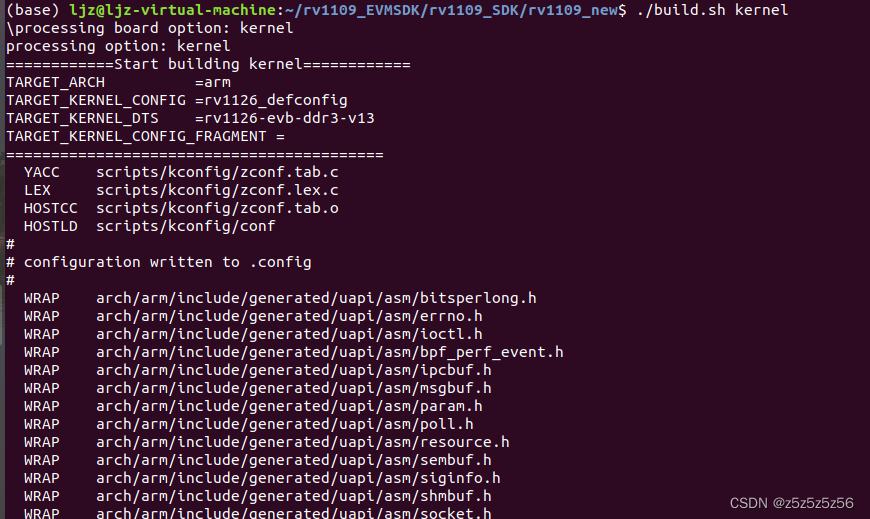
(S'il y a un bug dans la build, assurez-vous d'installer [Rockchip] 1. Décompression du package logiciel Rockchip Linux SDK et de toutes les bibliothèques dépendantes dans le déploiement)
Apparaît après quelques minutes :
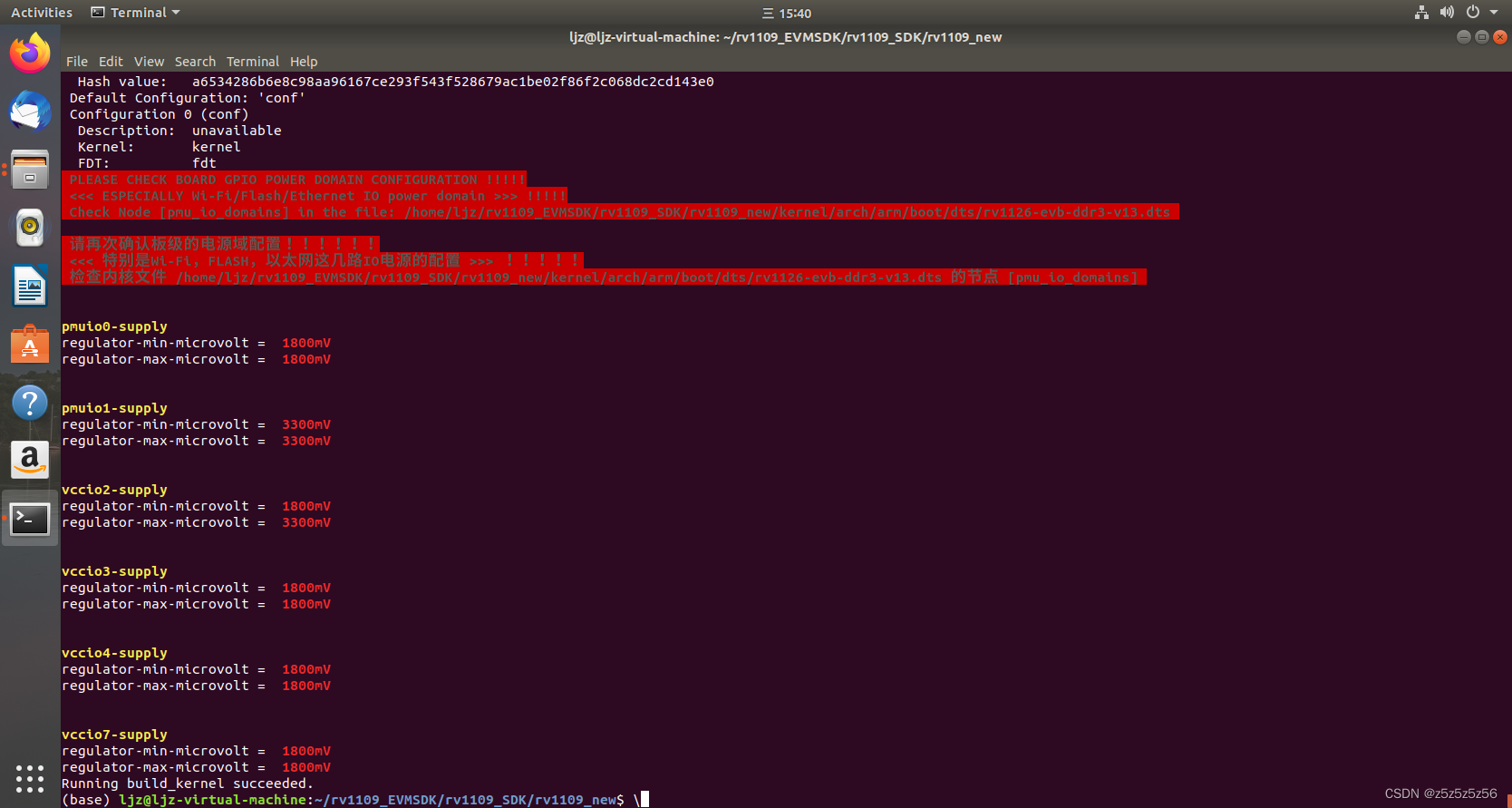
Cela signifie qu'il a été compilé
et doit être empaqueté avant de générer le boot .img
./mkfirmware.sh

et dans le dossier rockdev, le firmware apparaîtra !
Gravez le fichier du noyau sur la carte de développement
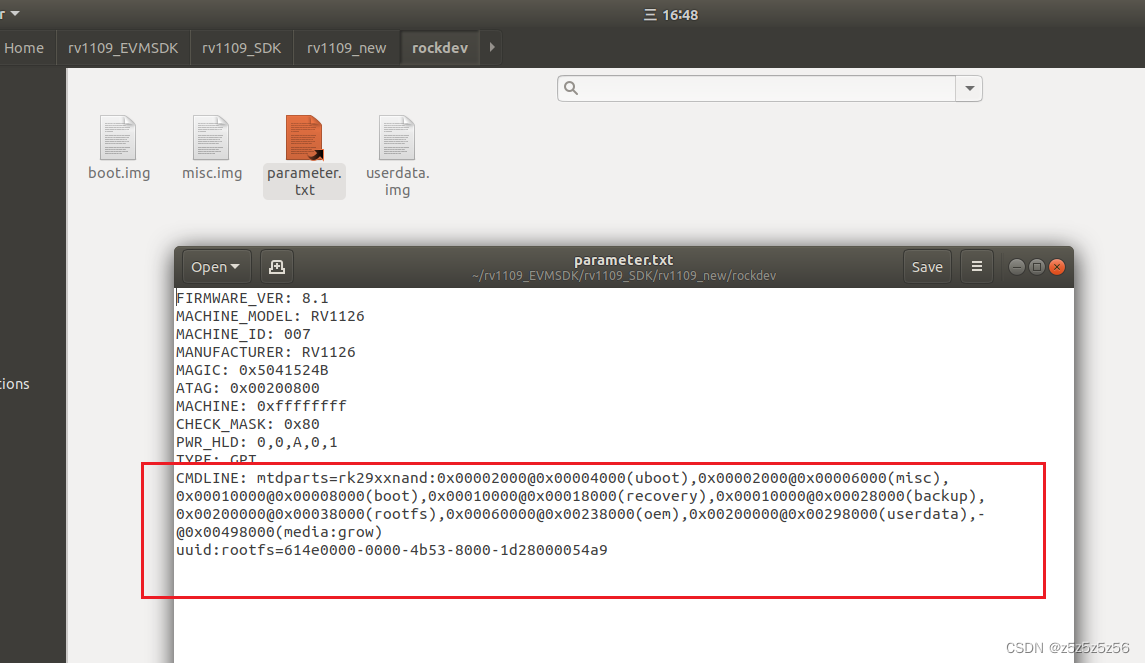
Obtenez le boot.img et les outils du SDK sur Windows via le dossier partagé, ouvrez l'outil de développement Rockchip/RKDevTool.exe,
