Aprenda a planificar rutas de conducción autónoma desde cero (incluidos Apollo, algoritmos de planificación de software automático, etc., así como algunos algoritmos de control)
Una serie de algoritmos desde la entrada hasta el dominio.
El conjunto completo cubre el siguiente contenido:
前言课
第一节-ros工程的创建
第一节-运行环境和工程目录简介
第二节-工程运行和小车模型搭建简介
第二节-车辆里程计
第三节-整体架构思路
第三节-地图路线构建方法
第三节-参考线平滑函数
第三节-参考线平滑原理(一)
第三节-参考线平滑原理(二)
第四节-lqr控制器、pid控制器、stanley控制器、pure_pursuit控制器代码简介(已添加mpc控制算法)
第五节-局部规划器代码简介
第五节-Frenet坐标系和参考线参数计算
第六节-模拟障碍物的生成函数介绍
第六节-模拟障碍物的生成方法介绍
第六节-障碍物函数类的介绍
第七节-基于Frenet采样规划原理(一)
第七节-基于Frenet采样规划原理(二)
第七节-基于Frenet采样规划原理(三)
第七节-基于Frenet采样规划总结
第七节-基于Frenet采样规划的补充-停止模式
第八节-Lattice规划算法-函数介绍(第八节-Lattice规划算法原理一)
第八节-Lattice规划算法-障碍物的SL图和ST图(一)
第八节-Lattice规划算法-障碍物的SL图和ST图(二)
第八节-Lattice规划算法-巡航模式的速度采样
第八节-Lattice规划算法-超车和跟车速度采样(一)
第八节-Lattice规划算法-超车和跟车速度采样(二)
第八节-Lattice规划算法-横向采样与二次规划
第八节-Lattice规划算法-二次规划(一)
第八节-Lattice规划算法-二次规划(二)
第八节-Lattice规划算法-二次规划(三)
第八节-Lattice规划算法一-代价函数
第八节-Lattice规划算法-合成函数和碰撞检测
第八节-Lattice规划算法效果演示
第九节-Em规划算法-函数介绍
第九节-Em规划算法-路径规划DP介绍
第九节-Em规划算法-路径规划QP函数介绍
第九节-Em规划算法-路径规划QP原理和效果显示
第九节-Em规划算法-速度规划DP介绍
第九节-Em规划算法-速度规划QP介绍
第九节-Em规划算法-效果演示
第十节-混合A星算法(一)
第十节-混合A星算法(二)
第十节-混合A星算法(三)
第十节-混合A星算法(四)
第十节-混合A星算法(五)
第十节-混合A星算法效果演示-泊车场景
第十一节-变道规划算法-变道算法介绍
第十一节-变道规划算法-Lattice超车和跟车效果演示
第十一节-变道规划算法-变道算法决策过程(一)
第十一节-变道规划算法-变道算法决策过程(二)
第十一节-变道规划算法-效果演示
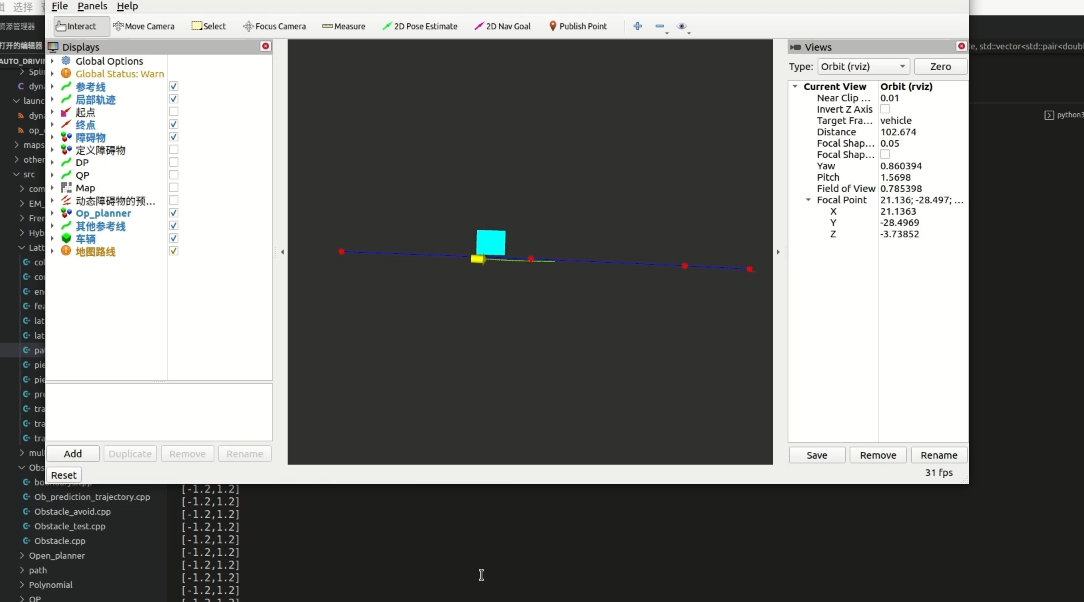
第十二节-open planner规划算法-介绍
第十二节-open planner规划算法-效果演示
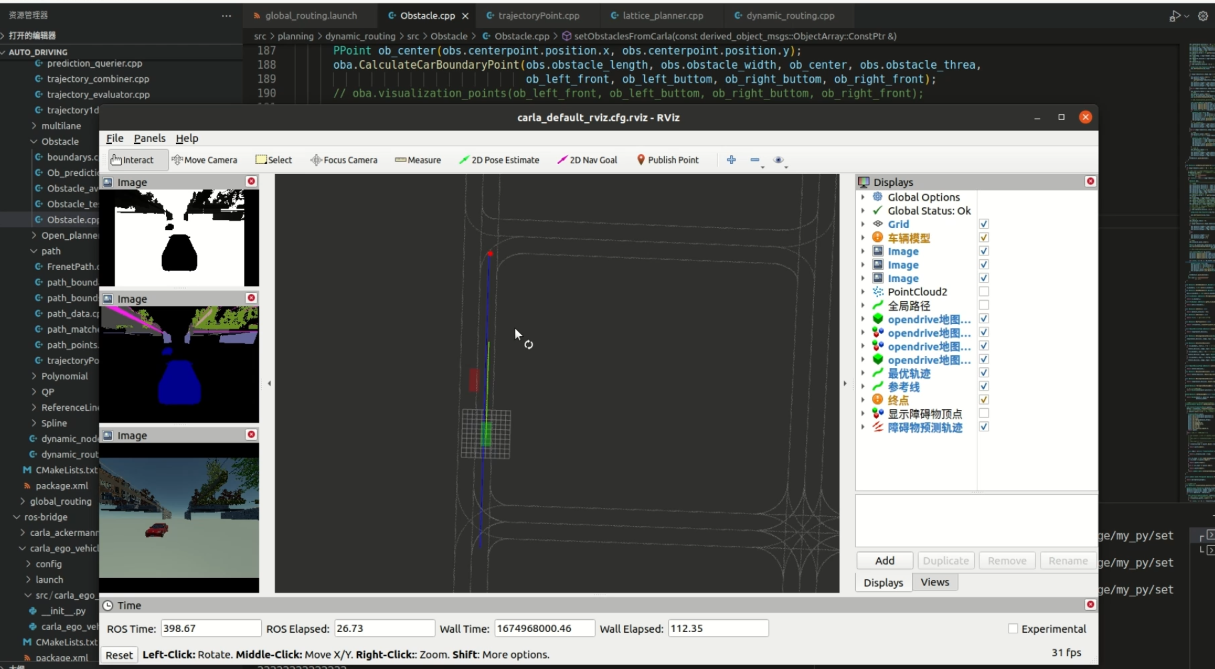
第十三节-carla-ros联合仿真-carla介绍与版本选择
第十三节-carla-ros联合仿真-carla环境配置与运行
第十三节-carla-ros联合仿真-PythonAPI例子介绍
第十三节-carla-ros联合仿真-PythonAPI应用示例
第十三节-carla-ros联合仿真-ros-bridge的介绍
第十三节-carla-ros联合仿真-ros-bridge的使用
第十三节-carla-ros联合仿真-ros-bridge的代码讲解
第十三节-carla-ros联合仿真-ros-bridge的坑
第十三节-carla-ros联合仿真-ros-bridge的演示
第十三节-carla-ros联合仿真-切回ros单独仿真
carla-ros联合仿真-避开静态障碍物
carla-ros联合仿真-跟随动态障碍物
第十四节-Lanelet教程-JOSM的使用(一)
第十四节-Lanelet教程-JOSM的使用(二)
第十四节-Lanelet教程-JOSM的使用(三)
第十四节-Lanelet教程-Lanelet加载osm地图文件
第十四节-Lanelet教程-JOSM画图补充注意点
第十四节-Lanelet教程-参考博文学习
第十四节-Lanelet教程-Lanelet规划模块
第十五节-autoware.ai使用教程-前言课
第十五节-autoware.ai使用教程-docker安装
第十五节-autoware.ai使用教程-源码安装
第十五节-autoware.ai使用教程-demo运行
第十五节-autoware.ai使用教程-carla联合仿真实现规划控制
