Ce chapitre présente d'abord la situation générale du système
PLC existant
, puis présente le contrôleur industriel général conçu dans cet article.
L'architecture globale de la solution, analyse les fonctions qui doivent être réalisées sur le matériel et le logiciel, et enfin analyse les fonctions de chaque partie et propose
plans de mise en œuvre spécifiques.
2.1
Introduction au système API
Le contrôleur logique programmable (
contrôleur logique programmable
,
PLC
) est basé sur le microprocesseur,
Un nouveau type de contrôle automatique universel développé en combinant la technologie informatique, la technologie de contrôle automatique et la technologie de communication
appareil
[14]
. Il utilise un type de mémoire programmable pour son programme de stockage interne, l'exécution d'opérations logiques, le contrôle de séquence,
Instructions orientées utilisateur telles que
les opérations de chronométrage, de comptage et d'arithmétique, et
contrôle divers types de
Les machines ou processus de production constituent l'élément central du contrôle industriel
[15]
.
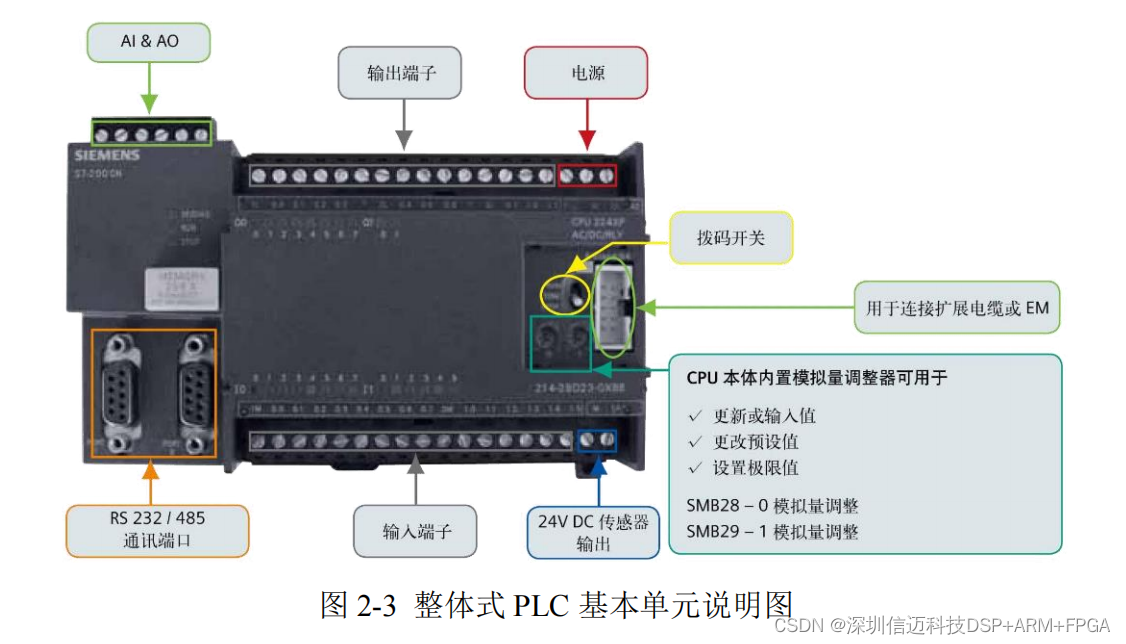
L'
automate Siemens série
S7-200 est un
automate intégré et la figure 2-4 montre l'intérieur de l'une des unités de base de l'automate .
Schéma structurel, sa structure est composée de trois parties : la partie supérieure est la carte mère ou
CPU
, qui comprend le commutateur à cadran, l'unité d'extension
interface ; la partie centrale est la carte d'interface, y compris l'interface
E/S
,
l'interface de communication
RS485 , l'interface d'entrée d'alimentation
220 V AC,
Interface de sortie d'alimentation 24 V
CC, etc. ; la partie inférieure est la carte d'alimentation à découpage, entrée
220 V
CA, sortie 24 V CC.

