Table des matières
1. La relation de position relative des segments de ligne et le principe du produit croisé
2. Jugement de la relation de position
1. Jugement de l'intersection complète de deux segments de droite
2. Jugement selon lequel le point final d'un segment est situé sur un autre segment
4. Deux segments de droite sont parallèles mais non colinéaires
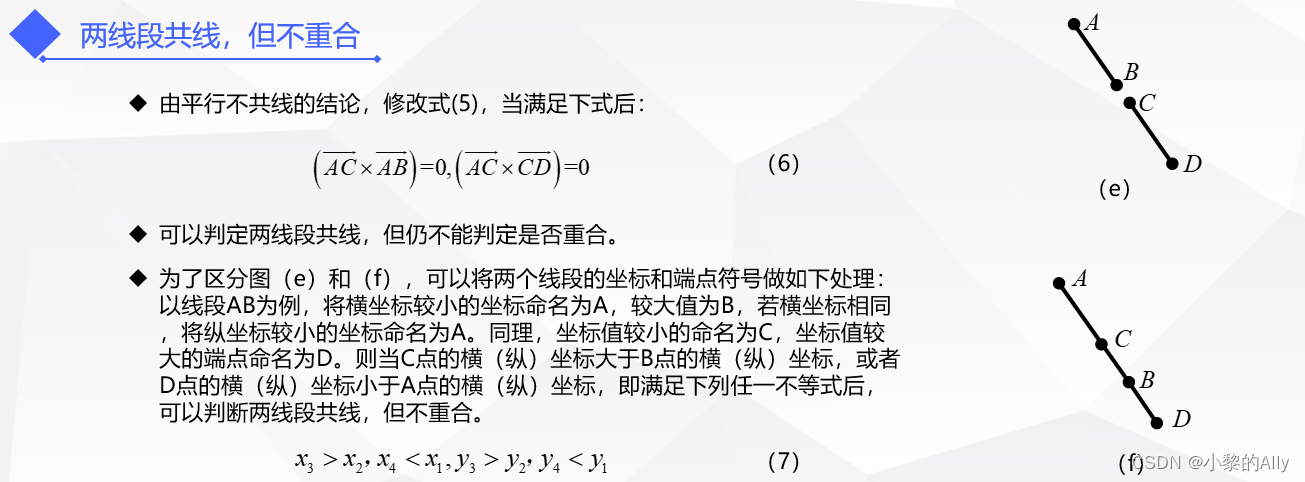
5. Deux segments de droite sont colinéaires, mais ne coïncident pas
6. Deux segments de ligne sont colinéaires et coïncidents
avant-propos
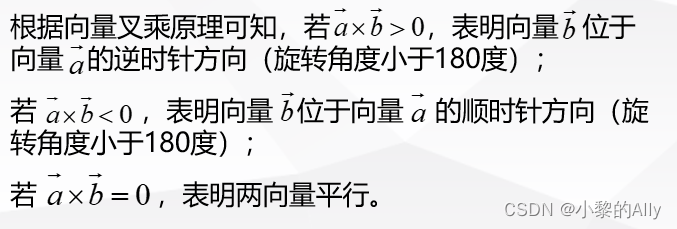
1. La relation de position relative des segments de ligne et le principe du produit croisé
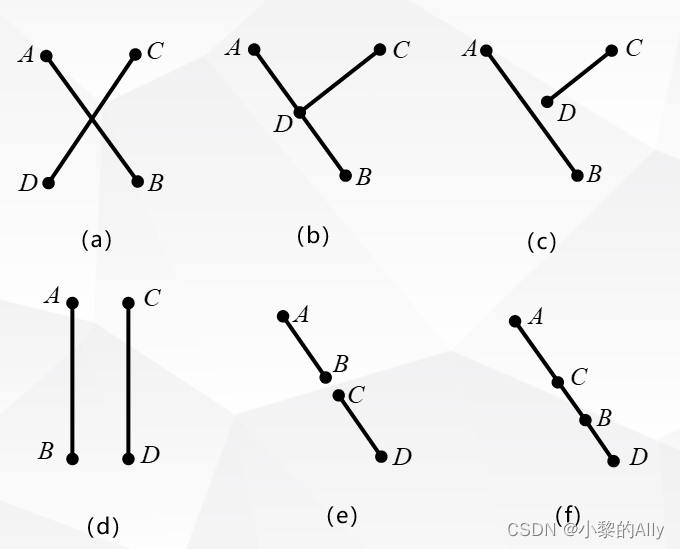
Donnez d’abord la relation de position commune de deux segments de droite du plan :
2. Jugement de la relation de position
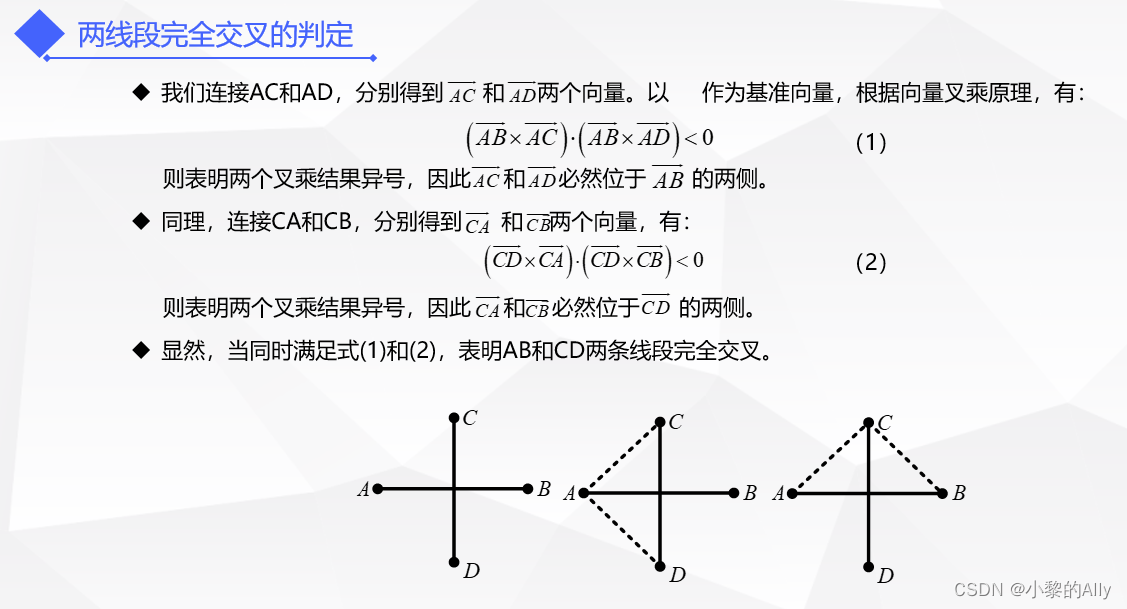
1. Jugement de l'intersection complète de deux segments de droite
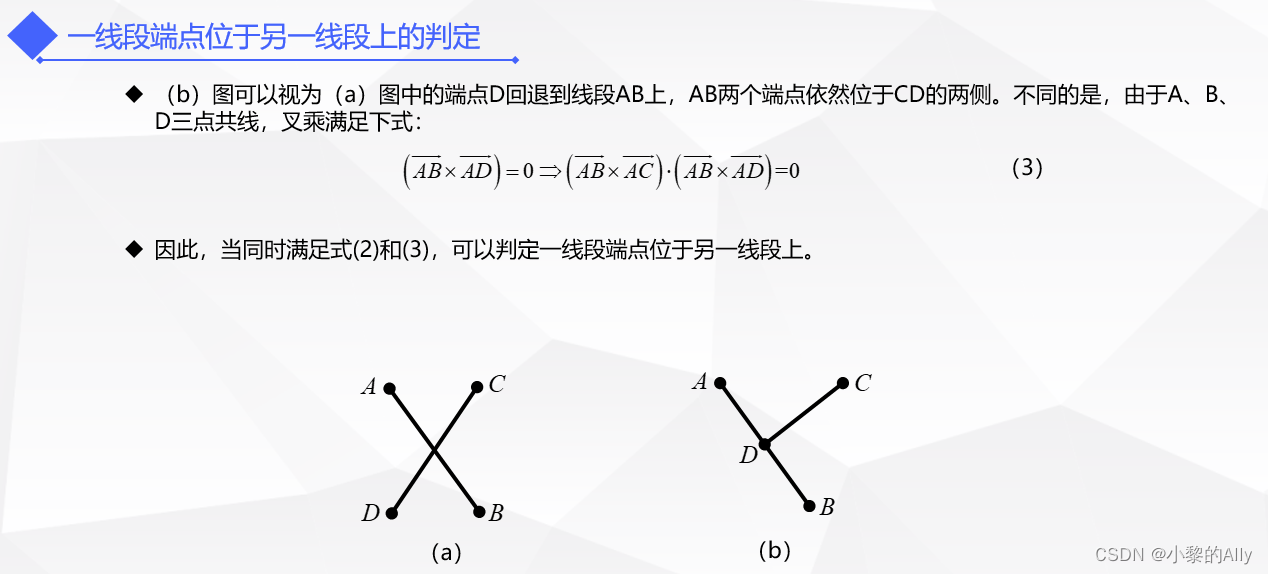