第十六节-carla泊车场景-dl-iaps优化算法流程简介与效果演示
第十六节-carla泊车场景-dl-iaps优化算法carla实战(待更新)
第十七节-autoware.universe使用教程,ros2(待更新)
El código básico cubre lo siguiente:
前言课
第一节-ros工程的创建
第一节-运行环境和工程目录简介
第二节-工程运行和小车模型搭建简介
第二节-车辆里程计
第三节-整体架构思路
第三节-地图路线构建方法
第三节-参考线平滑函数
第三节-参考线平滑原理(一)
第三节-参考线平滑原理(二)
第四节-lqr控制器、pid控制器、stanley控制器、pure_pursuit控制器代码简介
第五节-局部规划器代码简介
第五节-Frenet坐标系和参考线参数计算
第六节-模拟障碍物的生成函数介绍
第六节-模拟障碍物的生成方法介绍
第六节-障碍物函数类的介绍
第七节-基于Frenet采样规划原理(一)
第七节-基于Frenet采样规划原理(二)
第七节-基于Frenet采样规划原理(三)
第七节-基于Frenet采样规划总结
第七节-基于Frenet采样规划的补充-停止模式
第八节-Lattice规划算法-函数介绍(第八节-Lattice规划算法原理一)
第八节-Lattice规划算法-障碍物的SL图和ST图(一)
第八节-Lattice规划算法-障碍物的SL图和ST图(二)
第八节-Lattice规划算法-巡航模式的速度采样
第八节-Lattice规划算法-超车和跟车速度采样(一)
第八节-Lattice规划算法-超车和跟车速度采样(二)
第八节-Lattice规划算法-横向采样与二次规划
第八节-Lattice规划算法-二次规划(一)
第八节-Lattice规划算法-二次规划(二)
第八节-Lattice规划算法-二次规划(三)
第八节-Lattice规划算法一-代价函数
第八节-Lattice规划算法-合成函数和碰撞检测
第八节-Lattice规划算法效果演示
第九节-Em规划算法-函数介绍
第九节-Em规划算法-路径规划DP介绍
第九节-Em规划算法-路径规划QP函数介绍
第九节-Em规划算法-路径规划QP原理和效果显示
第九节-Em规划算法-速度规划DP介绍
第九节-Em规划算法-速度规划QP介绍
第九节-Em规划算法-效果演示
第十节-混合A星算法(一)
第十节-混合A星算法(二)
第十节-混合A星算法(三)
第十节-混合A星算法(四)
第十节-混合A星算法(五)
第十节-混合A星算法效果演示-泊车场景
第十一节-变道规划算法-变道算法介绍
第十一节-变道规划算法-Lattice超车和跟车效果演示
第十一节-变道规划算法-变道算法决策过程(一)
第十一节-变道规划算法-变道算法决策过程(二)
第十一节-变道规划算法-效果演示
第十二节-open planner规划算法-介绍
第十二节-open planner规划算法-效果演示
第十五节-autoware.ai使用教程-前言课
第十五节-autoware.ai使用教程-docker安装
第十五节-autoware.ai使用教程-源码安装
第十五节-autoware.ai使用教程-demo运行
第十五节-autoware.ai使用教程-carla联合仿真实现规划控制
Consejo: Entre ellos, Lattice, EM y el híbrido A son algoritmos de planificación trasplantados de Apollo. El muestreo doble t y el planificador abierto son algoritmos de planificación trasplantados de autoware. Se trasplantan usando ros1 porque hay mucha información y es fácil comenzar. .
Características de este proyecto:
1. El video del curso trata principalmente sobre la comprensión y explicación lógica del código. El código es liviano y más fácil de entender que el código fuente de Apollo y autoware. Además, el código real es mucho más importante que La teoría. Este proyecto puede ayudar a todos a comenzar. Después de aprender cómo aplicarlo, también es conveniente que todos agreguen sus propias ideas de algoritmos.
