Zustandsmaschine – Erkennung überlappender Sequenzen
`timescale 1ns/1ns
module sequence_test2(
input wire clk ,
input wire rst ,
input wire data ,
output reg flag
);
//*************code***********//
parameter S0=0, S1=1, S2=2, S3=3, S4=4;
reg [2:0] state, nstate;
always@(posedge clk or negedge rst) begin
if(~rst)
state <= S0;
else
state <= nstate;
end
always@(*) begin
if(~rst)
nstate <= S0;
else
case(state)
S0 : nstate <= data? S1: S0;
S1 : nstate <= data? S1: S2;
S2 : nstate <= data? S3: S0;
S3 : nstate <= data? S4: S2;
S4 : nstate <= data? S1: S2;
default: nstate <= S0;
endcase
end
always@(posedge clk or negedge rst) begin
if(~rst)
flag <= 0;
else
flag <= state==S4;
end
//*************code***********//
endmodule
Zustandsmaschine – nicht überlappende Sequenzerkennung
Erkennen Sie eine Sequenz nur einmal. Das ist die Realität. Sie müssen keine anderen Dinge berücksichtigen. Passen Sie sie einfach an. Machen Sie sich keine Sorgen über Nichtübereinstimmungen.
`timescale 1ns/1ns
module sequence_test1(
input wire clk ,
input wire rst ,
input wire data ,
output reg flag
);
parameter idle=0,s1=1,s2=2,s3=3,s4=4,s5=5;
reg[2:0]cs;
reg[2:0]ns;
always@(posedge clk,negedge rst)begin
if(!rst)begin
cs<=idle;
end
else begin
cs<=ns;
end
end
always@(*)begin
case(cs)
idle:ns=(data==1)?s1:idle;
s1:ns=(data==0)?s2:idle;
s2:ns=(data==1)?s3:idle;
s3:ns=(data==1)?s4:idle;
s4:ns=(data==1)?s5:idle;
default:ns=idle;
endcase
end
always@(posedge clk,negedge rst)begin
if(!rst)begin
flag<=0;
end
else begin
flag<=ns==s5;
end
end
endmoduleNicht überlappende Sequenzerkennung
Zustandsmaschine
Es ist bequemer, eine Zustandsmaschine zu verwenden. Zur Sequenzerkennung wird die Methode entsprechend den Merkmalen ausgewählt. Die einfachste ist der MOORE-Typ. Es hängt davon ab, ob sie langsam ist oder nicht. Ändern Sie CS und NS direkt während der Ausgabebeurteilung. Wenn Sie möchten, dass es langsamer ist, verwenden Sie CS. Wenn nicht, verwenden Sie CS. Nur NS
Die MOORE- und MEALY-Typen von nS weisen die gleiche Synchronisation auf
Wenn keine Überlappung vorliegt, kehrt es direkt in den Ausgangszustand zurück, wenn keine Übereinstimmung vorliegt, und es ist kein Kmp-Abgleich erforderlich.
Schieberegister
Auf Basis des Schieberegisters wird ein CNT-Limit hinzugefügt‘
`timescale 1ns/1ns
module sequence_detect(
input clk,
input rst_n,
input data,
output reg match,
output reg not_match
);
reg[2:0]cnt;
reg[5:0]ram;
always@(posedge clk,negedge rst_n)begin
if(!rst_n)
cnt<=0;
else
cnt<=cnt==5?0:cnt+1;
end
always@(posedge clk,negedge rst_n)begin
if(!rst_n)
ram<=0;
else
ram<={ram[4:0],data};
end
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
match<=0;
not_match<=0;
end
else begin
match<=(cnt==5)&&({ram[4:0],data}==6'b011100);
not_match<=(cnt==5)&&({ram[4:0],data}!=6'b011100);
end
end
endmoduleSequenzerkennung mit Fremdkörpern
Schieberegister
Verwenden Sie zwei Signale, um zu bestimmen, ob die linke und rechte Seite die Anforderungen erfüllen. Wenn beide erfüllt sind, wird 1 ausgegeben
`timescale 1ns/1ns
module sequence_detect(
input clk,
input rst_n,
input a,
output match
);
reg[8:0]temp;
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
temp<=9'b0;
end
else begin
temp<={temp[7:0],a};
end
end
reg ma;
reg mb;
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
ma<='b0;
end
else begin
if(temp[8:6]==3'b011)
ma<=1'b1;
else
ma<=1'b0;
end
end
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
mb<='b0;
end
else begin
if(temp[2:0]==3'b110)
mb<=1'b1;
else
mb<=1'b0;
end
end
assign match=ma&mb;
endmoduleSequenzerkennung für kontinuierliche Eingabesequenz
Schieberegister
Dieses Schieberegister bestimmt direkt, was im Register gespeichert ist, dh den aktuellen Zustand des Registers, es handelt sich also um eine MOORE-Zustandsmaschine.
