Installez Ubuntu20.04+ros-noetic sur Raspberry Pi 4b
- avant-propos
- 1. Téléchargement miroir
- 2. Système de gravure
- 3. Initialisation du système
- 3. Changer les sources nationales
- Quatrièmement, installez l'environnement de bureau
- 5. Installer l'environnement ROS
avant-propos
Cet article présente les étapes d'installation de Raspberry Pi pour installer Ubuntu et prend en charge différentes versions d'Ubuntu
Voici le texte de cet article pour référence
1. Téléchargement miroir
La dernière version d'Ubuntu (Ubuntu20.04) pour Raspberry Pi peut être téléchargée sur le site officiel d'Ubuntu

Pour les versions historiques d'Ubuntu, il est recommandé d'utiliser le site miroir pour télécharger http://cdimage.ubuntu.com/releases/

2. Système de gravure
1. Insérez la carte TF, formatez d'abord la carte TF
Choisissez simplement une méthode :
2. Graver l'image
Méthode 1. Logiciel de gravure officiel Raspberry Pi Imager
Connectez-vous à Raspberry Pi Imager

Téléchargez, installez et ouvrez
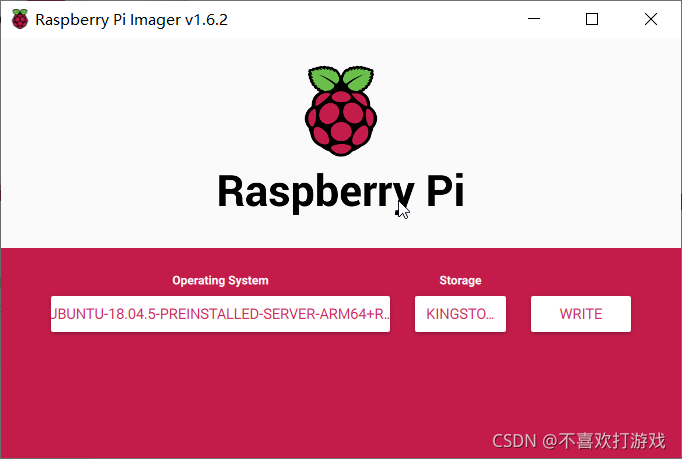
Sélectionnez l'image à graver dans CHOOSE OS Sélectionnez
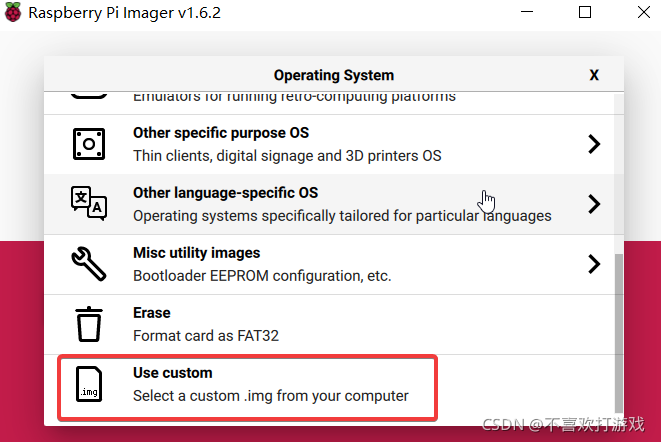
l'image Raspberry Pi Ubuntu à graver
Sélectionnez la carte TF à graver et gravez
Méthode 2. Win32DiskImager
3. Après la gravure, le système vous indiquera que le disque U doit être formaté et qu'il ne doit pas être formaté pour le moment ! ! ! , éjectez la carte TF, insérez le Raspberry Pi et initialisez le système
3. Initialisation du système
Il est recommandé d'utiliser un moniteur, une souris et un clavier, ce qui sera beaucoup plus simple
1. Première connexion
Une fois le système initialisé, vous serez invité à entrer le nom d'utilisateur et le mot de passe. Le nom d'utilisateur et le mot de passe ici sont tous deux ubuntu
2. Changer le mot de passe
Après la première connexion, le système vous demandera de changer le mot de passe
提示输入当前用户名current user,输入ubuntu
接下来输入两次新密码,完成密码修改
3. Changer les sources nationales
Si vous changez de pays, vous pouvez télécharger les logiciels et les dépendances plus rapidement
1. Rechercher des sources nationales couramment utilisées, telles que la source Tsinghua, la source Ali, la source de l'Université Zhongke
Aliyuan Aliyuan est sélectionné ici
2. Modifiez source.listle fichier
Tout d'abord source.list, la sauvegarde est utilisée pour source.listla restauration de fichiers,
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
Si vous voulez source.listrestaurer
sudo cp /etc/apt/sources.list.bak /etc/apt/sources.list
Entrée terminale, source.listfichier ouvert
sudo nano /etc/apt/sources.list
Remplacez toutes les URL qu'il contient par http://mirrors.aliyun.com/ubuntu-ports/
l'effet final
deb http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiv>
deb http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe m>
deb-src http://mirrors.aliyun.com/ubuntu/ focal-security main restricted univer>
deb http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe mu>
deb-src http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted univers>
deb http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted universe m>
deb-src http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted univer>
deb http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe >
deb-src http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted unive>
mettre en œuvre
sudo apt-get updata
sudo apt-get upgrade
Si aucune erreur n'est signalée, le changement de source a réussi
Quatrièmement, installez l'environnement de bureau
sudo apt-get install ubuntu-desktop
Redémarrez le système pour voir le bureau classique Ubuntu
roboot
5. Installer l'environnement ROS
1. Ajouter la source du logiciel ROS et importer la clé
Il est recommandé d'utiliser des sources logicielles nationales ici. Le fichier de téléchargement ROS est volumineux et prend beaucoup de temps. L'utilisation de sources logicielles ROS nationales peut réduire le temps de téléchargement ROS.
Vous pouvez demander comment utiliser la source logicielle ROS nationale sur le site Web officiel de la source logicielle :
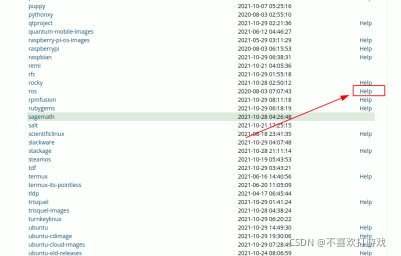
Prenons l'exemple de la source logicielle de l'Université des sciences et technologies de Chine :
在web中搜索中科大源