2. Hay una comunidad de aprendizaje e intercambio . Además de informar errores y responder preguntas, todos también tienen personas con ideas afines. Puedes inscribirte en la escuela y comenzar a intercambiar tecnologías. Después de estudiar unos años, puedes completar tu graduación. diseño, diseño de cursos, proyectos y trabajos.
3. A diferencia de otros códigos de cursos en el mercado, este proyecto es un conjunto de algoritmos generales en lugar de proyectos de algoritmos dispersos. La ventaja de esto es que es conveniente trasplantarlo a automóviles reales, realizar experimentos de investigación científica y escribir currículums de entrevistas. . Conectarse a un automóvil real es reemplazar el posicionamiento del automóvil real con la información de suscripción del módulo de posicionamiento y reemplazar la información del módulo de detección con información como obstáculos para recibir el automóvil real.
4. Este proyecto es una gran integración. Después de aprender, puede escribirlo en su currículum para enriquecer su experiencia en el proyecto. Es más atractivo que el aprendizaje de algoritmos dispersos.
5. Este proyecto le tomó al autor dos años de experiencia práctica para ayudar a más personas que desean aprender a conducir de forma autónoma a evitar obstáculos y aprender a corregir errores.
6. Este proyecto es principalmente C ++ y la cosimulación también involucra Python.
7. Compra de código fuente disponible + grupo de preguntas y respuestas + video de explicación del código + intercambio de aprendizaje de experiencias de ingeniería
8. El uso de software para automóviles no es el enfoque de la serie, por lo que lo que cubro es solo la punta del iceberg para comenzar. Si desea aprender a fondo sobre el software automático, no se recomienda comprar
9. Este proyecto tiene derechos de autor de software de computadora y es solo para uso personal. Borrar si ya no está en uso
No se recomienda comprarlo si necesitas contenido actualizado con urgencia y necesitas un algoritmo perfecto, porque estoy practicando y las actualizaciones son lentas.
Espero reunir a todos los amigos que están estudiando e investigando la conducción autónoma para comunicarse juntos.
Si necesitas saber más detalles envíanos un mensaje privado.