2.1.3
Système logiciel API
Le logiciel PLC
comprend des programmes système et des programmes utilisateur. Le programme système est solidifié à l'intérieur de la puce CPU
L'utilisateur ne peut pas modifier directement le programme, et le programme système inclut la détection d'état anormal et le fonctionnement de l'unité
d'E/S
.
Fonctionnement, exécution du programme utilisateur, communication avec le monde extérieur et autres fonctions. Le programme utilisateur est utilisé par l'utilisateur pour correspondre au
contrôleur
PLC
Le programme développé par le logiciel de développement, le langage de développement le plus couramment utilisé est le langage de schéma à contacts (
LD
), en plus du langage d'instruction
langage (
IL
), langage de diagramme de blocs fonctionnels (
FBD
), langage d'organigramme de fonctions séquentielles (
SFC
), langage de texte structuré (
ST
).
Pour l'utilisateur, il n'est pas nécessaire de comprendre le programme système en détail, il suffit d'écrire le programme utilisateur en fonction des exigences réelles de production pour réaliser la logique.
Le contrôle d'édition peut être
[28]
.
De nombreux blocs fonctionnels prêts à l'emploi sont souvent utilisés lors de l'édition de schémas à contacts, tels que les modules de minuterie, les modules de compteurs, les modules haute vitesse.
Module de compteur, module d'entrée analogique, module de sortie analogique, module
PID
, module de communication et autres blocs fonctionnels, ceux-ci
Le processus de réalisation des blocs fonctionnels est inclus dans le programme système et le programme utilisateur appelle ces blocs fonctionnels uniquement lors de l'utilisation de ces blocs fonctionnels.
Processus de mise en œuvre
[29]
.
2.2
Architecture globale du programme
Cet article adopte la
structure
PLC intégrale, comme le montre la figure
2-7 , la structure globale est divisée en contrôleur principal et module distant, le principal
Le contrôleur est composé d'une carte centrale, d'une carte d'interface, d'une alimentation à découpage, d'une unité centrale intégrée (
CPU
), d'une unité
d'E/S
et d'une alimentation.
Dans une. En tant que module d'extension, le module distant est utilisé dans les sites industriels avec une grande surface et une large portée, de sorte que le contrôleur principal a besoin


Pour contrôler des appareils de terrain sur une longue distance, le nombre de points
d'E/S peut être augmenté pour le contrôleur principal
, de sorte que le contrôleur puisse être étendu à une grande
et se rapprocher dans le sens de la mondialisation et du multifonction. Le module distant comprend principalement un module d'entrée numérique (
DI
), un module de sortie numérique (
DO
),
Module d'entrée analogique (
AI
), module de sortie analogique (
AO
) et module de communication Ethernet (
EN
), parmi lesquels Ethernet
Le module de communication est principalement responsable de la communication avec le contrôleur principal, de l'envoi de l'état et des données de chaque module distant au contrôleur principal et
Recevez les commandes de contrôle du contrôleur maître.
Le contrôleur conçu dans cet article réalise principalement les structures et fonctions suivantes :
En termes de matériel : la carte
PCB matérielle
doit inclure la carte principale, la carte d'interface, l'alimentation à découpage, le module de communication Ethernet, le numérique
Module d'entrée de quantité de mots, module de sortie de quantité numérique, module d'entrée de quantité analogique, module de sortie de quantité analogique. La carte d'interface nécessite un package
Y compris interface d'entrée et de sortie numérique, interface d'entrée et de sortie analogique, interface d'entrée et de sortie numérique haute vitesse,
USB haute vitesse
Interface de communication, interface de communication
RS485
, interface de communication Ethernet, etc.
