Proyecto de graduación "Diseño e implementación de un carro inteligente para recoger pelotas de tenis de mesa basado en STM32" Notas de proceso desde cero
coche real
Prefacio:
Este artículo fue escrito después de la grabación, si hay alguna deficiencia, las críticas y correcciones son bienvenidas.
Si cree que el artículo está bien escrito, puede conectarlo con un clic. (Bi Xin orz)
Tabla de contenido
- Proyecto de graduación "Diseño e implementación de un carro inteligente para recoger pelotas de tenis de mesa basado en STM32" Notas de proceso desde cero
-
- Cero, descarga de datos.
- 1. Compra y aprendizaje de hardware
-
- 1. Lista de hardware
- 2. Introducción a la compra de cada componente
-
- 1) Chasis de carro de doble capa
- 2) Módulo controlador de motor con chip L298N
- 3) 3 baterías de litio de 12V
- 4) Placa base mínima STM32F103C8T6
- 5) Placa de desarrollo Maix Dock (no MAIX-II M2dock)
- 6) Módulo Bluetooth HC-05
- 7) Módulo infrarrojo para evitar obstáculos.
- 8) Descargador de depuración PWLINK2 Lite
- 9) Placa de pruebas MB-102
- 10) Cable Dupont macho a macho, hembra a hembra, macho a hembra, cada fila mide 20 cm de largo.
- 11) Pilar de cobre hexagonal M3 (20 piezas)
- 12) Varilla roscada de cobre, varilla roscada de latón, varilla roscada de rosca completa, varilla roscada completa
- 13) Tuerca hexagonal de acero inoxidable 304 (20 piezas)
- 14) Soporte para trípode de acero inoxidable
- 15) Diodos emisores de luz (5 mm, 50 piezas)
- 16) Junta galvanizada
- 17) Bridas de nailon
- 3. Adquisición y aprendizaje de datos de cada componente
-
- 1) Chasis de carro de doble capa
- 2) Módulo controlador de motor con chip L298N
- 3) 3 baterías de litio de 12V
- 4) Placa base mínima STM32F103C8T6
- 5) Placa de desarrollo Maix Dock
- 6) Módulo Bluetooth HC-05
- 7) Módulo infrarrojo para evitar obstáculos.
- 8) Descargador de depuración PWLINK2 Lite
- 9) Placa de pruebas MB-102
- 10) Diodos emisores de luz (5 mm, 50 piezas)
- 2. Instalación y aprendizaje del software
- 3. Empieza desde cero y ponte manos a la obra
-
- Prefacio
- La primera etapa: compra y construcción de la base de automóviles.
- La segunda etapa: comprar y aprender a usar el controlador de motor L298N
- La tercera etapa: comprar y aprender a usar la placa del sistema mínima STM32F103C8T6
- La cuarta etapa consiste en dejar que el coche se mueva a toda velocidad.
- La quinta etapa PWM regula la velocidad del coche.
-
- 1. Métodos de salida PWM comunes
- 2. Principio de implementación de PWM
- 3. Configuración de señales PWM en STM32CubeMx
- 4. Comprender PWM desde la perspectiva de una fórmula
- 5. Implementar un pequeño experimento sobre cómo respirar luces a través de señales PWM.
- 6. Utilice la simulación de software en keil para comprobar si se emite la forma de onda PWM
-
- 1. Primero configure el entorno de simulación.
- 2. Haga clic en el botón depurar, ingrese depuración y presione ejecutar o F5
- 3. VER->Ventanas de análisis->Analizador lógico abre el analizador lógico
- 4. Agregue la variable de señal PWM a observar.
- 5. Haga clic en Ejecutar a máxima velocidad y observe el osciloscopio.
- 7. Realizar la regulación de la velocidad del automóvil a través de la señal PWM
- La sexta etapa se transforma en un coche con mando a distancia Bluetooth.
- Reconocimiento de Tenis de Mesa Etapa 7
- Etapa 8: aprender a dibujar diagramas esquemáticos
- Etapa 9: la personalización de la placa acrílica requiere dibujos CAD
- Etapa 10: Aprender y utilizar el módulo de evitación de obstáculos por infrarrojos
- Etapa 11: agregar un interruptor a la fuente de alimentación
- Etapa 12: ¿Qué debo hacer si se quema un pin de STM32F103C8T6?
- Reponer
- apéndice
- Pequeñas preguntas para una preparación extra (parte)
Cero, descarga de datos.
Información atómica correcta:
Artículo de referencia: (115 mensajes) Aprenda stm32f103c8t6, cómo descargar y utilizar información del sitio web oficial del blog-CSDN de Zhengdian Atom_quxuexi
otra información:
Enlace: https://pan.baidu.com/s/1u_wxi-8H6zIsLmtEf_jZqw?pwd=2023
Código de extracción: 2023
Descripción de la información: Gracias a Punctual Atom por brindar la información. La información sobre Zhengdian Atom se explica de forma detallada y completa, y su valor nutricional es muy alto, es mucho más importante que este documento. Otra información es principalmente complementaria a la información atómica puntual.
1. Compra y aprendizaje de hardware
1. Lista de hardware
ilustrar:
- La hora de las estadísticas de precios de los componentes es el 27 de mayo de 2023 y las compras reales pueden experimentar ligeros cambios.
- El precio unitario es el coste de comprar uno en Taobao, incluidos los posibles gastos de envío.
- Además de las piezas enumeradas aquí, también necesitarás tijeras, destornilladores y una computadora. (Es mejor tener un soldador eléctrico y un alambre para soldar, pero no importa si no tienes uno)
| número de serie | Nombre del componente | cantidad | precio unitario | precio total |
|---|---|---|---|---|
| 1 | Chasis de carro de doble capa | 1 | 29,8 | 29,8 |
| 2 | Módulo controlador de motor con chip L298N | 1 | 6.8 | 6.8 |
| 3 | 3 baterías de litio de 12V | 1 | 30 | 30 |
| 4 | Placa base mínima STM32F103C8T6 | 1 | 15.4 | 15.4 |
| 5 | Placa de desarrollo Maix Dock | 1 | 205 | 205 |
| 6 | Módulo Bluetooth HC-05 | 1 | 12.2 | 12.2 |
| 7 | Módulo infrarrojo para evitar obstáculos | 3 | 5.1 | 7.8 |
| 8 | Descargador de depuración PWLINK2 Lite | 1 | 9.9 | 9.9 |
| 9 | Placa de pruebas MB-102 | 1 | 3.6 | 3.6 |
| 10 | Cable Dupont macho a macho, hembra a hembra, macho a hembra, una fila cada una de 20 cm de largo | 1 juego | 10.68 | 10.68 |
| 11 | Pilar de cobre hexagonal M3 (20 piezas) | 1 paquete | 2.8 | 2.8 |
| 12 | Varilla de tornillo de cobre, varilla roscada de latón, rosca completa, varilla dentada, rosca completa | 2 palos | 2.3 | 4.6 |
| 13 | Tuerca hexagonal de acero inoxidable 304 (20 piezas) | 1 paquete | 1,72 | 1,72 |
| 14 | Soporte para trípode de acero inoxidable | 1 | 3.5 | 3.5 |
| 15 | Diodos emisores de luz (5 mm, 50 piezas) | 1 paquete | 4.8 | 4.8 |
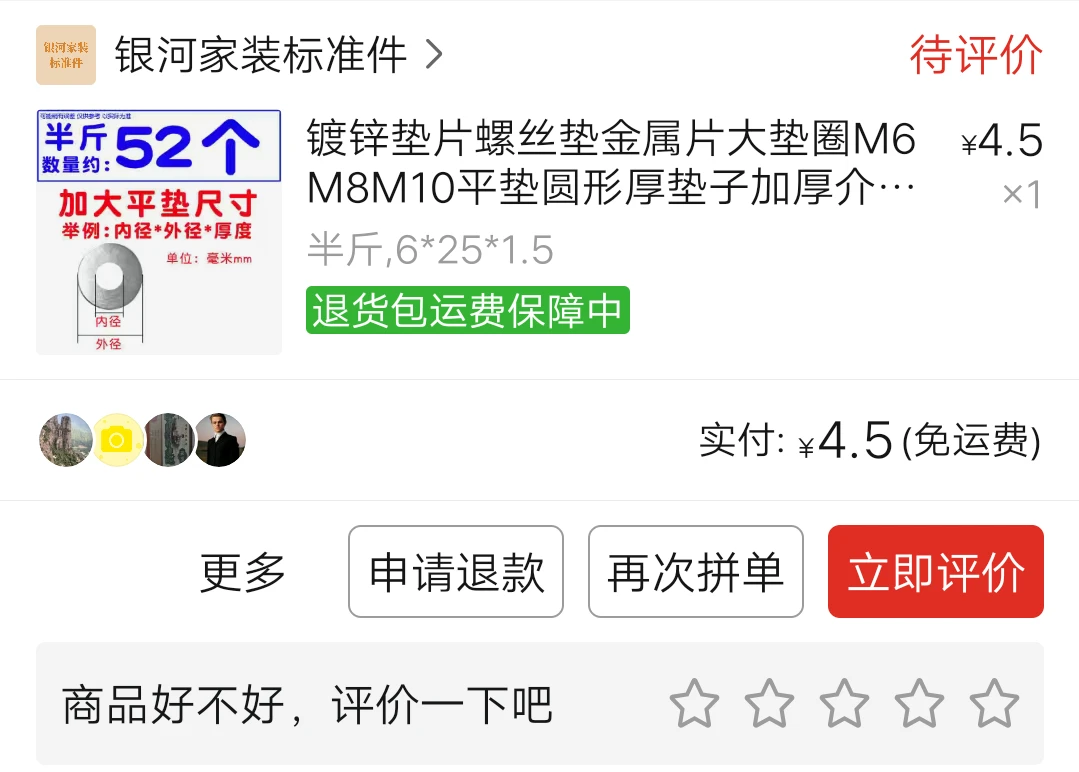
| dieciséis | Junta galvanizada | medio malicioso | 4.5 | 4.5 |
| 17 | Corbata de nailon | 1 paquete | 1.2 | 1.2 |
| total | 342.1 |
2. Introducción a la compra de cada componente
Si desea comprar componentes, le recomiendo copiar directamente los nombres de los componentes en el archivo y buscar en Taobao, y luego buscar aquellos con precios adecuados y buenas críticas para comprar. El enlace de compra en el documento es solo un enlace que compré personalmente en ese momento. Es posible que todavía no tenga excelentes precios y buenas críticas, por lo que animo a todos a comprar en línea de manera científica.
La función más importante de la instantánea de la transacción es la columna "Clasificación de colores". Esa columna explica el nombre, modelo y otros parámetros importantes del artículo comprado. Es una opción de referencia importante al comprar en la tienda del comerciante.
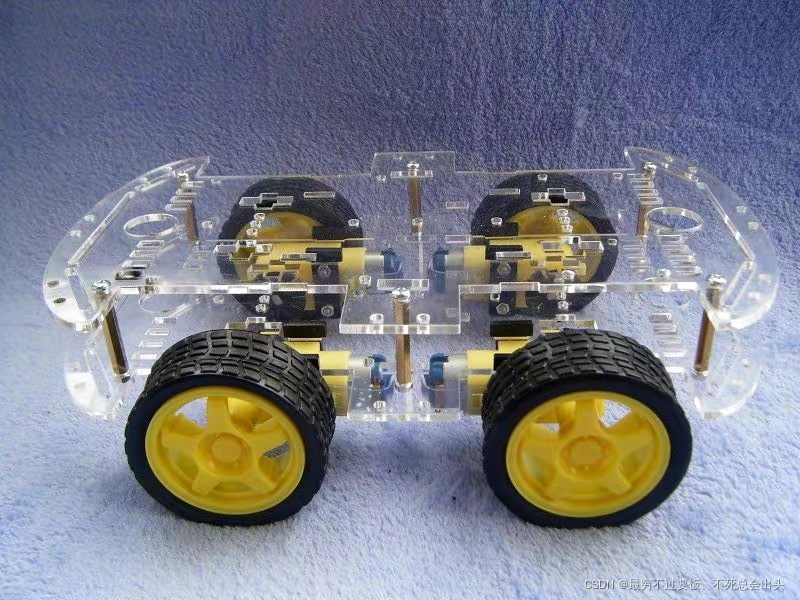
1) Chasis de carro de doble capa
-
Componentes reales:
-
Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): Smart Car Kit 51 MCU/STM32/UNO Placa de desarrollo Seguimiento y evitación de obstáculos Chasis de robot de control remoto - Taobao (taobao.com)
-
Instantánea de la transacción:

-
Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
-
Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
-
Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
-
Nota personal: No hay nada que aprender sobre este componente, simplemente ensamblelo y preste atención a los polos positivo y negativo del motor y al voltaje de alimentación aceptable.
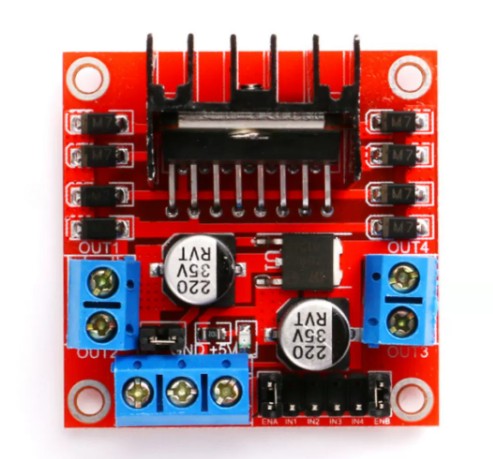
2) Módulo controlador de motor con chip L298N
- Componentes reales:
- Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): Módulo de placa de controlador de motor con chip L298N, microcontrolador de robot de coche inteligente con desaceleración de CC paso a paso red-tmall.com Tmall
- Instantánea de la transacción:

- Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
- Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
- Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
- Nota personal: preste atención al método de alimentación que utiliza este componente, 12 V o 5 V. Preste atención a si se debe desconectar la tapa del puente. Este controlador de motor puede accionar dos motores.
3) 3 baterías de litio de 12V
- Componentes reales:

- Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): Paquete de batería de litio recargable Smart Car 18650, tira de luz LED de gran capacidad de 12 V, luz de enrutador, luz de barra para gato 7,4 - Taobao (taobao.com)
- Instantánea de la transacción:

- Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
- Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
- Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
- Nota personal: en las últimas etapas del proyecto, sentí que podría usar un banco de energía más común para reemplazar la batería de litio, lo que ahorraría mucho dinero. Sin embargo, los métodos de suministro de energía de los dos son diferentes. Si desea utilizar un banco de energía para lograr el mismo efecto que una batería de litio, utilice el cable terminal. Para la fuente de alimentación, también necesita comprar un "cable terminal USB macho a XH2.54-2P".
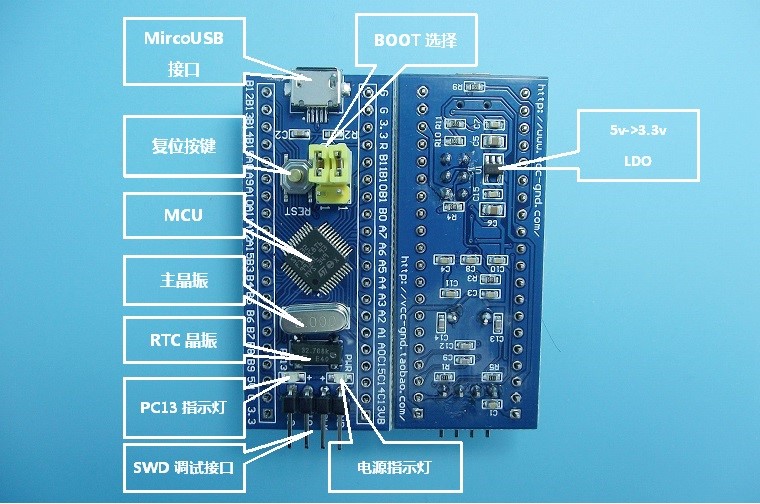
4) Placa base mínima STM32F103C8T6
- Componentes reales:
- Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): Placa central STM32F103C8T6 Placa de desarrollo C6T6 STM32 Placa de experimento de sistema mínimo del microcontrolador ARM - Taobao (taobao.com)
- Instantánea de la transacción:

- Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
- Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
- Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
- Nota personal: compré el que tiene los pines soldados, que es un poco más caro que el que no tiene soldadura, pero ahorra problemas. Tenga en cuenta que la placa debe estar apagada al grabar código. Cuando trabaje, no conecte ciegamente los pines no utilizados. No conecte ningún cable a los cuatro pines para la programación. No use GND entre ellos. Si los pines GND en ambos lados de la placa no son suficientes, use DuPont. Cables o puentes Conecte GND a la placa para aumentar el número de GND. Su método de fuente de alimentación se puede conectar a su pin de 5V usando una fuente de alimentación de 5V, o puede ser alimentado por un puerto Micro. Al usarlo, también debe prestar atención al uso de las dos tapas de puente y si es necesario desenchufarlas.
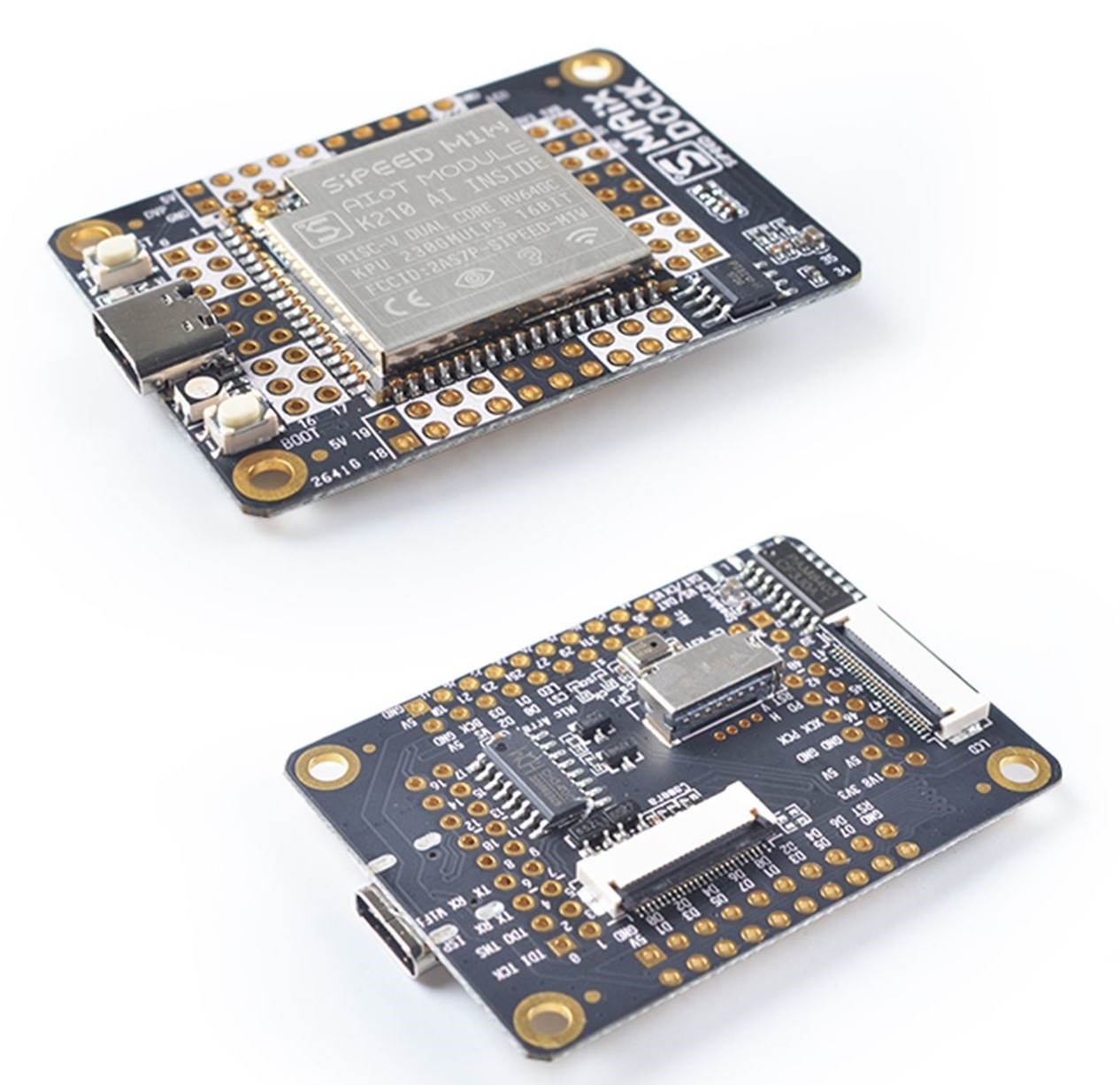
5) Placa de desarrollo Maix Dock (no MAIX-II M2dock)
-
Componentes reales:
-
Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): Sipeed Maix Dock K210 AI+lOT Deep Learning Vision Development Board-Taobao (taobao.com)
-
Instantánea de la transacción:

-
Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
-
Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
-
Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
-
Nota personal: solo lo uso para identificar pelotas de tenis de mesa y luego, después de una serie de procesamientos (implementados escribiendo programas internos), me comunico con STM32 a través del puerto serie. El método de alimentación que utilicé fue la fuente de alimentación por micropuerto. Al principio también usé el pin de 5V para alimentarlo, pero luego descubrí que después de trabajar por un tiempo, el chip se quedó sin energía y no pudo funcionar normalmente. Simplemente usé el cargador directamente más tarde, enciéndalo a través del puerto Micro.
-
¿Por qué elegir esta placa de desarrollo? El proceso es un poco dramático, echemos un vistazo a algunas presentaciones de productos de MAIX: descripción general del producto de código abierto Sipeed - Sipeed Wiki . También me preguntaba cuál elegir. Al principio, primero pensé en usar openMV para identificar pelotas de tenis de mesa. Más tarde, le pregunté al profesor y le dije que la instalación no fue reembolsada y que openMV era muy caro (frecuentemente más de 300, 500+), así que pensé. Después de cambiar la placa, accidentalmente vi a alguien decir que k210 puede reemplazar a openmv y que la potencia de cálculo es aún mayor, así que quise comprar k210. Los productos de la serie MAIX utilizan k210, que es la serie Maix-I, así que estaba pensando en elegir uno de la serie Maix-I. En ese momento, consideré principalmente el Sipeed Maix Bit Sipeed Maix Bit RISC-V AI+lOT K210 Placa de pruebas de conexión directa Kit de placa de desarrollo: Taobao (taobao.com) y Sipeed Maix Dock Placa de desarrollo visual de aprendizaje profundo Sipeed Maix Dock K210 AI+lOT: Taobao (taobao.com) Los precios de los dos son aproximadamente iguales, ambos son alrededor de 185r. Lo vi por casualidad más tarde. Un artículo: (113 mensajes) Notas de estudio de MaixII-Dock (v831) - primera introducción a v831_The Cat en el Blog de Cardboard - Blog de CSDN Dijo que el Dock es bueno, así que lo compré el muelle de Sipeed Maix. No lo vi claramente en ese momento, pero en realidad decía MaixII-Dock (v831), oye, lo golpeé accidentalmente.
Hay M1 Dock y M1W Dock en el enlace de compra. La diferencia entre ellos es que M1W Dock tiene un módulo WIFI más que M1 Dock, por lo que el precio es 15r más caro.
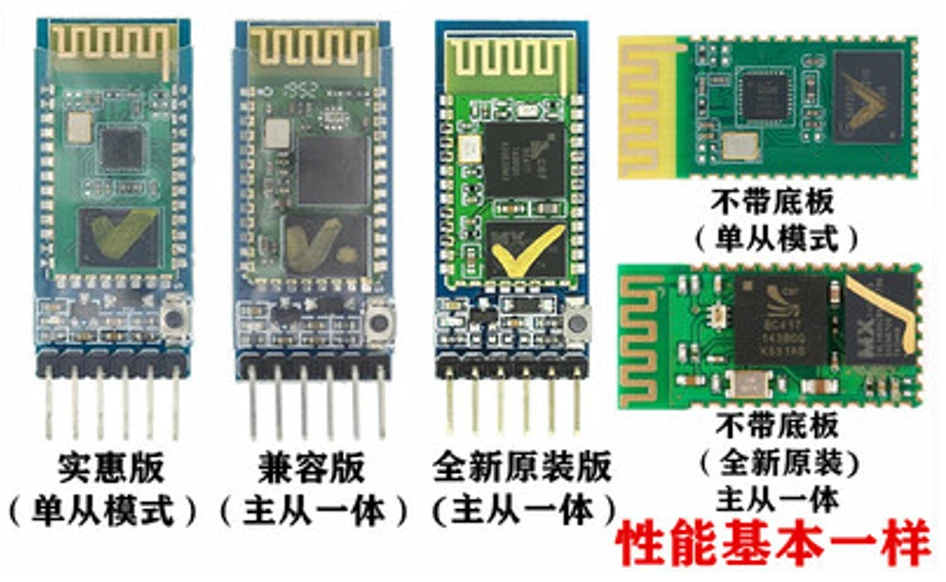
6) Módulo Bluetooth HC-05
-
Componentes reales:
-
Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): Módulo Bluetooth integrado maestro-esclavo HC-05 con placa base, puerto serie inalámbrico comunicación de transmisión transparente Módulo Bluetooth HC-05 - Taobao (taobao .com)
-
Instantánea de la transacción:

-
Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
-
Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
-
Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
-
Nota personal: HC-05 tiene tres modelos: versión compatible, versión original y versión asequible. La versión asequible es la más barata, pero solo se puede conectar a otros dispositivos Bluetooth como esclavo y no se puede conectar activamente a otros dispositivos Blue Night. Este es el modo esclavo único; tanto la versión compatible como la versión original se pueden usar como un host para conectarse a otros dispositivos Bluetooth, o como esclavo. Estar conectado por otros dispositivos Bluetooth es el modo maestro-esclavo. La diferencia es que la versión compatible es más barata que la versión original porque no es un componente genuino.
HC-05 es un módulo de puerto serie Bluetooth comúnmente utilizado para comunicación inalámbrica. La diferencia entre la versión compatible y la versión original es:
-
La versión original se refiere al módulo producido por el fabricante original de HC-05 y la versión compatible se refiere al módulo compatible producido por otros fabricantes.
-
En términos de función, no hay diferencia entre la versión original y la versión compatible, ambas pueden realizar comunicación serial Bluetooth.
-
En apariencia, puede haber algunas diferencias entre la versión original y la versión compatible, como tamaño, color, etc.
-
En cuanto al precio, las versiones compatibles suelen ser más económicas que las originales.
Cabe señalar que, dado que la versión compatible es producida por otros fabricantes, su calidad y estabilidad pueden ser diferentes, por lo que al elegir, debe prestar atención a la elección de productos de fabricantes habituales.
Si Bluetooth solo se usa para esperar pasivamente a que se conecten otros dispositivos, puede elegir la versión asequible y comprar la versión asequible para este proyecto.
Antes de usarlo, debe configurar este componente, ingresar a la configuración del modo AT, configurar la velocidad en baudios, etc.
-
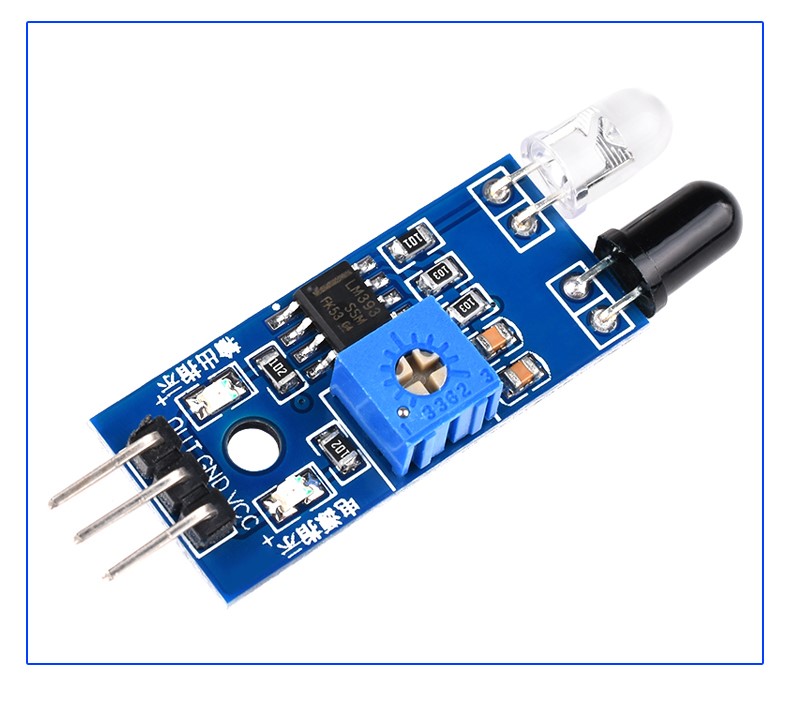
7) Módulo infrarrojo para evitar obstáculos.
- Componentes reales:
- Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): Módulo de barrera infrarroja/sensor para evitar obstáculos del automóvil para evitar obstáculos/interruptor fotoeléctrico ajustable de distancia de reconocimiento de línea blanca y negra - Taobao (taobao.com)
- Instantánea de la transacción:

- Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
- Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
- Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
- Nota personal: hay un tornillo en forma de cruz en el cubo azul de arriba. Gírelo para ajustar la distancia de detección de infrarrojos. Sin embargo, la precisión del componente puede no ser alta porque, después de todo, es barato.
8) Descargador de depuración PWLINK2 Lite
- Componentes reales:

- Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): PowerWriter PWLINK2 Core Creation Workshop Simulación STM32 Burning Stlink Debugging GD32 Downloader-tmall.com Tmall
- Instantánea de la transacción: [Error en la transferencia de la imagen del enlace externo. El sitio de origen puede tener un mecanismo anti-leeching. Se recomienda guardar la imagen y cargarla directamente (img-9tXZMr06-1688999686627) (https://article.biliimg.com/ bfs/article/ad182f8fe94afed9213f7b832730368d9f476a66.png)]
- Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
- Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
- Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
- Nota personal: cuando lo compré, todavía costaba 9,9 yuanes, pero ahora el precio ha aumentado inesperadamente. Pero si buscas esa tienda insignia, sigue siendo 9,9 yuanes. Al grabar código, es necesario configurar algunos parámetros en la varita mágica en keil. Al depurar el puerto serie de Bluetooth, debido a que Bluetooth necesita estar conectado a un VCC de 5 V, el VCC de PWlink lite admite dos voltajes de salida, 3,3 V y 5 V. La salida predeterminada es de 3,3 V. Si desea que emita 5 V, puede configure la grabadora con la que viene en el software de grabación.

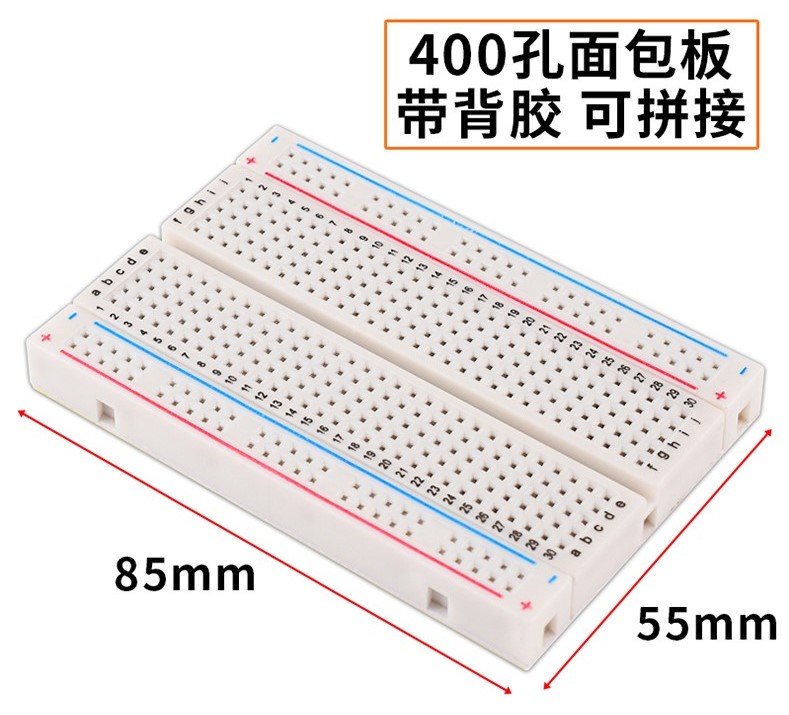
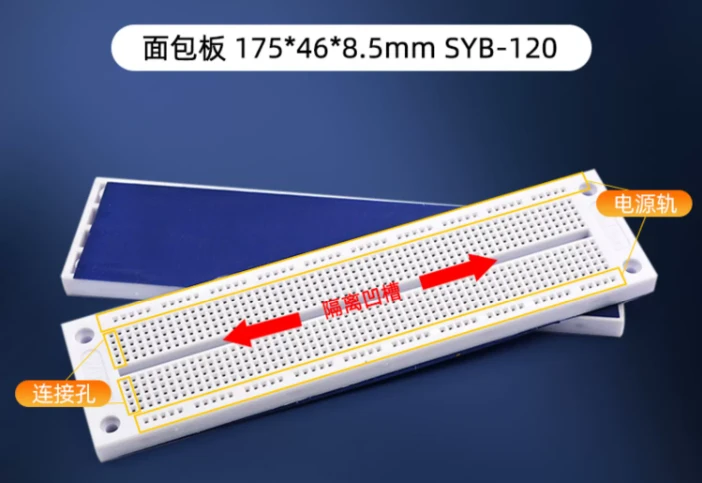
9) Placa de pruebas MB-102
-
Componentes reales:
-
Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): Placa de pruebas MB-102, 65 líneas Dupont, placa de desarrollo de 830 orificios, módulo de potencia, kit de experimentos electrónicos de bricolaje 400-tmall.com Tmall
-
Instantánea de la transacción:

-
Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
-
Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
-
Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
-
Nota personal: este tipo de placa de pruebas puede conectar directamente el STM32F103C8T6. No compre el de la imagen. Compré este tipo de placa de pruebas al principio, pero no podía enchufar el STM32. Después de preguntarle al cliente servicio, dijo que este tipo de placa es para enchufar cables y jumpers de DuPont:
-
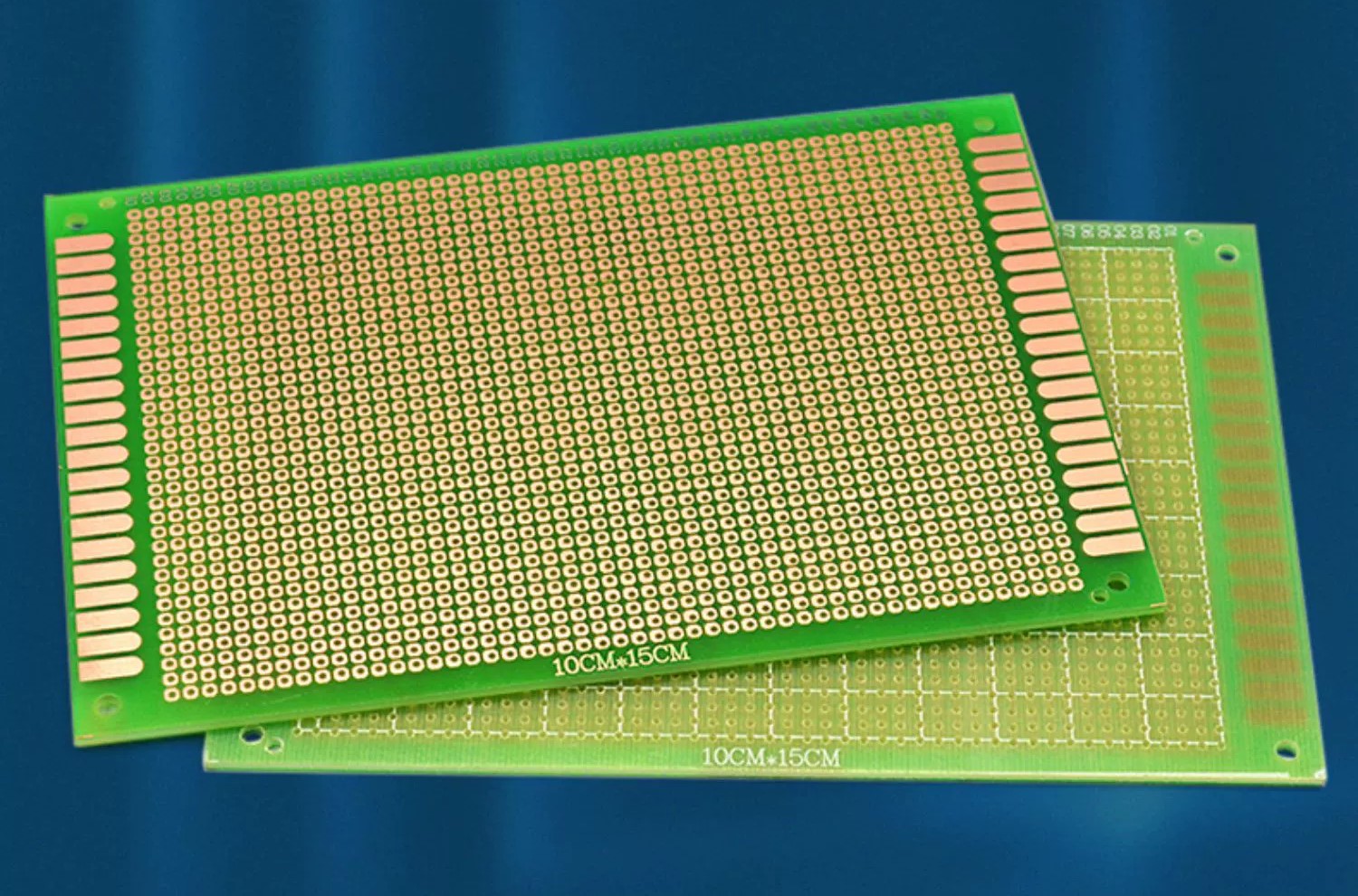
Placa de circuito del tablero del agujero
¿Cuál es la diferencia entre placa de circuito perforada y placa de pruebas?
Tanto las placas de circuito perforado como las placas de pruebas son herramientas de uso común en la creación de prototipos electrónicos.
La placa de circuito perforada es una placa de circuito basada en una placa de fibra de vidrio. Su superficie tiene muchos orificios pequeños a través de los cuales se pueden insertar componentes electrónicos en la placa de circuito y conectarlos mediante soldadura. Las placas de circuito con placa perforada son adecuadas para diseños de circuitos que requieren cableado de alta densidad, pero requieren soldadura manual y un ciclo de producción largo.
Una placa de pruebas es una placa de circuito basada en una placa de plástico con muchos orificios pequeños en su superficie a través de los cuales se pueden insertar componentes electrónicos en la placa de circuito y conectarse a través de enchufes. La placa de pruebas es adecuada para la creación rápida de prototipos, no requiere soldadura y tiene un ciclo de producción corto.
En general, las placas de circuito perforadas son adecuadas para diseños de circuitos que requieren cableado de alta densidad, mientras que las placas de pruebas son adecuadas para la creación rápida de prototipos.
10) Cable Dupont macho a macho, hembra a hembra, macho a hembra, cada fila mide 20 cm de largo.
- Componentes reales:

- Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): Cable DuPont hembra a hembra macho a hembra macho a macho Cable de color 40P cable de conexión macho a bus 10/30/20/40CM-tmall .com
- Instantánea de la transacción:

- Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
- Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
- Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
- Nota personal: La longitud de 20 cm es suficiente. No es necesario romperlo en pedazos uno por uno cuando lo use. Por ejemplo, al conectar el módulo Bluetooth, necesita cuatro cables DuPont. Puede arrancar cuatro cables desde la parte superior. al mismo tiempo, para que no se vea desordenado.
11) Pilar de cobre hexagonal M3 (20 piezas)
- Componentes reales:

- Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): Pilar de cobre hexagonal M3M4M5M6, chasis de perno de cobre de un solo cabezal, placa base, pilar de tornillo, pilar de cobre, soporte de pilar de aislamiento M2M2.5-tmall.com Tmall.
- Instantánea de la transacción:

- Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
- Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
- Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
- Nota personal: Los postes hexagonales de cobre se utilizan para fijar otros componentes, como los agujeros perforados en el carro son de 3 mm, compré unos de 3 mm.
12) Varilla roscada de cobre, varilla roscada de latón, varilla roscada de rosca completa, varilla roscada completa
- Componente físico: [Error en la transferencia de la imagen del enlace externo. El sitio de origen puede tener un mecanismo anti-leeching. Se recomienda guardar la imagen y cargarla directamente (img-QyDwiNpt-1688999686634) (C:/Users/zhouxin/Documents/study Aprendizaje/Ciencias de la Computación y Tecnología (integrado)] materiales de estudio de cuatro años/último año/proyecto de graduación/plantilla de diseño de graduación 2023 (como referencia)/materiales de diseño de graduación/imagen de inserción de tesis de posgrado/imagen del componente real/alambre de cobre.jpg)
- Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): alambrón de cobre, varilla roscada de latón, varilla roscada de rosca completa, perno de rosca completa M3M4M5M6M8M10M12M14-Taobao.com (taobao.com)
- Instantánea de la transacción:

- Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
- Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
- Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
- Nota personal: Un alambrón de cobre se usa como eje central del rodillo del carro y el otro se usa para atarlo al carro, compré dos de ellos para entrega urgente. Está bien comprar solo uno, pero debes pensar en otra forma de fijar el otro extremo al carro.
13) Tuerca hexagonal de acero inoxidable 304 (20 piezas)
- Componentes reales:

- Enlace de compra (puede buscar según el nombre del componente en Taobao, teniendo en cuenta el precio y las ventas): Tuercas, pernos, tuercas, tapas de tornillos hexagonales de acero inoxidable 304 316, M3M4M5M6M8M10M12M33-tmall.com Tmall.com
- Instantánea de la transacción:

- Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
- Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
- Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
- Nota personal: Las tuercas hexagonales se utilizan principalmente en el rodillo para fijar las placas acrílicas transparentes en ambos lados.
14) Soporte para trípode de acero inoxidable
- Componentes reales:

- Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): Soporte de trípode de acero inoxidable engrosado, estante de almacenamiento, soporte de pared, soporte de partición de estante, estante de nueve bits, estantería para colgar en la pared - Taobao (taobao.com)
- Instantánea de la transacción:

- Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
- Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
- Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
- Nota personal: La compra del marco de soporte fue un poco inesperada. Originalmente quería comprar el marco de soporte como soporte con ruedas, luego personalicé un soporte con rodillos acrílico y no usé este soporte de hierro. Pero cuando uso Maix Dock para identificar pelotas de tenis de mesa, necesito colocar la cámara más arriba, así que uso la cámara instalada en este soporte.
15) Diodos emisores de luz (5 mm, 50 piezas)
- Componentes reales:

- Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): Búsqueda de diodo emisor de luz_Taobao (taobao.com)
- Instantánea de la transacción:

- Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
- Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
- Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
- Nota personal: este componente se puede usar para experimentos con lámparas de respiración y también se puede usar para detectar si un determinado pin de alimentación tiene energía. Tenga cuidado de no utilizar un voltaje de 5 V para conectar un diodo emisor de luz. Se quemará tan pronto como lo conecte. Puede ver que solo parpadea una vez y luego se apaga. Entonces el diodo se apaga para siempre. Originalmente compré diodos emisores de luz principalmente para probar si un determinado puerto GPIO generaría un nivel alto, principalmente para conectar las cuatro líneas del controlador del motor. Es fácil que dañe algunos puertos GPIO de STM32. Necesito este método para detectar si ese pin es bueno.
16) Junta galvanizada
- Componentes reales:

- Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): Junta galvanizada_Búsqueda de Taobao (taobao.com)
- Instantánea de la transacción:
- Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
- Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
- Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
- Nota personal: Las juntas galvanizadas también se utilizan para fijar dos placas acrílicas transparentes. Al principio hice algunas juntas con tapas de botellas de Coca-Cola, pero descubrí que las juntas de plástico se deforman fácilmente y afectan la forma del rodillo, así que las hice. Compré duro espaciadores de hierro.
17) Bridas de nailon
- Componentes reales:

- Enlace de compra (puede buscar en Taobao según el nombre del componente, teniendo en cuenta el precio y las ventas): 3*100 bridas para cables transparentes, bridas para cables de nailon, 4x200 tiras de sujeción con hebilla de plástico, potentes perros cansados de gran tamaño - Taobao (taobao. com)
- Instantánea de la transacción:

- Función del componente: consulte "Detalles del bebé" en la página del producto Taobao
- Instrucciones de uso: consulte "Detalles del bebé" en la página del producto Taobao.
- Materiales de aprendizaje: consulte "Detalles del bebé" en la página del producto Taobao
- Nota personal: Las bridas para cables se utilizan principalmente para fijar algunas piezas y son artículos desechables.
3. Adquisición y aprendizaje de datos de cada componente
1) Chasis de carro de doble capa
Comience ensamblando el automóvil. Antes de ensamblar, puede descargar el "Adjunto 1 - Documento de instrucciones de instalación de la base del automóvil.pdf" en "3. Adquisición y aprendizaje de cada componente. Conexión de datos " para tener una visión general de los pasos de instalación del coche, pero no lo hagas todavía Instalación, debido a que el motor aún no ha sido cableado, no es conveniente soldar cables de cobre al motor después del montaje. Lo mejor es utilizar un cable de cobre más largo para soldar, simplemente utilice un cable DuPont macho a macho de 20 cm.
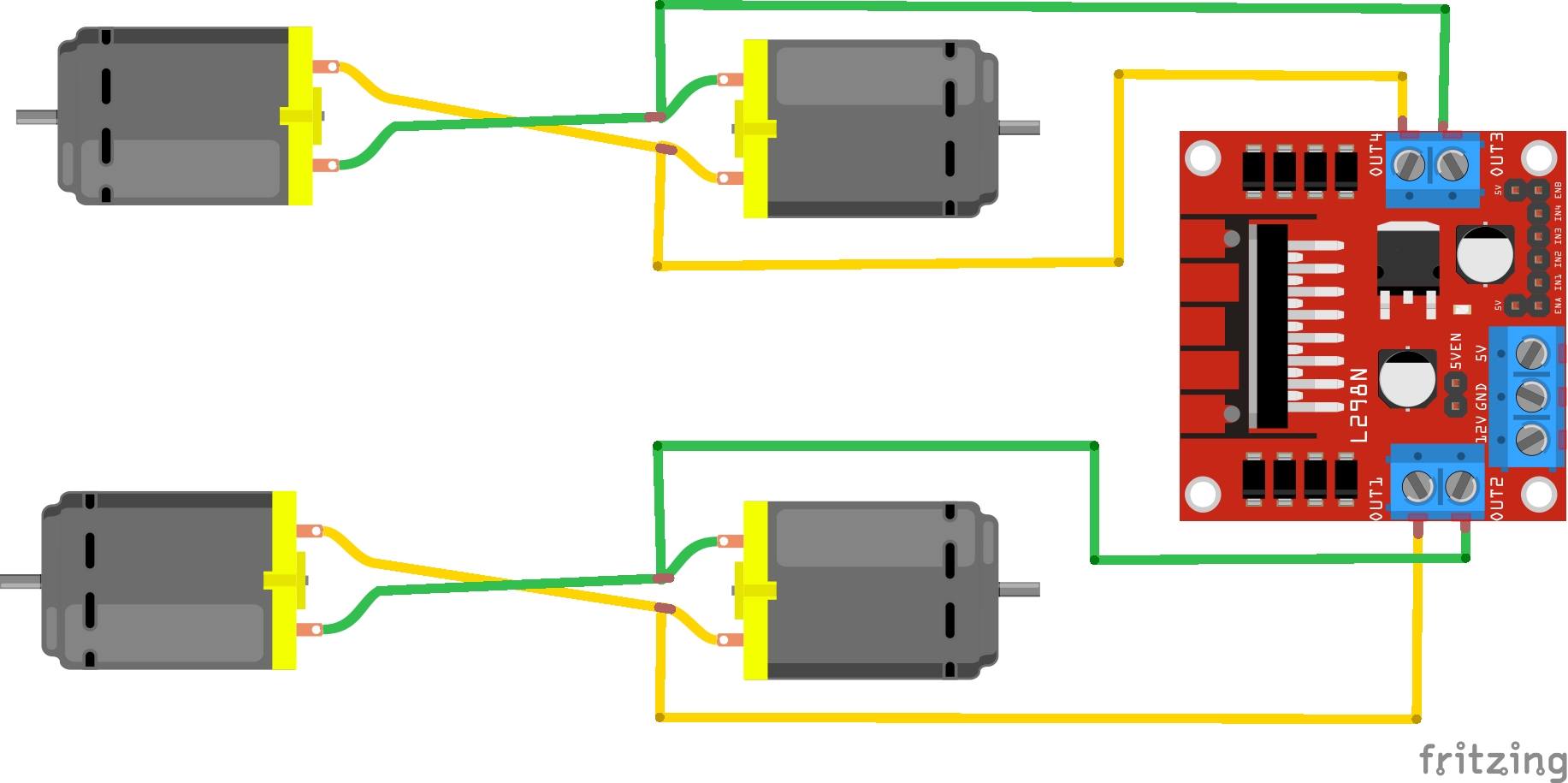
Solo compramos un controlador de motor, que solo puede accionar dos motores, por lo que necesitamos conectar los motores en el mismo lado en serie para que funcionen sincrónicamente.
Suelde el cable de cobre al motor:
Si no tiene un soldador o soldadura, puede comprarlo o puede atar el cable de cobre directamente en el orificio de cobre del motor. Sin embargo, esto tiene riesgos potenciales para la seguridad. Es mejor envolverlo con una capa. de cinta aislante.
Después de conectar los cables de cobre al motor, comience a ensamblar la base del automóvil.