ouvrez le paramètre.txt généré dans l'image ci-dessus et entrez l'adresse et le nom correspondants dans l'outil
(Pour plus de commodité, vous pouvez cliquer avec le bouton droit pour exporter la configuration après l'avoir saisie une fois, et vous pouvez directement cliquer avec le bouton droit pour importer la configuration la prochaine fois que vous graverez le même firmware) Importez
la configuration correspondant à la carte de développement
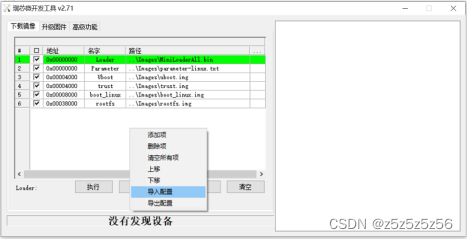
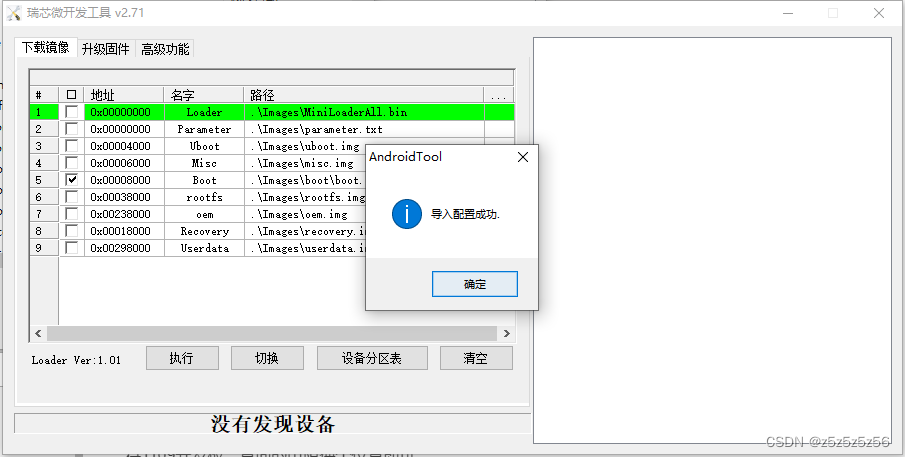
Notez que le chemin derrière est le chemin absolu du fichier de démarrage par rapport à l'exe.
Par exemple, si je mets le firmware à graver
, alors je change le chemin de démarrage