Logiciel : protocole de communication
Modbus
, comme protocole de données lorsque le contrôleur principal communique avec le module distant ;
Le protocole de communication interne du module est utilisé comme protocole de données pour la communication entre les modules distants. Concevoir des fonctions de contrôle modulaires,
Y compris le contrôle de mouvement et le contrôle de processus qui sont souvent utilisés dans les sites industriels, et l'algorithme de contrôle
PID
sera utilisé en même temps, si nécessaire
Pour piloter un variateur de fréquence ou un onduleur,
l'algorithme SPWM
et l'algorithme
SVPWM
seront également utilisés. Concevoir un compteur à grande vitesse
Module d'acquisition de signaux de capteurs tels que des codeurs rotatifs. Concevoir l'interface d'interaction homme-machine, pratique à utiliser pour les travailleurs sur site
manette. Concevoir le langage de programmation du programme utilisateur, comme pont entre le langage naturel humain et le langage de programmation sous-jacent de la puce,
Il est pratique pour les travailleurs ordinaires sans aucune base de langage de programmation d'effectuer la programmation et les tests sur site.
2.3
Conception du schéma du contrôleur principal
La conception globale du contrôleur principal est illustrée à la figure
2-8
, qui est divisée en carte centrale, carte d'interface et alimentation à découpage.
Symmet fournit des solutions de contrôle de mouvement STM32+FPGA.
Presque toutes les interfaces externes du contrôleur principal sont conçues sur la carte d'interface, seule l'interface connectée au module d'extension local est conçue
Comptez sur la carte mère.
En raison du volume limité du contrôleur principal, le nombre d'interfaces et de points
d'E/S
inclus est limité, comme
Si plus de points
d'E/S
sont nécessaires, l'interface Ethernet doit être connectée au module distant pour pouvoir être utilisée. L'interface externe du contrôleur principal comprend
16
Interface d'entrée numérique 16 voies,
interface de sortie numérique
16 voies (sortie relais),
interface de sortie numérique haute vitesse 8 voies (cristal
Sortie du tube corporel),
interface d'entrée d'alimentation
220 V AC, interface de sortie d'alimentation
24 V DC, interface de communication USB haute vitesse ,
Interface de communication RS485
, interface de communication Ethernet. À l'intérieur du contrôleur principal, l'alimentation à découpage est connectée à la carte d'interface et la carte d'interface
Entrez l' entrée d'alimentation
220 V CA de
l'extérieur vers la carte d'alimentation à découpage, puis elle sera stabilisée après avoir traversé l'alimentation à découpage.
Une alimentation fixe
24V DC.
La carte d'interface est connectée à la carte principale, l'une est
de 5 V obtenue en abaissant
24 V
via
DC/DC.
L'alimentation est transmise à la carte mère, et la seconde consiste à transmettre les signaux
d'E/S
et la communication du port série avec la puce de contrôle sur la carte mère.
2.3.1
Conception du schéma de carte de base
La structure matérielle de la carte mère comprend un circuit de puce de contrôle, un circuit de téléchargement, un circuit d'oscillateur à cristal, un circuit de réinitialisation et une alimentation de puce.
circuit,
circuit de communication
RS485 , circuit de sélection d'état, circuit d'indication d'état,
circuit d'indication d'E/S , circuit de conversion de niveau
attendez.
La puce de contrôle est contrôlée par la méthode actuellement populaire «
MCU+FPGA »
[32] . MCU est un microcontrôleur
L'unité (
Micro Controller Unit
), également connue sous le nom de micro-ordinateur monopuce ou micro-ordinateur monopuce, est l'unité centrale de traitement, la mémoire,
Compteur,
USB
,
conversion
A/D ,
UART , PWM , DMA et autres interfaces périphériques sont intégrés dans une seule puce pour former
Les ordinateurs au niveau des puces sont utilisés dans des domaines de contrôle tels que les téléphones mobiles, les télécommandes, les voitures et les bras robotiques.
Les FPGA
sont programmables sur site
Réseau de portes (
Field Programmable Gate Array
), qui est un circuit semi-personnalisé en ASIC, généralement
Le réseau de portes logiques de bas niveau est combiné par programmation, de manière à réaliser
la connexion entre les modules internes et
les E/S .
