Descarga del código fuente de la herramienta de calibración:
[2205.14087] OpenCalib: una caja de herramientas de calibración multisensor para conducción autónoma (arxiv.org) ![]() https://arxiv.org/abs/2205.14087 Después de descargar, instalar y compilar. Es posible que encuentre algunos problemas, pero no son graves. En línea La búsqueda debería resolverlo.
https://arxiv.org/abs/2205.14087 Después de descargar, instalar y compilar. Es posible que encuentre algunos problemas, pero no son graves. En línea La búsqueda debería resolverlo.
Aquí tomamos la calibración manual de lidar2camera como ejemplo para ilustrar los pasos:
1. Instale primero las bibliotecas necesarias
- hacer
- opencv 2.4
- propio 3
- PCL 1.9
- Pangolín
Instálelos uno por uno. Hay muchos tutoriales de instalación en Internet. Instalarlos generalmente no es un problema, por lo que no entraré en detalles aquí.
Luego vaya al directorio / lidar2camera/manual_calib y ejecute el siguiente comando
mkdir -p build && cd build
cmake .. && makeLuego ejecute el ejemplo de prueba:
cd ~./manual_calib/
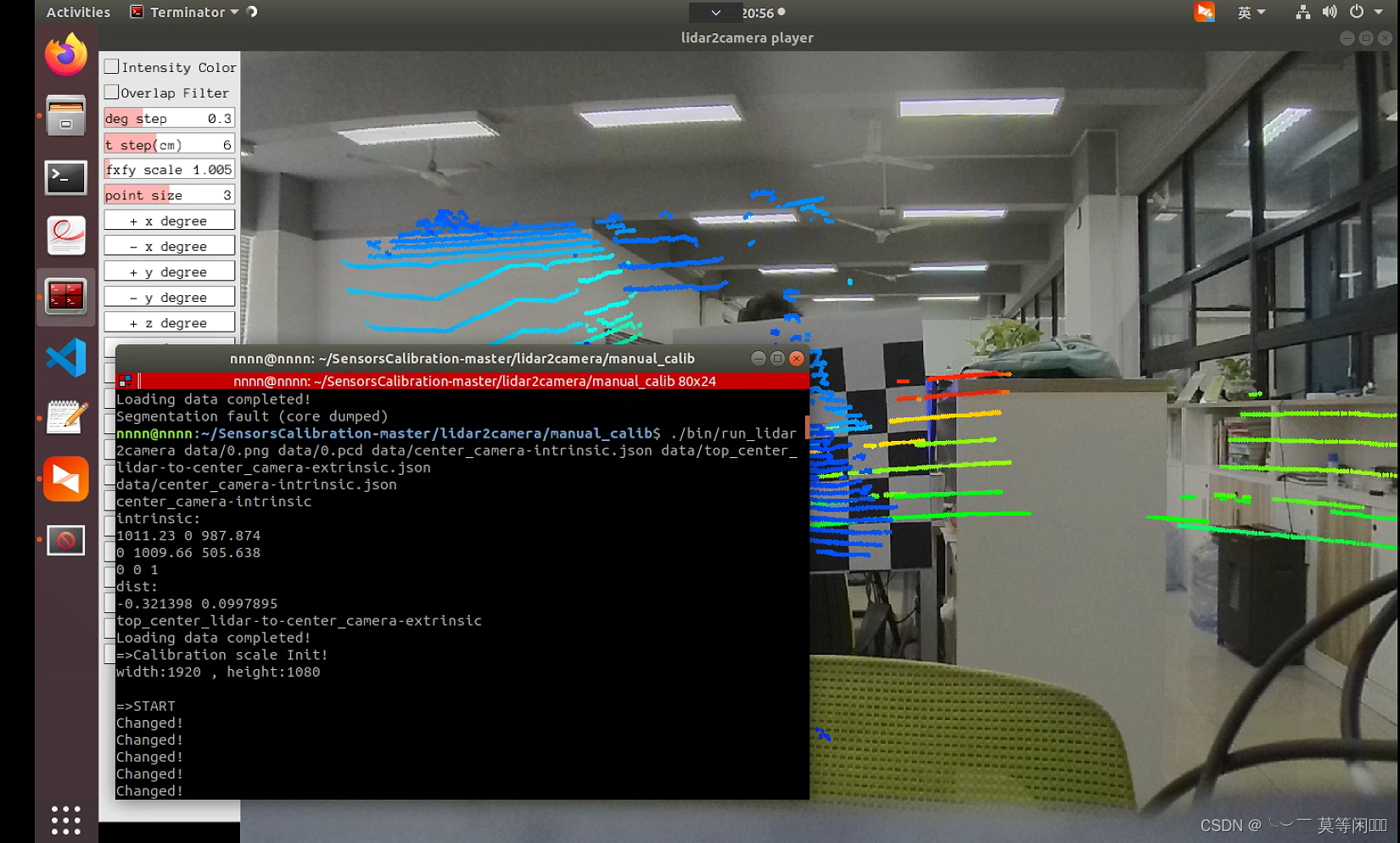
./bin/run_lidar2camera data/0.png data/0.pcd data/center_camera-intrinsic.json data/top_center_lidar-to-center_camera-extrinsic.jsonConsigue el siguiente efecto:

Los pasos anteriores generalmente no representan un gran problema.