`timescale 1ns/1ns
module sequence_detect(
input clk,
input rst_n,
input a,
output reg match
);
reg[7:0]atemp;
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
atemp<=8'b0;
end
else
atemp<={atemp[6:0],a};
end
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
match=1'b0;
end
else begin
if(atemp==8'b0111_0001)
match=1'b1;
else
match='b0;
end
end
endmoduleZustandsmaschine
`timescale 1ns/1ns
module sequence_detect(
input clk,
input rst_n,
input a,
output reg match
);
parameter idle=0,s1=1,s2=2,s3=3,s4=4,s5=5,s6=6,s7=7,s8=8;
reg[3:0]cs;
reg[3:0]ns;
always@(posedge clk,negedge rst_n)begin
if(!rst_n)
cs<=idle;
else
cs<=ns;
end
always@(*)begin
case(cs)
idle:begin
ns=(a==0)?s1:idle;
end
s1:begin
ns=(a==1)?s2:s1;
end
s2:begin
ns=(a==1)?s3:s1;
end
s3:begin
ns=(a==1)?s4:s1;
end
s4:begin
ns=(a==0)?s5:idle;
end
s5:begin
ns=(a==0)?s6:s2;
end
s6:begin
ns=(a==0)?s7:s2;
end
s7:begin
ns=(a==1)?s8:s1;
end
s8:begin
ns=(a==1)?s3:s1;
end
default:ns=idle;
endcase
end
always@(posedge clk,negedge rst_n)begin
if(!rst_n)
match<=0;
else
match<=(cs==s8)?1:0;
end
endmoduleWas die MOORE-Maschine beurteilt, ist der aktuelle Zustand, also machen Sie eine langsame Aufnahme.
Wenn die MOORE-Maschine den nächsten Zustand bestimmt, wird dieser wie die MEALY-Maschine synchron ausgegeben.
Sequenzerkennung für Diskontinuitäten der Eingabesequenz
Schieberegister (Ausgabe im gleichen Zyklus, Typ MEALY)
Bei der Ausgangsbeurteilung wird es durch den aktuellen Zustand und das Eingangssignal bestimmt.
Es ist zu verschieben, wenn es gültig ist, und dann ist auch zu beachten, dass, da das Signal im gleichen Takt ausgegeben werden soll, da die Verschiebung im nächsten Bit aktualisiert wird, der in diesem Zyklus aktualisierte RAM im nächsten Zyklus ausgeführt wird . Beurteilung, daher kommt es zu einer Verzögerung, daher muss die Ausgabebeurteilung mit dem aktuellen Status, also dem MEALY-Typ, kombiniert werden
`timescale 1ns/1ns
module sequence_detect(
input clk,
input rst_n,
input data,
input data_valid,
output reg match
);
reg[3:0]ram;
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
ram=4'b0;
end
else if(data_valid)begin
ram<={ram[2:0],data};
end
else begin
ram<=ram;
end
end
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
match<=0;
end
else begin
match<=(ram[2:0]==3'b011)&&data&&data_valid;
end
end
endmoduleZustandsmaschine (Typ MOORE)
Der MOORE-Typ bezieht sich nur auf den aktuellen Status. Daher wird bei der Ausgabe des Urteils ns== verwendet, also der Wert, dem der sekundäre Status entspricht.
Und wenn es MEALY ist, ist es der aktuelle Zustand plus Eingabe
`timescale 1ns/1ns
module sequence_detect(
input clk,
input rst_n,
input data,
input data_valid,
output reg match
);
parameter idle=0,s0=1,s1=2,s2=3,s3=4;
reg[2:0]cs;
reg[2:0]ns;
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
cs<=idle;
end
else begin
cs<=ns;
end
end
always@(*)begin
case(cs)
idle:begin
if(data_valid)
ns=(data==1)?idle:s0;
else
ns=idle;
end
s0:begin
if(data_valid)
ns=(data==1)?s1:s0;
else
ns=s0;
end
s1:begin
if(data_valid)
ns=(data==1)?s2:s0;
else
ns=s1;
end
s2:begin
if(data_valid)
ns=(data==0)?s3:idle;
else
ns=s2;
end
s3:begin
if(data_valid)
ns=(data==0)?s0:idle;
end
endcase
end
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
match<=0;
end
else begin
match<=(ns==s3)?1:0;
end
end
endmoduleZustandsmaschine
Es ist zu beachten, dass die MOORE-Maschine, die den nächsten Zustand bestimmt, weniger als einen Schlag hat und diejenige, die tatsächlich den aktuellen Zustand beurteilt, einen Schlag hat.
Die Moore-Maschine hat einen Zustand mehr als die Mealy-Maschine. Dieser Zustand stellt den Anfangszustand dar.
Der Ausgang der Moore-Maschine wird durch den aktuellen Zustand bestimmt, und der Ausgang der Mealy-Maschine wird durch den aktuellen Zustand und das Eingangssignal bestimmt.
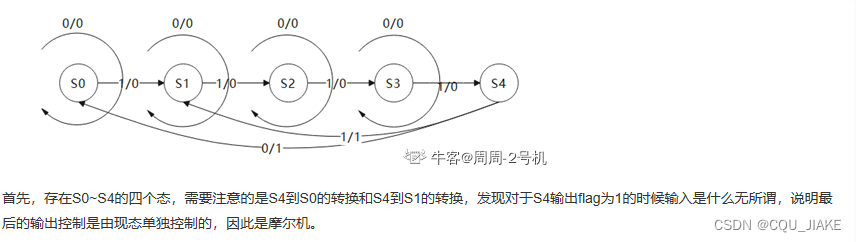
Die endgültige Ausgabesteuerung wird ausschließlich durch den aktuellen Zustand gesteuert, es handelt sich also um eine Moore- Maschine.
