1. Cambios y comparación de métodos de detección para el aprendizaje de objetivos.
La "detección de objetos" es un punto de investigación actual en el campo de la visión por computadora y el aprendizaje automático. Desde la sabiduría de la era de las armas frías, como Viola-Jones Detector y DPM, hasta la estética violenta de las GPU alimentadas por el aprendizaje profundo como RCNN y YOLO en la actualidad, el desarrollo de toda la detección de objetivos puede describirse como una historia condensada en el campo de la visión por computadora. Todo el proceso de desarrollo de la detección de objetivos se resume en la siguiente figura: 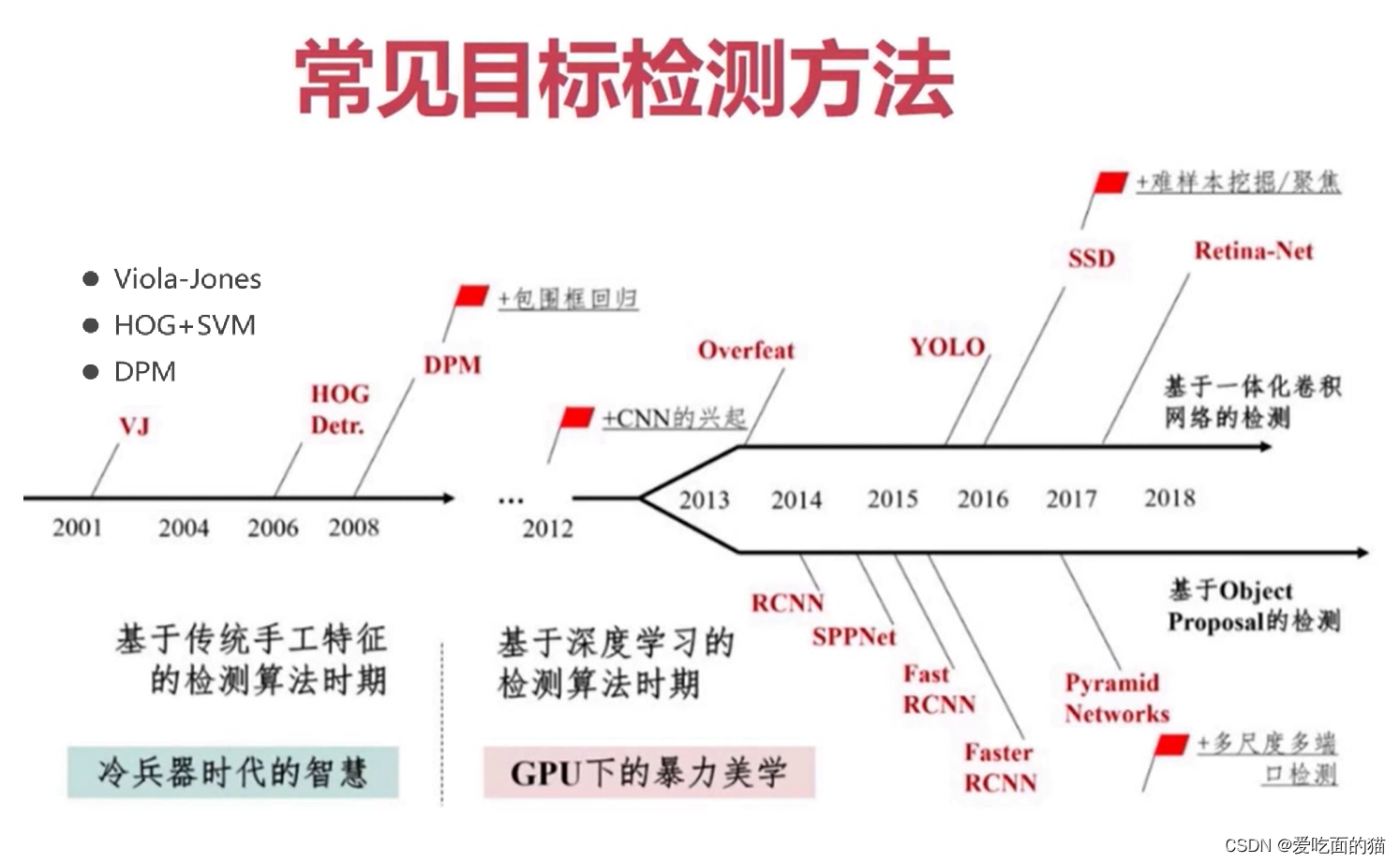
Se puede ver que antes de 2012, el campo de la detección de objetivos todavía estaba dominado por los algoritmos tradicionales de detección de características manuales, pero con el surgimiento de las redes neuronales convolucionales (CNN) en 2012, la detección de objetivos comenzó a utilizar violencia bajo la estética del aprendizaje profundo. En el marco del aprendizaje profundo, el efecto de la detección de objetivos es mucho mejor que el de las funciones manuales tradicionales. Hasta el día de hoy, los algoritmos de detección basados en el aprendizaje profundo siguen siendo la corriente principal de la detección de objetivos.