En este punto ya está hecha la parte base del coche.
2) Módulo controlador de motor con chip L298N
Los materiales de aprendizaje para este componente provienen de
El diagrama esquemático del circuito de L298N se puede descargar desde "3. Adquisición de datos y aprendizaje de cada componente. Conexión de datos"
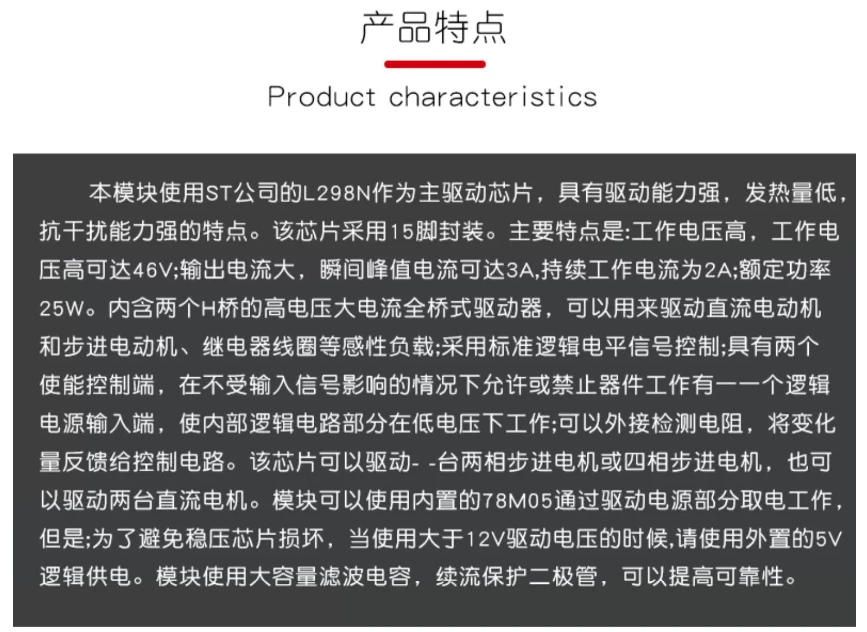
Aquí sólo nos importa la penúltima frase.
"El módulo puede utilizar el 78M05 incorporado para extraer energía de la fuente de alimentación de conducción. Sin embargo, para evitar daños al chip regulador de voltaje, cuando utilice un voltaje de conducción superior a 12 V, utilice una fuente de alimentación lógica externa de 5 V. "
L298N es un chip controlador de puente H dual que puede controlar la dirección de rotación y la velocidad de un motor de CC o un motor paso a paso. El 78M05 es un chip regulador de voltaje que puede generar de manera estable el voltaje de entrada a un voltaje CC de 5 V. En L298N, la función de 78M05 es proporcionar una fuente de alimentación estable de 5 V al chip para garantizar el funcionamiento normal del chip. Al mismo tiempo, el 78M05 también puede proporcionar fuente de alimentación de 5 V para circuitos externos, como circuitos de control o sensores.
"Cuando utilice un voltaje de conducción superior a 12 V, utilice una fuente de alimentación lógica externa de 5 V". ¿Qué significa esta frase?
Lo que esta frase significa es que el módulo L298N puede obtener energía de la parte de potencia motriz a través del chip estabilizador de voltaje 78M05 incorporado, pero cuando se usa un voltaje de conducción superior a 12 V, el chip estabilizador de voltaje incorporado puede dañarse. Para evitar esta situación, se debe utilizar una fuente de alimentación lógica externa de 5 V para garantizar el funcionamiento normal del chip regulador de voltaje. En pocas palabras, para proteger el chip estabilizador de voltaje del módulo L298N, se debe proporcionar una fuente de alimentación lógica adicional de 5 V cuando se utiliza una fuente de alimentación de conducción de alto voltaje.
Si no lo entiendes, echa un vistazo a la explicación a continuación.
Varios métodos de suministro de energía de L298N.
1. Utilice voltaje de 5 V para alimentar el L298N
: Tanto los 12 V como los 5 V del L298N están conectados a la fuente de alimentación de 5 V. GND no solo debe conectarse a GND de la fuente de alimentación de conducción (si está conectado a otros microcontroladores u otros sistemas, debe sacarse desde aquí) Se conecta un GND al GND del microcontrolador o sistema para que el voltaje tenga un nivel de referencia), como se muestra a continuación
[La transferencia de la imagen del enlace externo falló. El sitio de origen puede tener un mecanismo anti-leeching. Se recomienda guardar la imagen y cargarla directamente (img-h6BozVB0-1688999686643)(https://article.biliimg.com/bfs/ artículo/b66cbc902d55a807e4b5ba9d888b650a3cf30f00.png)]
(No se recomienda este método, ya que el voltaje suministrado puede ser pequeño y la velocidad del motor puede ser insuficiente)
Aunque no se recomienda, si debe probarlo, puede probar su propio banco de energía en lugar de la batería de litio de 12 V antes de comprar una batería de litio de 12 V, pero deberá comprar un cable de terminal USB macho a XH2.54-2P adicional. . , concretamente mostrado en la "cuarta etapa de hacer que el coche se mueva a toda velocidad" .
Instantánea de la transacción:

Enlace de compra: Cable de terminal USB macho a XH2.54-2P Fuente de alimentación de 2 núcleos Conector USB a cable de alimentación de terminal PH2.0mm - Taobao (taobao.com)
El voltaje de salida de un power bank que se compra normalmente es de 5 V. Aunque el power bank tiene dos puertos USB, sus voltajes de salida son los mismos, ambos son de 5 V. La diferencia es que uno tiene una corriente de 1 A y el otro tiene una corriente de 2 A. Recuerda utilizar el puerto USB 2A.
El voltaje de funcionamiento del módulo L298N es generalmente de 5 V-35 V y la corriente máxima es de 2 A. Si utiliza un banco de energía como fuente de alimentación, debe asegurarse de que el voltaje de salida del banco de energía esté entre 5 V y 35 V y que la corriente de salida no sea inferior a la corriente de funcionamiento del módulo L298N, que es 2 A. Si la corriente de salida del banco de energía es solo 1A, es posible que el módulo L298N no funcione correctamente o funcione de manera inestable. Por lo tanto, se recomienda utilizar un banco de energía con una corriente de salida de 2 A o superior para alimentar el módulo L298N . Al mismo tiempo, para garantizar la estabilidad del circuito, se recomienda utilizar un banco de energía de calidad confiable.
2. Cuando el voltaje de entrada de energía es de 7 ~ 12 V, no es necesario conectar la posición de 5 V a la fuente de alimentación. Esta posición puede generar 5 V para alimentar el microcontrolador. La GND del L298N está conectada a la GND del microcontrolador. (De lo contrario, no habrá voltaje de referencia y no se podrá realizar el control normal). Como se muestra a continuación.
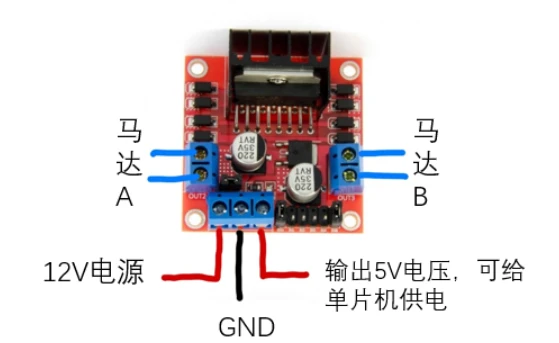
(Se recomienda encarecidamente este método)
3. Cuando el voltaje de entrada es superior a 12v, debe desconectar la tapa del puente junto a la fuente de alimentación. El terminal de 5V debe conectarse a un voltaje de 5v y GND debe conectarse a GND. Como se muestra abajo
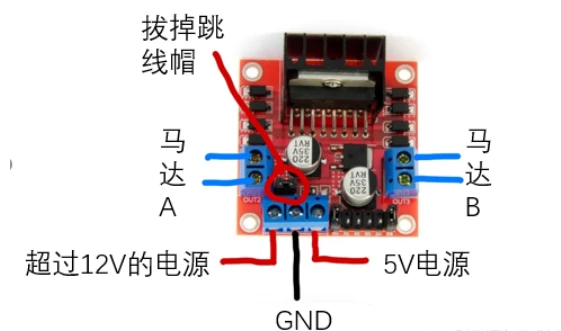
Motivo para desconectar la tapa del puente: utilice una fuente de alimentación de 5 V para alimentar el chip. Si no desconecta la tapa del puente de habilitación integrada, el chip regulador de voltaje 7805 incorporado podría dañarse.
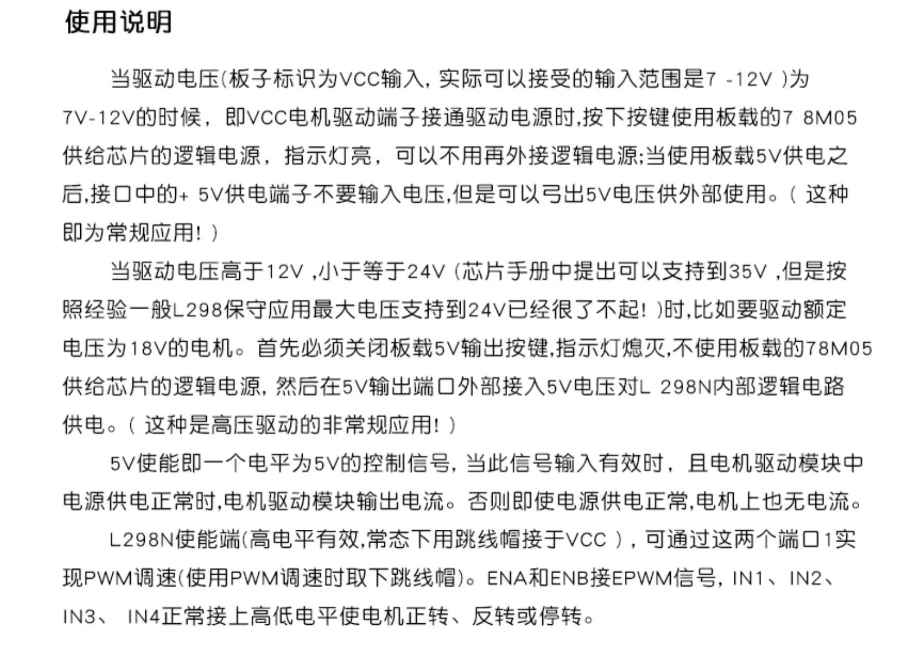
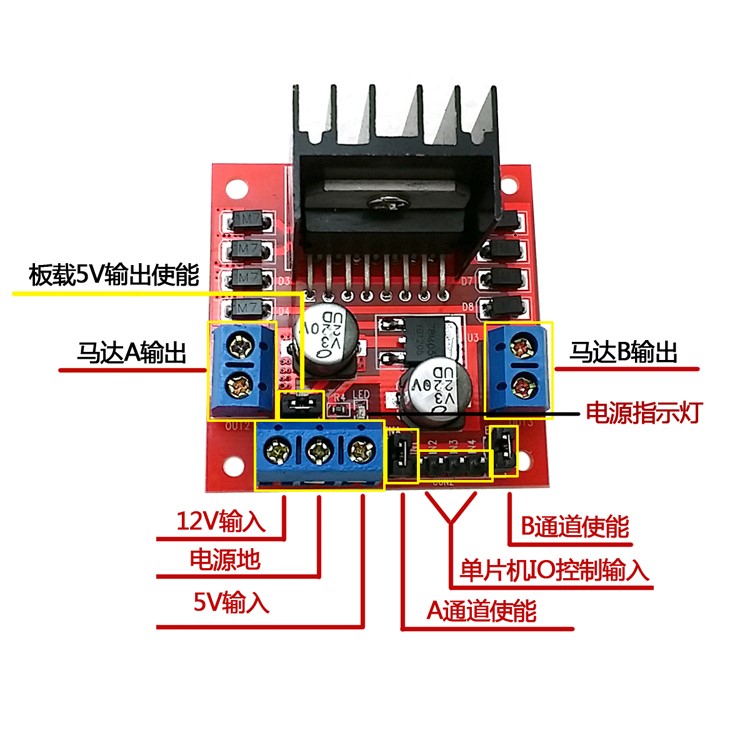
Los dos primeros párrafos aquí son fáciles de entender, especialmente después de conocer los tres métodos de suministro de energía del L298N, pero podemos prestar atención a las luces indicadoras mencionadas en él para verificar si son consistentes.
El último párrafo habla del control de velocidad PWM. Cuando lo compré por primera vez, tanto ENA como ENB estaban enchufados en puentes y conectados a VCC, es decir, bajo este tipo de accionamiento, el motor funciona a máxima velocidad. Cuando queremos ajustar la velocidad del motor, debemos desconectar las tapas de los puentes de ENA y ENB y conectar la señal de salida PWM en el microcontrolador a ENA y ENB. ENA y ENB funcionan de forma independiente y controlan los motores izquierdo y derecho respectivamente. .
Unidad de motor de CC:
esta placa de controlador puede controlar 2 motores de CC. Es eficaz cuando los terminales de habilitación ENA y ENB están en nivel alto. El método de control y la tabla de estado del motor de CC son los siguientes:
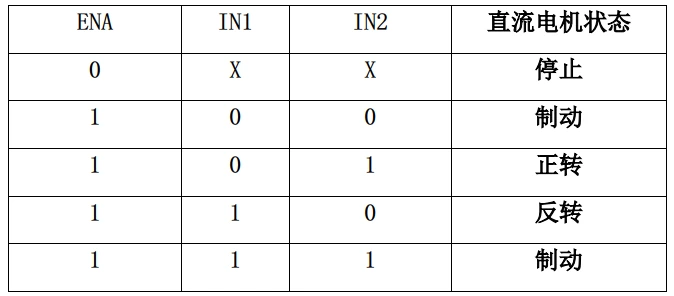
Si desea realizar la regulación de velocidad PWM en un motor de CC, debe configurar IN1 e IN2 para determinar la dirección de rotación del motor y luego enviar pulsos PWM al terminal de habilitación para lograr la regulación de velocidad. Tenga en cuenta que cuando la señal de habilitación es 0, el motor está en un estado de parada libre; cuando la señal de habilitación es 1 y IN1 e IN2 son 00 u 11, el motor está en un estado de frenado, lo que impide que gire.
Hasta ahora, se ha completado el estudio preliminar para obtener información sobre el "módulo controlador de motor con chip L298N".
3) 3 baterías de litio de 12V