2. Jugement selon lequel le point final d'un segment est situé sur un autre segment

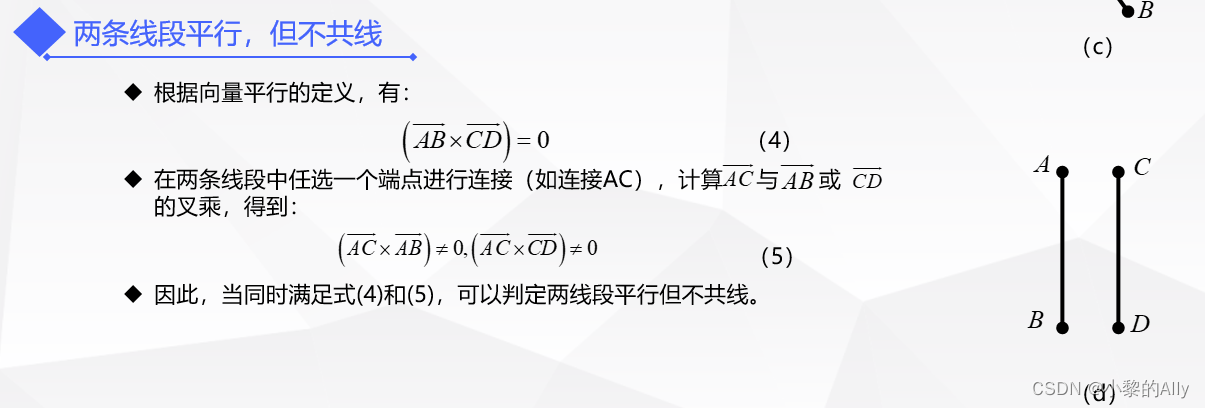
4. Deux segments de droite sont parallèles mais non colinéaires
5. Deux segments de droite sont colinéaires, mais ne coïncident pas
6. Deux segments de ligne sont colinéaires et coïncidents
3. Exemple de simulation
En construisant 6 segments de droite et un côté d'un polygone, nous examinons s'il se coupe. Le diagramme schématique est le suivant :
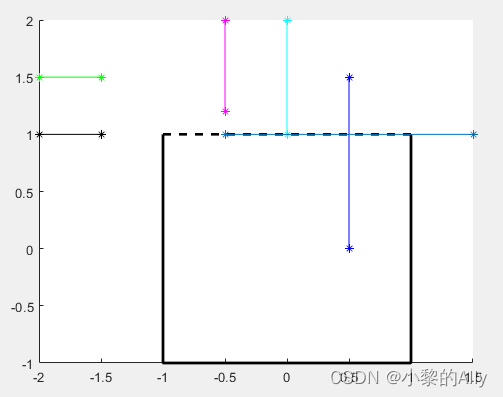
Un exemple de code de simulation est le suivant :
clc
clear
close all
%% 主程序
% 多边形及线段
poly = [-1,1; 1,1; 1,-1; -1,-1;-1,1];
line1 = [0.5,0; 0.5,1.5];
line2 = [0,2; 0,1];
line3 = [-0.5,1.2; -0.5,2];
line4 = [-2 1.5; -1.5,1.5];
line5 = [-2 1; -1.5,1];
line6 = [-0.5 1; 1.5,1];
% 画图
figure
hold on
plot(poly(2:end,1), poly(2:end,2),'k','linewidth',2);
plot(poly(1:2,1), poly(1:2,2),'k--','linewidth',2);
plot(line1(:,1), line1(:,2),'b-*');
plot(line2(:,1), line2(:,2),'c-*');