2. Proceso básico del algoritmo de detección de objetivos de aprendizaje profundo.
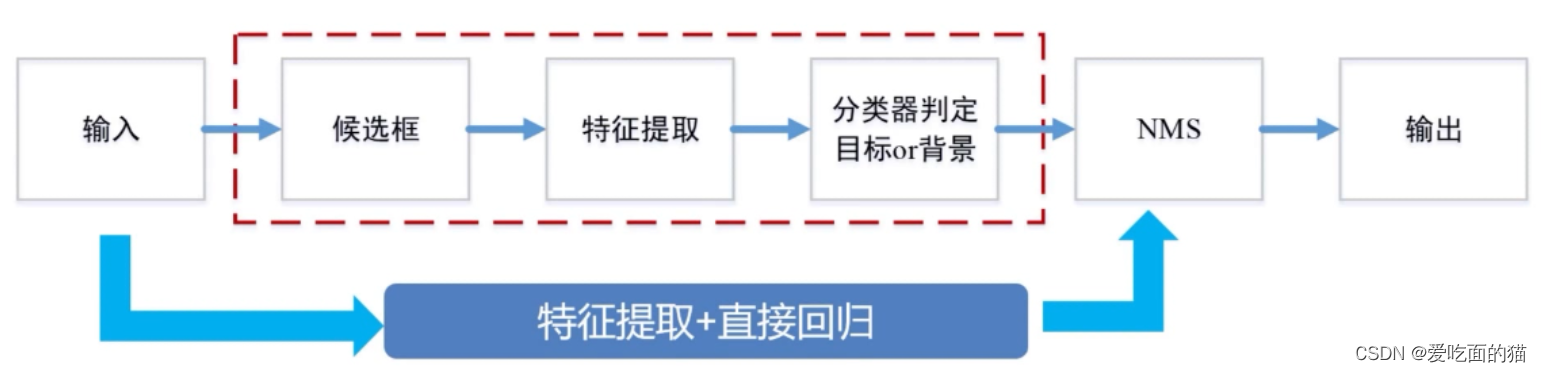
Proceso uno:
Dada una imagen a detectar, esta imagen se usa como entrada del algoritmo de detección, y luego se usa el método de ventana deslizante para extraer cuadros candidatos de la imagen, y luego se realiza la extracción de características en las imágenes en cada cuadro candidato (característica La extracción se basa principalmente en el método de extracción introducido en el conocimiento previo anterior), y utiliza el clasificador para determinar la clasificación de características y obtener una serie de cuadros candidatos para el objetivo de detección actual. Estos cuadros candidatos pueden superponerse. En este caso, el Se utiliza el algoritmo de supresión no máxima NMS. Después de fusionar o filtrar los fotogramas candidatos, el fotograma candidato final es el objetivo de detección final, es decir, el resultado de salida.
Proceso 2:
dada una imagen como entrada, se utiliza el método de extracción de características + regresión del cuadro objetivo para extraer el área objetivo. Finalmente, también se usa NMS para fusionar los cuadros candidatos y finalmente se obtiene el resultado de salida objetivo.
Aviso:
- Proceso 1: aplicable a los métodos tradicionales de detección de objetivos y a los métodos de detección de objetivos basados en el aprendizaje profundo
- Proceso 2: adecuado para métodos de detección de objetivos basados en aprendizaje profundo
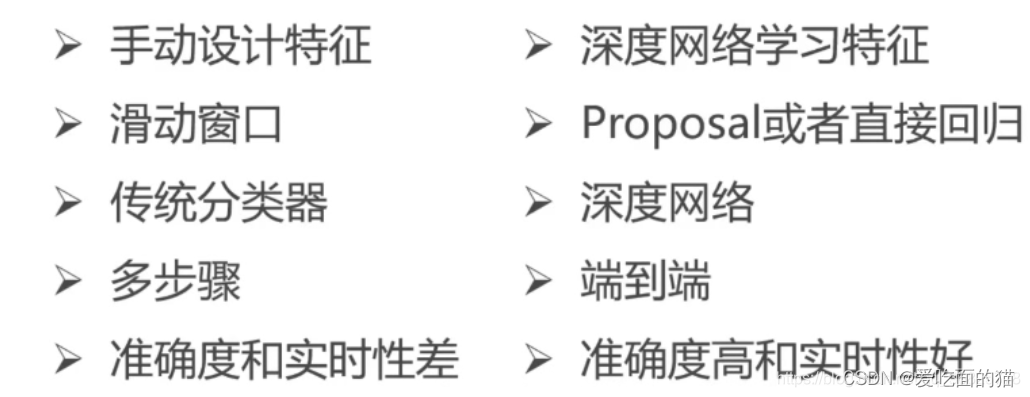
3. Algoritmo de detección de objetivos tradicional versus algoritmo de detección de objetivos de aprendizaje profundo
| Algoritmo de detección de objetivos tradicional | Algoritmo de detección de objetivos de aprendizaje profundo |
| Funciones de diseño manual | Funciones de aprendizaje profundo en red |
| ventana deslizante | Propuesta o devolución directa |
| clasificador tradicional | red profunda |
| múltiples pasos | de extremo a extremo |
| Poca precisión y rendimiento en tiempo real | Alta precisión y buen rendimiento en tiempo real |