找到ros,点击右侧Help
#按照提示安装即可
#添加软件源
sudo sh -c 'echo "deb https://mirrors.ustc.edu.cn/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
#导入KEY
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
#更新软件源缓存
sudo apt update

2. Installez la version complète du bureau
sudo apt install ros-noetic-desktop-full
Le processus d'installation prend beaucoup de temps, alors soyez patient.
3. Définir les variables d'environnement
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
4. Initialisation ROS
Il n'est pas recommandé d'utiliser le rosdepdidacticiel d'initialisation officiel ici, car il est sujet à des problèmes tels que l'échec de la connexion et le taux de réussite de l'utilisation de sources nationales est plus élevé.Ici, j'utilise Xiaoyu ROS pour résoudre la méthode d'initialisation et le taux de réussite est plus élevé.
sudo apt-get install python3-pip

sudo pip install rosdepc
sudo rosdepc init

rosdepc update

5. Test ROS (roscore et petite tortue)
(1) test roscore
roscore
(2)rosrun tortuesim tortuesim_node
rosrun turtlesim turtlesim_node
打开小海龟仿真界面
(3)rosrun turtlesim turtle_teleop_key
rosrun turtlesim turtle_teleop_key
通过键盘控制小海龟运动

Voir le mouvement de la petite tortue signifie que l'installation de ROS est réussie.