Le FPGA
présente les avantages suivants : un parallélisme élevé, peut prendre en charge plusieurs modules pour effectuer des calculs indépendants en même temps ; peut être personnalisé, c'est-à-dire
Réalisez votre propre circuit logique grâce à la programmation et peut être programmé à l'infini ; la vitesse de fonctionnement est rapide et la tâche est généralement en
L'exécution sur du matériel est plus rapide que l'exécution sur un logiciel. Par exemple, en comparant la taille d'un
32 bits de
64 bits
de haut
et de 32 bits de bas, dans le processeur
Ce qui suit nécessite
2
instructions de numéro de zone, deux instructions bit et, une instruction de décalage, une instruction de comparaison et une instruction de réécriture, et
Sous
le FPGA,
un seul comparateur est requis.
Le FPGA
présente également des inconvénients, toutes les fonctions dépendent de la mise en œuvre matérielle
Désormais, les opérations telles que les conditions de branchement et les sauts ne peuvent pas être réalisées, et en même temps , il existe peu de périphériques tels que la conversion
A/D
,
le flash , etc., qui peuvent simplement
De quoi compter sur
le MCU
pour compenser. Par conséquent, cet article utilise la combinaison de
MCU
et
de FPGA
pour maximiser les avantages des deux.
Avantage personnel
[33]
.
Le MCU choisit
le microcontrôleur STM32 32 bits
développé par STMicroelectronics , basé sur
ARM
Le microcontrôleur intégré avec cœur de processeur Cortex-M
présente les caractéristiques d'une intégration élevée et d'une faible consommation d'énergie.
Sélection
FPGA
Puces de la série Cyclone IV
d'
ALTERA , basées sur Cyclone , CycloneII et CycloneIII
Basé sur des performances améliorées et des coûts réduits.
STM32
utilise ses propres périphériques riches comme puce de contrôle principale, en utilisant
UART
Communiquez avec le monde extérieur ;
le FPGA
traite les signaux d’E/S
en utilisant les caractéristiques d’une vitesse de calcul rapide et d’une bonne concurrence .
STM32
Les méthodes de communication avec
FPGA
incluent la communication série, la communication parallèle et la communication en mémoire partagée. Bottes requises pour la communication série
Il y a moins de broches, mais la vitesse n'est pas aussi rapide que les deux autres méthodes de communication ; la méthode de communication en mémoire partagée est plus compliquée sur le circuit matériel,
Il est généralement utilisé dans des occasions où l'échange de données est important, et il est un peu excessif de l'utiliser ici ; bien que la communication parallèle occupe plus de broches,
Mais l'efficacité de la communication est élevée
[34]
. Dans l’ensemble, choisissez la méthode de communication parallèle.
Le circuit d'alimentation doit être déterminé en fonction de la tension requise par la puce de contrôle. La puce de contrôle
STM32
sélectionnée sur la carte mère
Le modèle spécifique est
STM32F103ZET6
, la tension de fonctionnement est
de 3,3 V
, le modèle spécifique de
FPGA
est
EP4CE6E22C8
,
Les tensions de fonctionnement sont
de 3,3 V
,
2,5 V
et
1,2
V.
Les méthodes de téléchargement du STM32
incluent les méthodes
SWD
et
JTAG
. Le mode
SWD
est plus efficace que
JTAG
en mode haute vitesse.
Plus fiable, le programme de téléchargement JTAG
échouera
dans le cas d'une grande quantité de données , mais la probabilité de
SWD sera très faible
Beaucoup, et
le nombre de broches requises par
SWD est faible, ce qui peut économiser de l'espace
sur le PCB . Bien que le STM32 ait un cristal interne de 8 MHz
Oscillation, mais la précision n'est pas aussi élevée que l'oscillateur à cristal à grande vitesse avec configuration externe. Il existe deux types d'oscillateurs à cristal externes : l'oscillateur à cristal à grande vitesse et l'oscillateur à cristal à basse vitesse.