de ce côté. Une fois le travail terminé, il existe deux modes de gravure, deux méthodes, et l'une d'entre elles peut être gravée.
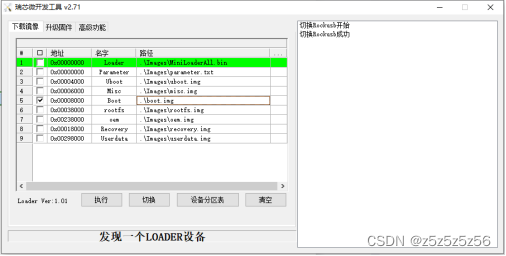
Mode de programmation du chargeur
Une fois la carte de développement connectée à la version 2.7.1 de l'outil (notez que le commutateur doit d'abord être allumé, puis branché sur le port USB après un certain temps), il sera affiché qu'un périphérique ADB a été trouvé. À ce moment, cliquez sur le bouton de commutation, et après environ 2 minutes : le changement d'affichage est réussi, puis importez la
configuration
et après avoir défini correctement le chemin du micrologiciel, cliquez sur Exécuter
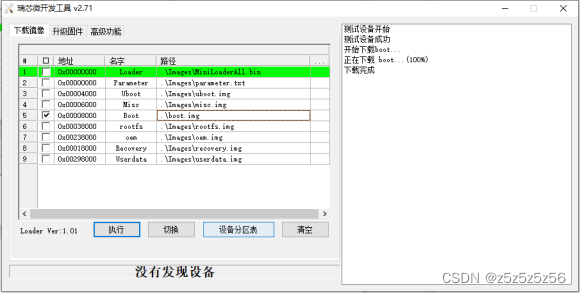
pour le graver.