plot(line3(:,1), line3(:,2),'m-*');
plot(line4(:,1), line4(:,2),'g-*');
plot(line5(:,1), line5(:,2),'k-*');
plot(line6(:,1), line6(:,2),'-*');
% 调用碰撞检测函数
poly_temp = poly(1:2,:);
is_intersect1 = intersect_check(line1,poly_temp);
is_intersect2 = intersect_check(line2,poly_temp);
is_intersect3 = intersect_check(line3,poly_temp);
is_intersect4 = intersect_check(line4,poly_temp);
is_intersect5 = intersect_check(line5,poly_temp);
is_intersect6 = intersect_check(line6,poly_temp);
%% 函数
% 碰撞检测
function is_intersect = intersect_check(line,poly)
[A,B] = sortPoint(line);
ployPointNum = size(poly,1);
is_intersect = false;
for i = 1:ployPointNum-1
line_temp = poly(i:i+1,:);
[C,D] = sortPoint(line_temp);
% 1-检测线段CD的两个端点是否位于线段AB两边
AB = B - A;
AC = C - A;
AD = D - A;
result1 = AB(1) * AC(2) - AB(2) * AC(1);
result2 = AB(1) * AD(2) - AB(2) * AD(1);
% 2-检测线段AB的两个端点是否位于线段CD两边
CD = D - C;
CA = A - C;
CB = B - C;
result3 = CD(1) * CA(2) - CD(2) * CA(1);