Pueden ocurrir algunos problemas al usar sus propios datos para la calibración, como falla de segmentación (núcleo volcado)
Modifique el archivo .cpp en el directorio src y cambie modificacion_lista_[i] = tmp en el archivo a modificación_lista_.push_back(tmp).
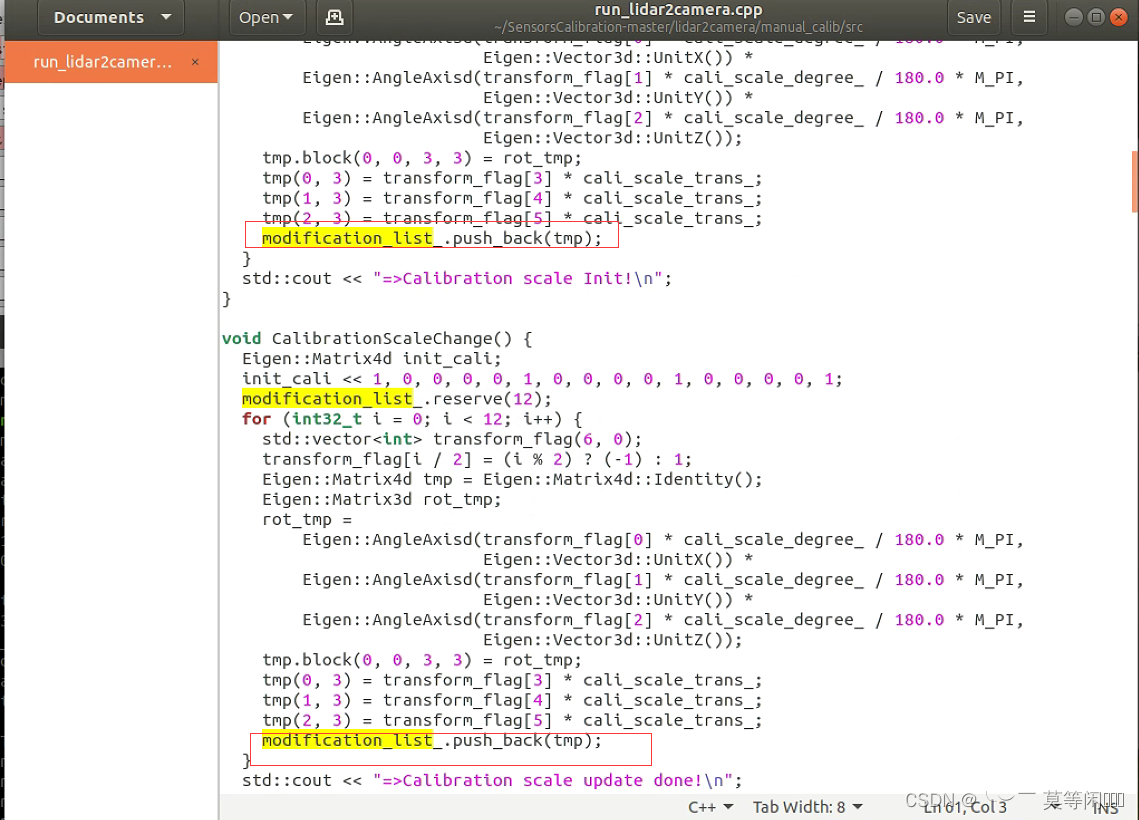
Luego vaya a la carpeta de compilación y vuelva a compilar:
cmake .. && hacer
y luego correr