Blau stellt den Ausgang dar. Die Moore-Maschine hat schließlich den Zustand S4 hinzugefügt. Aus der Sicht des Zustandsübergangs wird der Ausgangsschlag einen Schlag später sein, aber da es sich um einen kombinatorischen Logikausgang handelt, ist er eigentlich nicht einen Schlag später.
(Dies bedeutet, dass die MOORE-Maschine und die MEALY-Maschine, die den nächsten Zustand beurteilen, die gleiche Ausgabe haben, das heißt, sie geben im gleichen Zyklus aus, und nur die MOORE-Maschine, die den aktuellen Zustand wirklich beurteilt, ist einen Zyklus langsamer.)
Der Unterschied zwischen Moore-Maschine und Miller-Maschine : Der Hauptunterschied besteht darin , ob die Ausgabe der Zustandsmaschine mit dem aktuellen Zustand zusammenhängt . Das Folgende ist ein zweistufiger Ausdruck, um den Unterschied zwischen den beiden zu beschreiben.
Es ist zu beachten, dass bei Verwendung der dreistufigen Beschreibungsmethode der Unterschied zwischen beiden hauptsächlich darin liegt, ob die Beurteilung in der dritten Stufe auf dem aktuellen Zustand oder dem sekundären Zustand basiert.
Die Moore-Zustandsmaschine hat einen Zustand weniger als die Miller-Zustandsmaschine, und die Moore-Zustandsmaschine ist einen Zyklus langsamer; die Miller-Zustandsmaschine verwendet die aktuelle Eingabe und den aktuellen Zustand zur gemeinsamen Beurteilung, während die Moore-Zustandsmaschine keinen Strom benötigt Eingang.
Wenn es sich um eine Moore-Maschine handelt, kann sie in der Ausgabe nur als Sekundärzustand beurteilt werden, das heißt, was der Sekundärzustand ist;
Wenn Sie eine Mahlzeitmaschine wünschen, muss die Ausgabe als Kombination aus dem aktuellen Status und dem Eingangssignal beurteilt werden.
Dies ist eine Mealy-Maschine, da bei der Ausgabe das Ausgangssignal durch den aktuellen Zustand und den Eingang zusammen gesteuert wird.
zweistufig
Die sogenannte zweistufige Formel ist eigentlich eine Schreibweise speziell für die MOORE-Maschine, da die Ausgabe der MOORE-Maschine nur vom aktuellen Zustand abhängt und es dann nur darum geht, den aktuellen Zustand zu beurteilen und dann zu urteilen Was ist der nächste Zustand? Die Ausgabe erfolgt einen Zyklus später und die zweite Stufe. Die Formel besteht darin, den letzten Abschnitt der Ausgabe wegzulassen und ihn in den Zustandsübergang zu integrieren.
Da es sich um eine MOORE-Maschine handelt, wird der Sekundärzustand in der Ausgabe bestimmt. Es ist besser, die Ausgabe direkt im Zustandsübergang zu bestimmen, wenn der Sekundärzustand bestimmt wird.
dreistufig
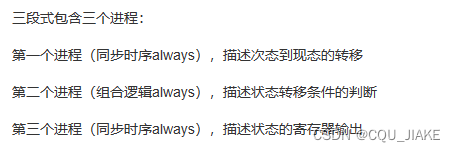
Vom nächsten Zustand zum aktuellen Zustand verwenden Sie posedge,
Verwenden Sie während des Zustandsübergangs immer@(*)
Verwenden Sie beim Exportieren auch posedge
Im ersten und zweiten Prozess wird <= in beiden Prozessen und = im zweiten Prozess verwendet, da sie alle zeitlich synchron sind.
`timescale 1ns/1ns
module fsm1(
input wire clk ,
input wire rst ,
input wire data ,
output reg flag
);
parameter S0 = 'd0, S1 = 'd1, S2 = 'd2, S3 = 'd3 ;
reg [2:0] current_state;
reg [2:0] next_state;
always@(posedge clk or negedge rst)begin
if(rst == 1'b0)begin
current_state <= S0;
end
else begin
current_state <= next_state;
end
end
always@(*)begin
case(current_state)
S0:begin
next_state = data ? S1 : S0;
end
S1:begin
next_state = data ? S2 : S1;
end
S2:begin
next_state = data ? S3 : S2;
end
S3:begin
next_state = data ? S0 : S3;
end
default:begin next_state = S0; end
endcase
end
always@(posedge clk or negedge rst)begin
if(rst == 1'b0)begin
flag <= 1'b0;
end
else begin
if(current_state == S3)begin
if (data) flag <= 1'b1;
else flag <= 1'b0;
end
else begin
flag <= 1'b0;
end
end
end
endmoduleDas ist eine Essensmaschine,