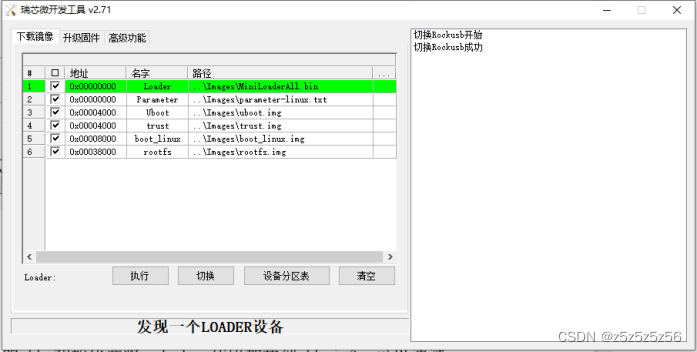
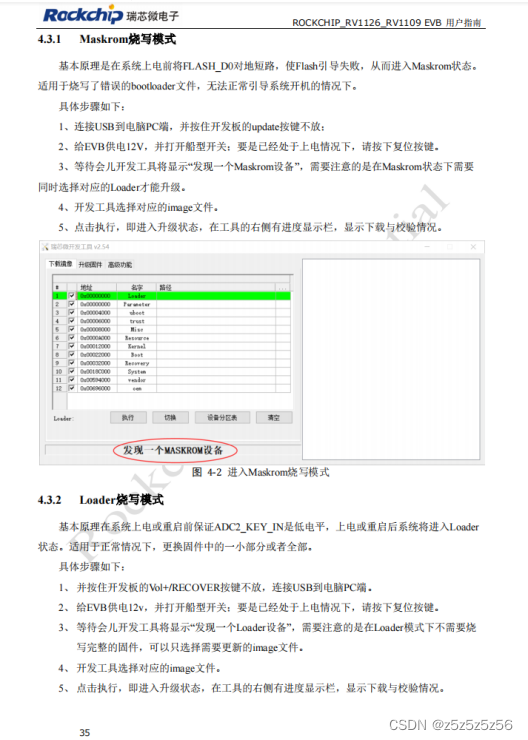
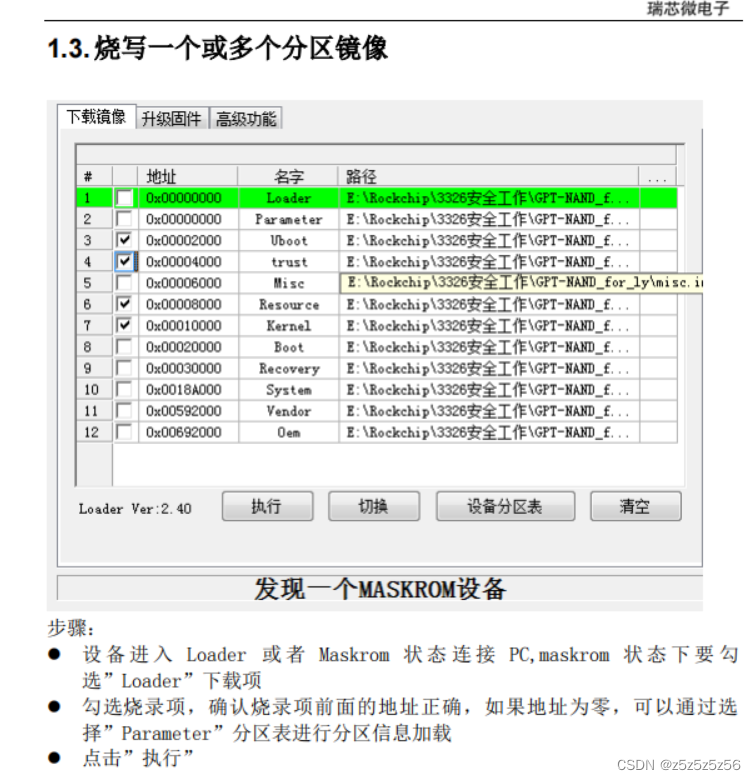
Mode de programmation Maskrom
Une fois la carte de développement connectée à la version 2.7.1 de l'outil (notez que le commutateur doit d'abord être allumé, puis branché sur le port USB après un certain temps), il sera affiché qu'un périphérique ADB a été trouvé. . A ce moment, appuyez sur le bouton de réinitialisation tout en appuyant sur le bouton de mise à jour de la carte de développement. Cliquez, puis relâchez tous les boutons, le logiciel changera pour afficher : Trouvé un périphérique MASKROM Configurez comme ci-dessus, notez que la programmation du mode
Maskrom doit ajoutez un chargeur , sélectionnez également le fichier de chargeur par défaut et le chemin correspondant, puis cliquez sur exécuter, vous pouvez graver.