L'oscillateur à cristal à basse vitesse typique est
de 32,768 kHz
, et l'oscillateur à cristal à grande vitesse peut être sélectionné entre
4 et 32 MHz
, puis il peut être réglé par la boucle à verrouillage de phase.
La fréquence principale s'élève à
72 MHz
. L'interface du module d'extension qui doit être réservée sur la carte mère est utilisée pour connecter plusieurs modules d'extension.
La méthode de communication entre les modules d'extension choisit ici la communication
RS485
, car
RS485
prend en charge un mode maître et plusieurs modes esclaves. en même temps
Il est nécessaire de concevoir un circuit de sélection d'état et un circuit d'indication d'état autour de STM32
. Le circuit de sélection d'état utilise un commutateur à cadran comme
L'entrée broche du STM32
, le circuit d'indication d'état utilise
la LED
comme sortie broche du
STM32
.
Le FPGA
n'a pas
de flash sur puce
, les programmes
FPGA
doivent donc être stockés dans
un flash hors puce
, sélectionnez ici
EPCS4SI8N
est utilisé comme
flash hors puce du
FPGA
. Les méthodes de téléchargement FPGA incluent le mode JTAG , le mode AS et PS
modèle.
En mode AS
, le programme est gravé dans la puce de configuration
EPCS
et chaque fois que
le FPGA
est allumé, il agit comme un contrôleur de la puce de configuration.
Réglez la puce
EPCS
pour lire les données ; le mode
PS
consiste à utiliser
EPCS
comme dispositif de contrôle, à utiliser
FPGA
comme mémoire et
FPGA.
Lorsqu'il est allumé,
EPCS
écrira activement les données dans
le FPGA
, ce mode peut réaliser
la programmation en ligne du
FPGA ;
Le mode JTAG
est le mode le plus couramment utilisé, qui grave directement le programme dans
la SRAM du
FPGA
, donc après une panne de courant
la séquence disparaîtra.
Lorsque le FPGA
fonctionne normalement, ses données de configuration sont stockées dans
la SRAM
et doivent être téléchargées à nouveau lors de sa mise sous tension.
Dans le système expérimental, un ordinateur ou un contrôleur est généralement utilisé pour le débogage, donc
PS peut être utilisé
. Mais dans le système pratique
Dans la plupart des cas,
le processus d'opération de configuration doit être activement guidé par
le FPGA . À ce stade,
le FPGA va activement
Les données de configuration sont obtenues à partir de la puce de stockage et
les informations de configuration FPGA
de cette puce sont obtenues en utilisant un programmeur commun pour concevoir
le .pof.
Le fichier de format est gravé via
AS
.
Graver le fichier .sof via le mode
JTAG
gravera le programme dans la SRAM ,
Cependant, grâce à la conversion de fichier,
le
fichier .sof est converti en fichier
.jic
et
le programme passera par le FPGA via la gravure en mode
JTAG .
Il est solidifié dans la puce de configuration
EPCS
, afin que
le FPGA
lise
le programme de
l'EPCS lors de sa remise sous tension.
L'examen final de cet article
Compte tenu de la commodité du débogage, nous avons choisi
le mode JTAG
.
La fréquence principale du FPGA
nécessite un oscillateur à cristal externe, et
le STM32
dispose d'un circuit de démarrage d'oscillateur à cristal à l'intérieur, donc un oscillateur à cristal passif peut être utilisé.
Mais
le FPGA
ne l'a pas, donc
le FPGA
ne peut être connecté qu'à un oscillateur à cristal actif, choisissez ici
50 MHz
comme
source d'horloge
FPGA ,
Une horloge allant jusqu'à 300 MHz
peut être obtenue en multipliant la fréquence de la boucle à verrouillage de phase
.
Les broches FPGA
peuvent être configurées en mode d'entrée ou en mode de sortie, qui sont tous des signaux
3,3VTTL
.