result4 = CD(1) * CB(2) - CD(2) * CB(1);
% 3-判断两条线段是否相交
if result1 * result2 < 0 && result3 * result4 < 0 || ...
result1 * result2 == 0 && result3 * result4 < 0 ||...
result1 * result2 < 0 && result3 * result4 == 0
% 若两条线为X形,或者一个端点在另一个线段上(T形),则相交
is_intersect = true;
break
elseif result1 == 0 && result2 == 0 && result3 == 0 && result4 == 0
% 4个都为0,表明两条线段共线,但是否重合需进一步判断
% 由于线段端点已经排序,只需要排除共线但不重合的情况即可
if ~(C(1) > B(1) || D(1) < A(1) || ... % X方向
C(2) > B(2) || D(2) < A(2)) % Y方向
is_intersect = true;
break
end
end
end
end
% 对线段的两个端点排序
function [A,B] = sortPoint(line)
A = line(1,:);
B = line(2,:);
% 将线段的端点按照大小排列
if line(1,1) < line(2,1)
A = line(1,:);
B = line(2,:);
elseif line(1,1) > line(2,1)
A = line(2,:);
B = line(1,:);
else
if line(1,2) < line(2,2)
A = line(1,:);
B = line(2,:);
elseif line(1,2) > line(2,2)
A = line(2,:);
B = line(1,:);
end
end
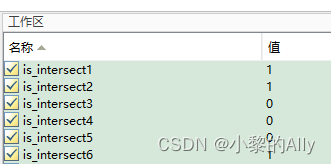
endAprès exécution, les résultats suivants sont obtenus, 1 signifie intersection, 0 signifie disjoint.