Lors de l'exécution de cette partie, les étapes sont très compliquées. La version officielle de l'outil de programmation du micrologiciel est différente, et les étapes décrites dans le manuel sont également différentes. J'utilise la version 2.7.1 de l'outil de programmation et cela fonctionne, mais 2.8.4 Cela ne fonctionne souvent pas. Il faut encore le combiner. Les informations réelles sur la carte de développement, essayez-les vous-même.
Ce qui suit est pour référence
"Rockchip_RV1126_RV1109_EVB_User_Guide_V1.0_CN.pdf"
"Manuel des outils de développement Android_v1.2.pdf"
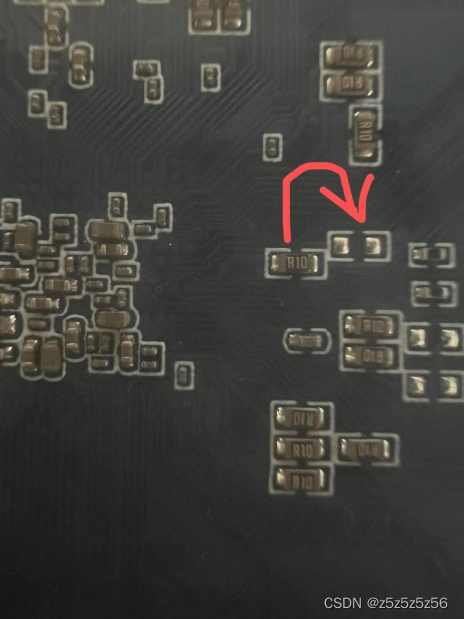
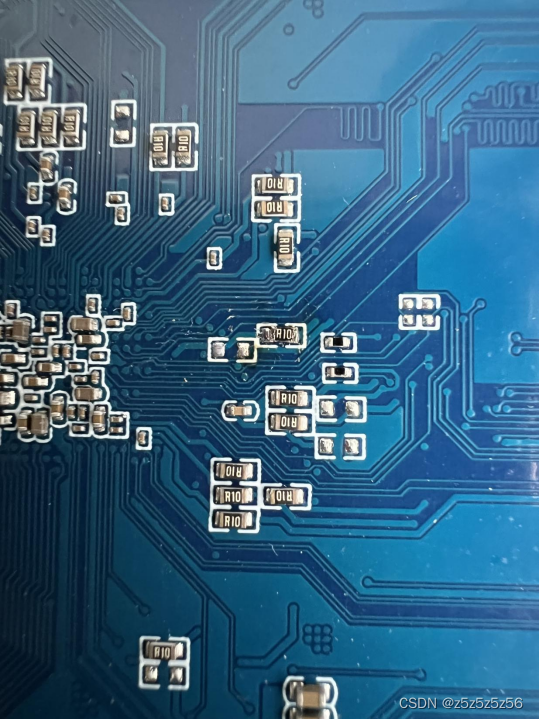
Modification du circuit d'alimentation du matériel
Changez simplement la position de la résistance à l'arrière de la carte de développement 1109.
Une fois le micrologiciel logiciel et le circuit matériel modifiés, vous pouvez essayer d'écrire une démo côté Linux, puis la compiler et l'exécuter sur la carte de développement ! voir
la fin suivante