Les
broches d'entrée et de sortie FPGA contrôlent directement
les LED
comme
voyants
d'E/S , un total de
40 , 16 points d'entrée, 16 sorties.
Point de sortie,
8
points de sortie à grande vitesse. La carte centrale et la carte d'interface sont connectées ensemble via des connecteurs pour transmettre les signaux de données des points
d'E/S
.
Non, entre
le FPGA
et le connecteur, une puce de conversion de niveau est également connectée, entre le signal
3.3VTTL
et le
signal
5VTTL
L'interconversion et la puce de conversion de niveau peuvent jouer un rôle de protection pour empêcher les broches
du FPGA
d'être directement connectées à l'extérieur
[35]
.
2.3.2
Conception du schéma de la carte d'interface
La structure matérielle de la carte d'interface comprend un circuit d'entrée optocoupleur, un circuit de sortie relais, un circuit de sortie transistor,
RS485 .
Circuit de communication, circuit de communication
USB
, module de communication Ethernet,
circuit abaisseur
DC/DC , carte mère et carte d'alimentation
circuit d'interface, etc.
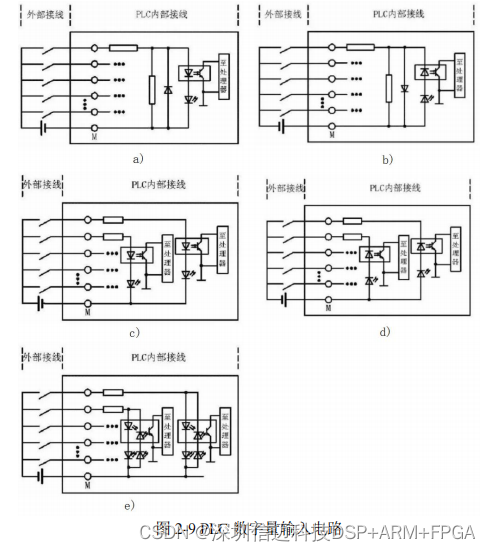
Le circuit d'entrée de l'optocoupleur est utilisé pour entrer le signal de commutation externe. Généralement,
le module d'entrée du
PLC se compose de plusieurs points d'entrée
et un terminal commun. Comme le montre
la figure
2-9 ,
a) et b) sont deux formes différentes de circuits d'entrée CC PLC , la différence est que
Lorsque l'interrupteur externe est fermé,
le courant en
a)
sort du PLC (entrée source) depuis la borne commune M et le courant en b) sort du commun.
La borne
M
circule dans
l'automate
(entrée descendante). Lorsque l'interrupteur est fermé,
la diode électroluminescente de l'optocoupleur à l'intérieur
du PLC s'allume et les trois photosensibles
Le tube polaire est saturé et allumé, puis le signal est envoyé à l'unité centrale, et on considère qu'il y a un signal d'entrée.
c)
et
d) sont
respectivement
a)
et
b)
structure de signal multicanal. Afin de s'adapter à davantage d'appareils de terrain, cet article utilise
le circuit d'entrée hybride présenté en
e) , optocoupleur
Choisissez un optocoupleur d'entrée bidirectionnelle, et la forme de câblage externe peut être à la fois une entrée d'énergie et une entrée de puits.
2.5
Conception du schéma logiciel
2.5.1
Système d'exploitation intégré
Bien que les applications embarquées puissent s'exécuter directement sur la puce, pour appeler plus raisonnablement le multitâche,
Pour utiliser pleinement les ressources du système, cet article adopte
le schéma de transplantation du système d'exploitation embarqué sur
STM32 .
intégration actuellement utilisée
Les systèmes d'exploitation embarqués incluent
μClinux
,
μC/OS-II
,
eCos
et
FreeRTOS
.
μClinux
(
micro-control Linux
) est un
Linux à micro-contrôle
. Par rapport au
Linux standard
, le
noyau
μClinux
Petit, mais hérite toujours de la bonne stabilité et portabilité
de Linux
, et possède de puissantes fonctions réseau, un excellent texte
système logiciel,
API riche en normes
et
protocole réseau
TCP/IP , etc.
En termes de transplantation, puisque
µClinux
est
Linux
Une amélioration destinée aux systèmes embarqués, donc sa structure est plus compliquée et le processeur cible a besoin d'un processeur externe
ROM
et
RAM
, pour
STM32F103
, la transplantation de ce système nécessite au moins
512 Ko
d' espace
RAM
,
1 Mo
Espace ROM
/FLASH , et
STM32F103 n'a que 256 Ko de FLASH , donc une mémoire externe est requise,
Cela augmente les coûts du matériel. De plus,
μClinux
a une structure complexe, est difficile à transplanter et a de mauvaises performances en temps réel, il ne convient donc pas comme plateforme.
Le schéma de transplantation de ce système.
μC/OS-II
est
un noyau temps réel multitâche compact et préemptif écrit en langage
C.
µC/OS-II
Jusqu'à 64 tâches
sont prises en charge
, correspondant aux priorités
0 à 63
, où
0
représente la priorité la plus élevée,
63
la plus basse et le système
Les 4
priorités les plus élevées et
les 4
priorités les plus basses
sont réservées , ce qui fait que
56 tâches sont disponibles pour l'utilisateur
.
µC/OS-II
Il peut fournir des fonctions telles que la planification et la gestion des tâches, la gestion de la mémoire, la synchronisation et la communication entre les tâches, la gestion du temps et le service d'interruption, etc.
Il présente les caractéristiques d'une efficacité d'exécution élevée, d'un faible encombrement, d'excellentes performances en temps réel et d'une forte évolutivité. En portage,
μC/OS-II
Prend en charge la plupart des
processeurs actuellement populaires
. En raison de son petit cœur, le code minimum n'est que de
2 Ko
et un espace de données est requis.
Il n'y a que
4 Ko
de
RAM
, le portage est donc relativement simple, il suffit de modifier le code lié au processeur, qui est plus adapté
Il peut être transplanté ensemble sur ce système.
eCos
(
embedded Configurable Operating System
) est un système d'exploitation configurable embarqué, un
Le système d'exploitation configurable, portable et en temps réel de Kaiyuan pour les applications profondément intégrées. sa plus grande caractéristique
C'est-à-dire que le noyau est configurable et la configuration flexible apportée par la méthode de conception modulaire. La partie centrale est composée de composants similaires.
Les composants tels que le noyau, la bibliothèque de langage C et les packages d'exécution sous-jacents peuvent être facilement configurés via l'outil de configuration
eCos et peuvent être facilement
Bon pour répondre aux besoins des différentes applications embarquées. En termes de transplantation,
le
noyau eCos est petit, le code minimum n'est que
de 10 Ko
et le code requis
L'espace de données n'est que
de 10 Ko
de
RAM
et la portabilité est bonne, ce qui
est plus facile que
μClinux
et
μC/OS-II , mais
Son application n'est pas étendue et il n'existe pas autant de documents que
μC/OS-II
, et il est plus adapté à des applications telles que l'électronique grand public.
FreeRTOS
est un système d'exploitation en temps réel entièrement gratuit et pouvant
fonctionner sur de petits microcontrôleurs
RAM .
Des fonctionnalités telles que le développement de code, une forte portabilité, la personnalisation et des stratégies de planification flexibles.
Le système d'exploitation FreeRTOS
peut compléter
La gestion des tâches, la gestion du temps, le sémaphore, la file d'attente des messages, la gestion de la mémoire, l'enregistrement et d'autres fonctions peuvent répondre à un minimum
Exigences de base du système d'exploitation. En termes de portage,
FreeRTOS
peut être facilement porté sur différents processeurs, tels que
ARM
,
MSP430
,
PIC
,
AVR
,
C8051F
, etc.,
le cœur de
STM32 est
ARM , donc FreeRTOS
Il convient à la transplantation de ce système, et c'est également le système d'exploitation embarqué adopté dans cet article.
2.5.2
Système logiciel
Un système logiciel se compose de programmes système et de programmes utilisateur. Le programme système est le programme solidifié dans la puce de contrôle.
Le contrôleur est composé d'un contrôleur principal et d'un module distant. Il y a
deux puces de contrôle,
STM32
et
FPGA , sur le contrôleur principal. Il existe
5 types
Les modules distants ont chacun un STM32
comme puce de contrôle
pour réaliser leurs fonctions respectives , il est donc nécessaire de concevoir
7
ensembles de différents
Programme système, le langage de programmation comprend
le langage C requis par
STM32 et le langage
Verilog HDL requis par FPGA . utiliser
Édition des programmes utilisateur Cet article conçoit deux ensembles de solutions, l'une consiste à concevoir un
logiciel de programmation côté
PC , qui peut être téléchargé via le
port USB .
Au flash du contrôleur principal
STM32
, et l'autre est la fonction de programmation sur site, c'est-à-dire via l'interface d'interaction homme-machine, en utilisant
Les mots-clés permettent aux utilisateurs ordinaires sans bases de programmation d'écrire des programmes de test simples, ce qui est pratique pour le débogage sur site
[36][37]
.
2.5.3
Fonction modulaire
Cet article conçoit des fonctions modulaires, le contrôle de mouvement et le contrôle de processus. Le contrôle de mouvement est souvent utilisé dans les machines, les machines-outils, les machines
Robots, contrôle d'ascenseur et autres occasions, utilisés pour piloter des moteurs pas à pas, des servomoteurs ou des moteurs à courant alternatif, un contrôleur est actuellement requis
Pour générer les signaux de commande correspondants, tels que la commande de moteurs à courant alternatif asynchrones, les algorithmes
SPWM
et
SVPWM
sont nécessaires pour déplacer simultanément
Le contrôle utilisera souvent l'encodeur pour mesurer la vitesse et la position. Ce document décrit la fonction du compteur à nombre élevé sur le logiciel. processus
Le contrôle est souvent utilisé dans la métallurgie, l'industrie chimique, le contrôle de chaudières, etc., pour le contrôle en boucle fermée de grandeurs analogiques telles que la température, la pression et le débit.
Contrôle, à ce moment, le contrôleur doit implémenter l'algorithme
PID
.
2.5.4
Protocole de communication
Chaque fabricant
d’automates possède généralement son propre protocole de communication. Par exemple,
l’automate
Rockwell
prend en charge le protocole DF1 .
Les automates
des
séries
90-70
et
90-30
de GE prennent en charge le protocole SNP , et les automates de la série Siemens S-200 prennent en charge MPI et PPI.
L'automate
Schneider
prend en charge les protocoles
Modbus
et
Modbus Plus
,
l'automate Omron
prend en charge
le protocole
Host Link
Selon l'accord, Mitsubishi
PLC
prend en charge le protocole
CC-Link
et Panasonic
PLC
prend en charge le protocole
MEWTOCOL-COM
. Parmi eux Modbus
Ce n'est pas seulement le protocole de communication du
PLC
, il est également utilisé dans de nombreux instruments intelligents et convertisseurs de fréquence, et il a été utilisé dans le domaine du contrôle industriel.
Il a été largement utilisé dans le domaine
[38]
.
Dans cet article, Modbus
est sélectionné
comme protocole de données pour la communication entre le contrôleur principal et le module distant.
Dans le protocole mentionné ci-dessus,
le protocole MEWTOCOL-COM
est ouvert et simple. Cet article apporte quelques modifications sur cette base.
En tant
que protocole de données pour la communication entre
RMEN
et les modules
d'E/S , il sera appelé
ultérieurement protocole RM-COM .
Symmet fournit des solutions de contrôle de mouvement STM32+FPGA.