Nota: El cable rojo es el polo positivo y el cable negro es el polo negativo.
En este punto se completa el estudio de "3 baterías de litio de 12V".
4) Placa base mínima STM32F103C8T6
Hay muchos materiales de aprendizaje para este componente, que se pueden obtener de
Punctual Atomic: 资料盘 Información de la placa de desarrollo Disco A: https://pan.baidu.com/s/1gCnUaE9sqOMJQbXdq-LByw Código de extracción: izgd
El diagrama esquemático del circuito de STM32F103C8T6 se puede descargar desde "3. Adquisición de datos y aprendizaje de cada componente. Conexión de datos" , y se puede obtener en "Materiales de aprendizaje del proyecto de graduación-Diagrama esquemático del circuito-Stm32f103c8t6 Diagrama esquemático del sistema mínimo original"
Primero, mire un video de introducción física: explicación especial del uso de la placa central STM32F103C8T6 para ayudarlo a jugar fácilmente 32 [Open Future Technology]_bilibili_bilibili
Introducción al conocimiento de principios: [ 1-2] Introducción a STM32_bilibili_bilibili
En cuanto al enlace de información en la introducción de este video, no importa si lo descarga o no, porque el método de desarrollo de STM32 elegido en este video es el desarrollo de biblioteca estándar (pero como principiante, el método de desarrollo más amigable es Desarrollo de la biblioteca HAL), y también utilizamos algunos de los programas que contiene. No, algunos documentos también se pueden descargar de Zhengdian Atom. Pero hay una imagen que siempre uso:
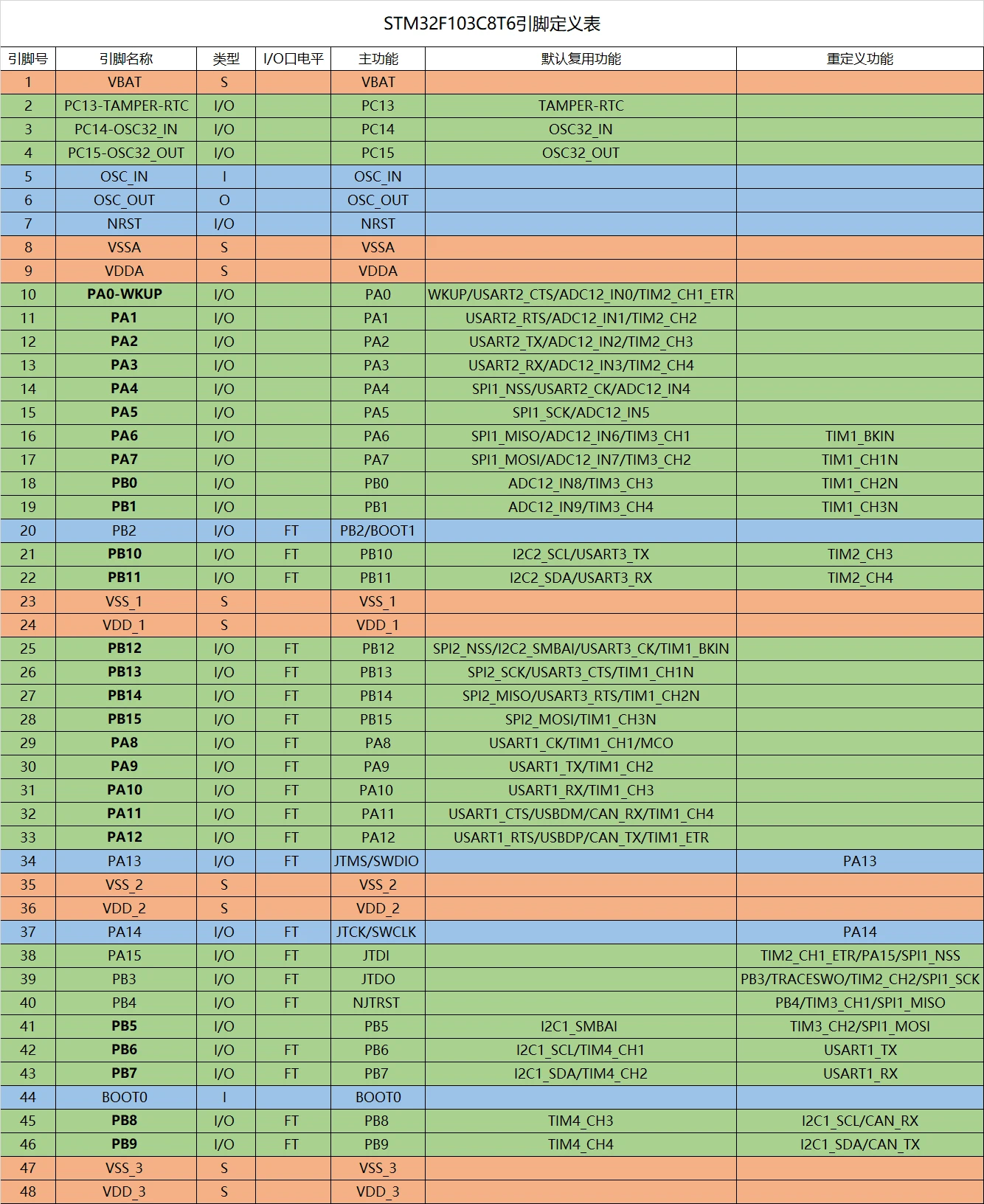
Esta imagen se puede descargar de "STM32F103C8T6 pin definición.xlsx" en "3. Adquisición de datos y aprendizaje de cada componente. Conexión de datos"
¿Cuáles son los métodos de desarrollo para STM32? (114 mensajes) Cuatro métodos de desarrollo del blog-CSDN de STM32_stm32 development_ONE_Day|
¿Cómo colocar las tapas de los puentes de boot0 y boot1? (Te daré la conclusión directamente. Generalmente está relacionada con la forma de grabar el programa)
| método de quema | Operación de boot0 y boot1 | modo de inicio |
|---|---|---|
| usb a ttl | Establezca boot0 en 1 y boot1 en 0 | memoria del sistema |
| enlace j | Establezca boot0 en 0, boot1 es arbitrario | memoria flash principal |
| stlink | Establezca boot0 en 0, boot1 es arbitrario | memoria flash principal |
| enlace dap | Establezca boot0 en 0, boot1 es arbitrario | memoria flash principal |
Lo comprenderá después de leer este artículo: (115 mensajes) Explicación detallada de los tres modos de inicio BOOT de STM32 (el más completo de toda la red)_Blog-CSDN de Junior Guoguo
Este proyecto trata de aprender lo que necesitas usar. Si quieres aprender sistemáticamente, puedes encontrar una serie de cursos en línea y seguirlos en detalle.
En este punto, se completa el estudio de la "Placa del sistema mínima STM32F103C8T6".
5) Placa de desarrollo Maix Dock
Cómo ensamblar la placa de desarrollo Maix Dock después de obtenerla, una comprensión preliminar: Introducción al uso de maix dock - Tecnología - Vea videos genuinos completos de alta definición en línea - Youku (tudou.com)
El vídeo de arriba fue narrado por un niño y es bastante bueno.
El sitio web oficial de aprendizaje de la junta de desarrollo proporciona enseñanza de documentos chinos, que es muy detallada y se puede estudiar:
Introducción a la documentación MaixPy: Introducción a la documentación MaixPy - Sipeed Wiki
En este punto, se completa el estudio de la parte "Placa de desarrollo Maix Dock".
6) Módulo Bluetooth HC-05
¿Dónde puedo obtener la información? Por supuesto, vaya a Taobao. Taobao vende este producto. La introducción del producto generalmente presentará el uso y las precauciones del producto. Si es la primera vez que aprende a través de Taobao, no se preocupe, debido a que no sabe lo suficiente sobre el producto, puede pasar por alto algunas partes de las instrucciones en Taobao, pero a medida que aprenda a comprender el componente lo suficientemente bien, comprenderá mejor el componente. preste más atención. Algunos pequeños detalles, como la fuente de alimentación, porque hacerlo mal significa que puede quemarse. Aquí tomamos el módulo Bluetooth hc-05 como ejemplo para estudiar este componente en detalle.
Primero busque el enlace de compra de Taobao para el módulo Bluetooth: Módulo Bluetooth integrado maestro-esclavo HC-05 con placa base, puerto serie inalámbrico comunicación de transmisión transparente Módulo Bluetooth HC-05 - Taobao (taobao.com)
A veces algunos comerciantes son vagos y no presentan el componente con suficiente detalle o incluso no lo introducen, no te preocupes, si buscamos en otro comerciante, siempre podremos encontrar al responsable. Algunos comparten información en forma de Baidu Netdisk, mientras que otros ponen el contenido directamente en los detalles del bebé. En ambos casos el conocimiento se puede aprender.
Los detalles del bebé en el enlace anterior brindan una introducción detallada a la lógica de nivel, las características del producto, los usos del HC-05, cómo conectar el módulo Bluetooth a la computadora (válido en modo esclavo), etc. Lo copié directamente aquí y tomé notas para ayudar a aprender este componente.
Si desea ingresar al modo AT
Sólo sigue presionando el botón
hasta que se complete la configuración
Puede que al principio no entiendas esta frase, pero primero comprendamos los distintos modos del HC-05:
El módulo Bluetooth HC-05 tiene los siguientes modos:
Modo de comando AT: En este modo, los comandos AT se pueden enviar a través del puerto serie para configurar varios parámetros del módulo, como velocidad de baudios, nombre, código PIN, etc.
Modo de transmisión transparente: en este modo, el módulo envía los datos recibidos por el puerto serie a través de Bluetooth y también emite los datos recibidos por Bluetooth a través del puerto serie.
El modo de transmisión transparente del módulo Bluetooth HC-05 es un modo de comunicación en serie simple que puede transmitir datos en serie de forma inalámbrica al otro extremo a través de Bluetooth para lograr una comunicación en serie inalámbrica. En el modo de transmisión transparente, el módulo Bluetooth HC-05 transmitirá los datos recibidos directamente al extremo opuesto a través de Bluetooth y también emitirá los datos desde el extremo opuesto a través del puerto serie. Este modo es muy adecuado para escenarios de aplicaciones que requieren transmisión inalámbrica de datos, como hogares inteligentes, vehículos inteligentes, etc. Para ingresar al modo de transmisión transparente, debe configurar el modo de trabajo del módulo Bluetooth HC-05 en el modo de transmisión transparente. Para conocer el método de configuración específico, consulte el manual de usuario del módulo Bluetooth HC-05.
Modo maestro-esclavo: En este modo, el módulo puede servir como host para conectarse a otros dispositivos Bluetooth, o como esclavo para conectarse a otros dispositivos Bluetooth.
Modo host: en este modo, el módulo solo puede servir como host para conectarse a otros dispositivos Bluetooth.
Modo esclavo: En este modo, el módulo sólo puede conectarse como esclavo mediante otros dispositivos Bluetooth.
El modo AT aquí puede entenderse como el modo de configuración, que establece principalmente la velocidad en baudios.
La velocidad en baudios se refiere a la cantidad de símbolos transmitidos por segundo en la comunicación digital. Se usa comúnmente en comunicaciones en serie y representa la cantidad de bits transmitidos por segundo. Las velocidades de baudios comunes son 9600, 115200, etc. Una velocidad de transmisión más alta da como resultado una transferencia de datos más rápida, pero también aumenta la probabilidad de errores de transmisión. Al realizar una comunicación en serie, es necesario asegurarse de que la velocidad en baudios de las partes emisora y receptora sea consistente ; de lo contrario, se producirán errores en la transmisión de datos.
intentar
¡Aviso! ! ! ¡No conecte la fuente de alimentación al pin de señal, ya que se quemará directamente!
Los pines de señal son RXD y TXD, que son el pin transmisor del puerto serie y el pin receptor del puerto serie respectivamente. Está marcado en el componente que estos dos pines deben conectarse a una señal de 3,3 V y no se pueden conectar a una fuente de alimentación de 5 V. , así que no los conectes incorrectamente. El rango de voltaje del pin VCC es 3.6V~6V. Si está conectado a 3.3V, no funcionará correctamente. Generalmente está conectado a 5V.
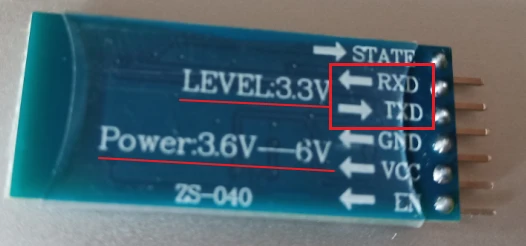
1.1 Poco sentido común (muy importante):
TXD: extremo de envío, generalmente representado como su propio extremo de envío, la comunicación normal debe estar conectada al RXD de otro dispositivo.
RXD: extremo receptor, generalmente representado como su propio extremo receptor, la comunicación normal debe estar conectada al TXD de otro dispositivo.
Durante la comunicación normal, su propio TXD siempre está conectado al RXD del dispositivo.
Autotransmisión: Durante la comunicación normal, RXD está conectado al TXD de otros dispositivos, por lo que si desea recibir los datos enviados por usted mismo, como su nombre lo indica, recibirá los datos enviados por usted mismo, es decir, los suyos propios. TXD está conectado directamente a RXD para probar su propio envío y recepción. Si es normal o no, es el método de prueba más rápido y simple. Cuando ocurra un problema, realice esta prueba primero para determinar si el producto está defectuoso . También se llama prueba de bucle invertido.
Aquí le recordamos que no debe cometer errores al conectar RXD y TXD.
Las ondas enviadas por la comunicación Bluetooth HC-05 son ondas de radio, que son ondas electromagnéticas que pertenecen a la banda de frecuencia ISM de 2,4 GHz. En concreto, utiliza el protocolo Bluetooth y utiliza el método de modulación GFSK. GFSK es un método de modulación por cambio de fase de alta frecuencia que puede lograr una transmisión de datos de alta velocidad y una comunicación confiable en la banda de frecuencia de 2,4 GHz.
1.2 Lógica de nivel:
Nivel TTL: Generalmente la representación de datos usa binario, estipulando que +5V es equivalente al "1" lógico, 0V es equivalente al "0" lógico, llamado sistema de señal TTL, es un nivel RS232 de lógica positiva: usa
-12V a -3V, equivalente al "0 lógico", los niveles lógicos de +3V a +12V, equivalentes al "1 lógico", son de lógica negativa
La lógica de nivel del HC-05 es el nivel TTL.
1.3 Características del producto:
1. El módulo central utiliza el módulo esclavo HC-05. La interfaz de salida incluye VCC, GND, TXD, RXD, pines KEY y pin de estado de conexión Bluetooth (ESTADO). La salida es baja cuando no está conectado. y la salida es alta después de la conexión.
2. El LED indica el estado de la conexión Bluetooth. Parpadeo rápido indica que no hay conexión Bluetooth. Parpadeo lento indica que se ingresa al modo AT. Parpadeo doble indica que Bluetooth está conectado y el puerto está abierto. 3
. La placa base está equipada con un diodo antirretroceso , con un LDO de 3,3 V y un voltaje de entrada de 3,6 ~ 6 V. La corriente es de aproximadamente 30 mA cuando no está emparejado y aproximadamente 10 mA después del emparejamiento. Está prohibido que el voltaje de entrada exceda los 7 V. !
4. El nivel de interfaz es de 3,3 V, que se puede conectar directamente a varios microcontroladores (51, AVR, PIC, ARM, MSP430, etc.) ¡Los microcontroladores de 5 V también se pueden conectar directamente, sin MAX232 y no pueden pasar por MAX232!
5. La distancia efectiva en el área abierta es de 10 metros (el nivel de potencia es CLASE 2). Es posible exceder los 10 metros, pero la calidad de la conexión a esta distancia no está garantizada. 6.
Después del emparejamiento, se puede utilizar como Puerto serie full-duplex. No es necesario comprender ningún protocolo Bluetooth. Admite un formato de comunicación con 8 bits de datos, 1 bit de parada y verificación de paridad configurable . Este también es el formato de comunicación más comúnmente utilizado, y otros formatos no son compatibles. .
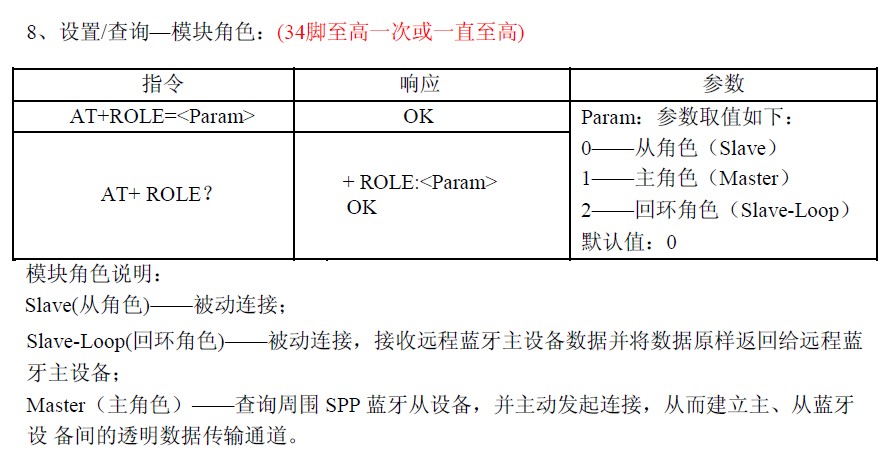
7. Puede ingresar al modo de comando AT tirando hacia arriba del pin 34 para configurar los parámetros y consultar información.
8. Tamaño pequeño** (3,57 cm * 1,52 cm), la producción de parches de fábrica es precisa, lo que garantiza la calidad del parche. También está cubierto con un tubo termorretráctil transparente, que es hermoso y resistente al polvo, y tiene ciertas capacidades antiestáticas.
9. Puede cambiar al modo host o esclavo mediante comandos AT y puede conectarse a dispositivos designados mediante comandos AT.
10. Admite velocidades de baudios estándar de 4800 bps a 1382400 bps
El punto 1 habla de los pines del HC-05, este proyecto solo usa VCC, GND, TXD y RXD, y los otros dos pines no están conectados a nada.
El punto 2 se entenderá al utilizarlo.
Puntos 3 y 4:
Este pasaje significa:
-
La placa base del módulo HC-05 está equipada con un diodo de conexión anti-inversa para evitar que el usuario dañe el módulo debido a la conexión inversa al conectar la fuente de alimentación.
-
También hay un regulador LDO de 3,3 V en la placa inferior, que puede estabilizar el voltaje de entrada a 3,3 V para garantizar el funcionamiento normal del módulo.
-
El rango de voltaje de entrada del módulo HC-05 es de 3,6 V a 6 V. Si el voltaje de entrada excede este rango, el módulo puede dañarse.
-
Cuando el módulo HC-05 no está emparejado, la corriente es de aproximadamente 30 mA y, cuando está emparejado, la corriente es de aproximadamente 10 mA. Esto se debe a que cuando está emparejado, el módulo necesita enviar y recibir datos, mientras que cuando está desemparejado, el módulo solo necesita esperar las solicitudes de conexión.
En resumen, este párrafo recuerda a los usuarios que presten atención al rango de voltaje de entrada cuando utilicen el módulo HC-05, eviten el suministro de energía inversa y presten atención al consumo de corriente del módulo.
Punto 6: El puerto serie full-duplex se refiere a un método de comunicación de puerto serie que puede enviar y recibir datos al mismo tiempo.
Punto 7: El pin 34 es un pin en el módulo HC-05. Cuando este pin se levanta, el módulo HC-05 ingresará al modo de comando AT. En este momento, los comandos AT se pueden enviar a través del puerto serie para configurar los parámetros. y consultar información. .
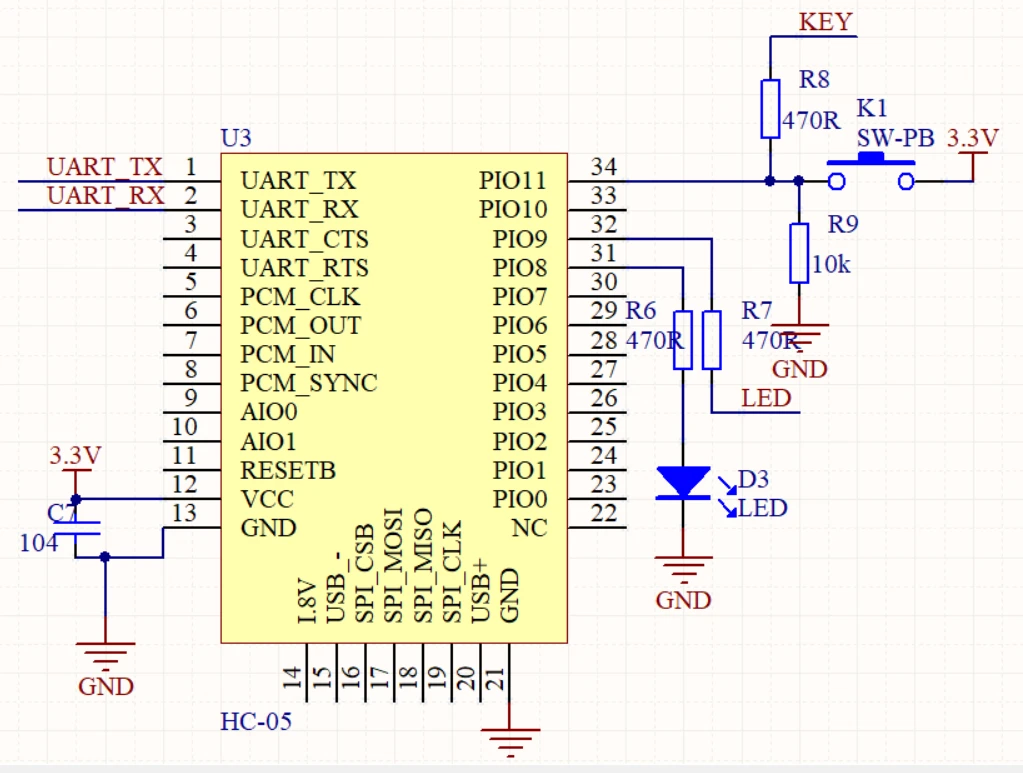
Al observar el diagrama esquemático, aprendimos que tirar del pasador 34 hacia arriba en realidad presiona el botón del componente. Este botón es el pin LLAVE en el primer punto.
1.4 Uso del producto:
Después del emparejamiento, solo necesita usarse como un puerto serie de velocidad de baudios fija. Por lo tanto, siempre que sea un dispositivo de puerto serie con un formato de comunicación de "velocidad de baudios fija, 8 bits de datos, sin verificación de paridad", Puede reemplazar directamente el puerto serie original con cable sin modificar el programa. Como recopilación de datos, automóviles inteligentes, impresoras en serie, control de pantalla de tira de matriz de puntos para exteriores, etc.
**Emparejado con una computadora: ** Adecuado para la comunicación entre la computadora y el dispositivo a través del puerto serie Bluetooth, el método de uso es el mismo que el del puerto serie **
Emparejado con el teléfono móvil: ** Adecuado para la comunicación entre el teléfono móvil teléfono y el dispositivo a través del puerto serie Bluetooth, el método de uso es el mismo que el puerto serie
** Emparejado con un host Bluetooth: **Adecuado para que dos dispositivos se comuniquen directamente a través del puerto serie Bluetooth, como entre un solo chip computadora y una computadora de un solo chip, entre un puerto serie cableado y una computadora de un solo chip, etc. El método de uso es el mismo que el del puerto serie.
Uso alternativo:
conversión de velocidad en baudios, porque el extremo receptor y el extremo transmisor pueden seleccionar sus propias velocidades en baudios y pueden usarse como un dispositivo de conversión de velocidad en baudios cuando la cantidad de datos es pequeña.
Emparejado con la computadora: La computadora se comunica con HC-05 a través del asistente de depuración del puerto serie " XCOM V2.8.exe " (descargar en ** Enlace de información **). El método de uso se presenta a continuación.
Emparejado con un teléfono móvil: el teléfono móvil se comunica con HC-05 a través del asistente de puerto serie " xnj.lazydog.btcontroller.apk " (descargar en ** Enlace de información **). El método de uso se presenta a continuación.
Este elemento no se utiliza cuando se empareja con un host Bluetooth.
Antes de usar HC-05, primero ingresamos al modo de comando AT y realizamos algunas configuraciones. Para conocer el método de configuración, consulte la introducción de Taobao a continuación:
1. Preparación del equipo requerido:
①Un módulo Bluetooth HC05
②Un módulo USB a TTL
③4 cables DuPont
2. Cableado
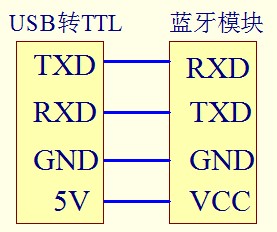
Nota: ¡El VCC del módulo Bluetooth solo se puede conectar a 5V, no a 3,3V!
3. Prueba
Primero presione y mantenga presionado el botón en el módulo Bluetooth HC05 y luego encienda el módulo Bluetooth. El LED del módulo Bluetooth entra en modo de parpadeo lento (parpadea una vez cada 1 segundo aproximadamente) y se puede realizar la prueba del comando AT.
El formato del comando AT es: velocidad en baudios 38400, 8 bits de datos, 1 bit de parada, sin paridad. Después de ingresar cada comando, debe presionar la tecla Enter antes de enviar.
Por ejemplo: ingrese AT, presione la tecla Enter para enviar, el módulo Bluetooth devolverá OK
①Cómo modificar el módulo Bluetooth al modo host:
Ingrese AT+ROLE=1 y luego presione la tecla Enter para enviar. Bluetooth devuelve OK, lo que indica que la modificación se realizó correctamente. Después de apagarlo y volver a encenderlo, el módulo Bluetooth estará en modo maestro y buscará automáticamente los dispositivos esclavos circundantes.
Ingrese AT+ROLE=0 para cambiar al modo esclavo. (Nota: el valor predeterminado es el modo esclavo, no se requiere modificación)
②Cómo modificar el nombre del módulo Bluetooth:
Ingrese AT+NAME=Beijin y presione la tecla Enter para enviar. Bluetooth devuelve OK, lo que indica que el nombre de Bluetooth se cambia a Beijing.
③Cómo modificar la contraseña de emparejamiento del módulo Bluetooth:
Ingrese AT+PSWD=2222 y presione la tecla Enter para enviar. Bluetooth devuelve OK, lo que indica que la contraseña de emparejamiento de Bluetooth se ha cambiado a 2222.
④Cómo modificar la velocidad en baudios de comunicación (Nota: la velocidad en baudios en modo AT es 38400 y la velocidad en baudios en comunicación normal es 9600):
Ingrese AT+UART=115200,1,2 y luego presione la tecla Enter para enviar. Bluetooth devuelve OK, lo que indica que la velocidad en baudios de la comunicación Bluetooth se modifica a 115200, 2 bits de parada, verificación uniforme (Nota: el parámetro de comunicación predeterminado es 9600 ,0 ,0)
Consejos amables:
1. El voltaje de la fuente de alimentación debe ser de 5 V, no de 3,3 V.
2. No conecte las clavijas del cable de alimentación a las líneas de datos. Confirme cuidadosamente antes de realizar el cableado.
3. El LED debe entrar en modo de parpadeo lento antes de poder realizar la prueba del comando AT.
4. Después de ingresar cada comando AT, debe presionar la tecla Enter antes de enviarlo.
5. Si no se puede devolver OK, intercambie RXD y TXD.
6. No arranque el tubo termorretráctil ni lo suelde usted mismo; de lo contrario, se considerará que renuncia a la garantía y a los servicios de devolución y cambio.
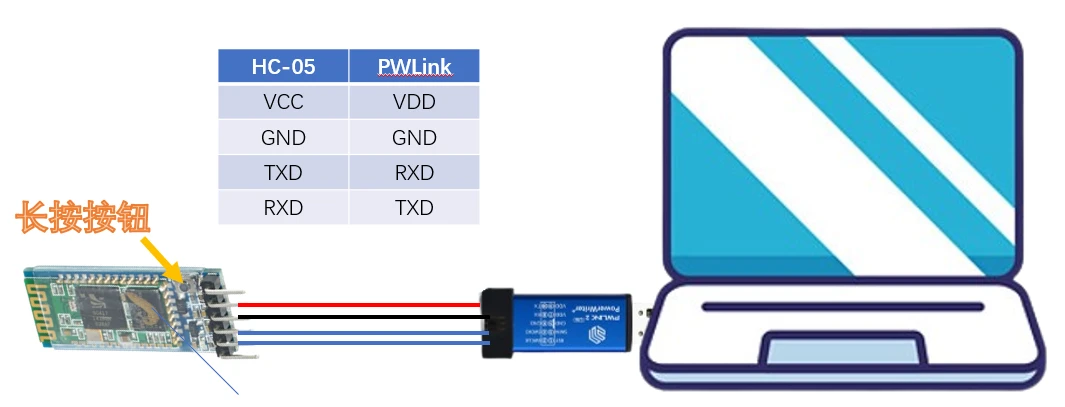
Usamos PWlink para el módulo USB a TTL.
PWLink es un convertidor de puerto serie USB a TTL que puede convertir la interfaz USB en señales de puerto serie TTL y se utiliza para conectar y controlar varios dispositivos de puerto serie.
Al realizar el cableado, el VCC del HC-05 solo se puede conectar a 5 V, pero los dos VDD de PWlink emiten 3,3 V de forma predeterminada. También debe configurarlo en el software. Para métodos de operación específicos, consulte: (106 mensajes) pwlink se utiliza para convertir USB a TTL . Al ingresar al modo AT de HC-05_hc05, no se puede ingresar al blog-CSDN del blog AT mode_quxuexi
(1) Ingrese al modo AT para configurar la velocidad en baudios
Primero presione y mantenga presionado el botón en el módulo Bluetooth HC05 y luego encienda el módulo Bluetooth. El LED del módulo Bluetooth ingresa al modo de parpadeo lento (parpadea una vez cada 1 segundo aproximadamente) para ingresar al modo de comando AT.
El diagrama de conexión física es el siguiente:
Abra el asistente de depuración del puerto serie "XCOM V2.8.exe" (descárguelo en ** Enlace de información **), seleccione el puerto serie y seleccione el número de puerto serie correspondiente para ver el método
verificar:
Ingresamos "AT" en el cuadro de entrada a continuación, presionamos Enter nuevamente y luego hacemos clic en "Enviar" a la derecha. En este momento, puede ver el "OK" enviado por HC-05, como se muestra a continuación:

Establecer velocidad en baudios:
Ingrese "AT+UART=115200, 0, 0" (bit de parada 0 o 1, bit de verificación 0, 1, 2) y luego presione la tecla Enter y haga clic en Enviar. Bluetooth devuelve OK, lo que indica que la velocidad en baudios de la comunicación Bluetooth ha ha sido modificado Es 115200, 1 bit de parada, sin paridad. El motivo de esta configuración es que la configuración predeterminada al configurar el puerto serie en STM32CubeMx es así: después de configurarla aquí, puede mantener la configuración predeterminada al configurar el puerto serie en STM32CubeMx. La siguiente figura muestra la configuración predeterminada del puerto serie que envía y recibe datos en STM32CubeMx:

(Nota: [AT+UART= < param1 >, < param2 >, < param3 > param1: velocidad en baudios param2: bit de parada, 0=1 bit, 1=2 bits param3: bit de verificación, 0=sin verificación (Ninguno), 1=paridad impar (Impar), 2=paridad par (Par), la configuración predeterminada es 9600,0,0】)
Más referencia de configuración: (127 mensajes) Cómo ingresar al modo AT del módulo Bluetooth_la luz roja zs040 parpadea lentamente_blog de john_crash-blog de CSDN
[La transferencia de la imagen del enlace externo falló. El sitio de origen puede tener un mecanismo anti-leeching. Se recomienda guardar la imagen y cargarla directamente (img-OaNT5IXV-1688999686651)(https://article.biliimg.com/bfs/ artículo/5786f71f62463f15ffe031f22896606207016d22.png)]
En este punto, se completa el estudio del "módulo Bluetooth HC-05".
7) Módulo infrarrojo para evitar obstáculos.
La parte de aprendizaje del "Módulo para evitar obstáculos por infrarrojos" se explica en la "Décima etapa: Aprendizaje y uso del módulo para evitar obstáculos por infrarrojos". Nunca es demasiado tarde para aprender cuándo usarlo.
8) Descargador de depuración PWLINK2 Lite
(1) ¿Por qué comprar el descargador de depuración PWLINK2 Lite?
Primero, comprendamos cuáles son los descargadores comunes para los microcontroladores stm32.
Lo que aprendí incluye stlink, daplink, jlink, usb a ttl.
- ST-Link es un emulador lanzado por ST Company para depurar y programar microcontroladores de la serie STM32.
- DAPLink es un emulador lanzado por ARM que admite una variedad de plataformas MCU, incluida la serie ARM Cortex-M, Nordic nRF51/nRF52, NXP LPC, etc.
- J-Link es un emulador lanzado por SEGGER que admite una variedad de plataformas MCU, incluidas la serie ARM Cortex-M, la serie Renesas RX, NXP LPC, etc.
- USB a TTL es un puerto serie para un dispositivo USB, que a menudo se utiliza para comunicarse con microcontroladores, como durante la depuración y la programación.
Mire una introducción en video: ¿Es esta la herramienta de grabación esencial para STM32? Comparación de tres herramientas de programación básicas para principiantes, ¡con tutoriales de uso! _bilibili_bilibili
Este video presenta y compara tres herramientas de grabación: stlink, jlink y usb a ttl:
| [La transferencia de la imagen del enlace externo falló. El sitio de origen puede tener un mecanismo anti-leeching. Se recomienda guardar la imagen y cargarla directamente (img-iYno6rab-1688999688885)(https://article.biliimg.com/bfs/ artículo/88ab6d70e1c3a660b9e72b95be015a68aadf3126.png)] | [La transferencia de la imagen del enlace externo falló. El sitio de origen puede tener un mecanismo anti-leeching. Se recomienda guardar la imagen y cargarla directamente (img-aoV3Mtbp-1688999688886)(https://article.biliimg.com/bfs/ artículo/dd48fe939bf9190587945799d9ad6b8eafb825f3.png)] | [La transferencia de la imagen del enlace externo falló. El sitio de origen puede tener un mecanismo anti-leeching. Se recomienda guardar la imagen y cargarla directamente (img-AVICGKmN-1688999688887)(https://article.biliimg.com/bfs/ artículo/5630e5bd6d4bc9e84970e79d3291a410c7ebbd22.png)] |
|---|
DAPLink es una interfaz de programación y depuración de código abierto que se puede utilizar para depurar y programar microcontroladores ARM Cortex-M. Estas son algunas de las características de DAPLink:
- Código abierto: DAPLink es un proyecto de código abierto y cualquiera puede ver y modificar su código.
- Soporte multiplataforma: DAPLink admite múltiples sistemas operativos como Windows, Linux y MacOS.
- Compatibilidad con múltiples dispositivos: DAPLink admite una variedad de microcontroladores ARM Cortex-M, incluidos STMicroelectronics, NXP, Cypress, Silicon Labs, etc.
- Descarga rápida: DAPLink puede descargar programas rápidamente al microcontrolador a través de la interfaz USB.
- Función de depuración: DAPLink admite la depuración en línea y puede realizar depuración en un solo paso, depuración de puntos de interrupción y otras operaciones a través del depurador y el IDE.
- Fácil de usar: DAPLink es muy sencillo de usar, simplemente conéctelo a su computadora y microcontrolador para comenzar a depurar y programar.
Lee los comentarios:
¿Lento? La descarga total del firmware es de solo unos pocos kb, por muy lenta que sea, sin mencionar que stlink no es nada lento.
——Aún no has utilizado la serie stm32f4. Cuando entres en contacto con los programas del sistema en tiempo real, sabrás lo popular que es j-link.
——Parece que nunca he usado la descarga de stlink para proyectos grandes, lo cual es realmente terrible.
Los principiantes generalmente necesitan grabar una pequeña cantidad de programas y pueden usar cualquiera.
Esto, esto, esto, ¿PWLINK no lo tiene, CHlink tampoco lo tiene?
——Ambos son esencialmente DAP.
Sí, el descargador de depuración PWLINK2 Lite que compré pertenece al DAPLink presentado anteriormente. Con respecto al uso del descargador de depuración PWLINK2 Lite , aprenda cómo usarlo en el capítulo "3. Comenzando desde cero y primeros pasos".
Leyendo un cuento por aburrimiento: "Experimente la narración de un profesional": descargador depurador de descarga STM32 CMSIS-DAP, DAPLink, descarga de USB a puerto serie - Zhihu (zhihu.com)
En general estoy de acuerdo con lo que se dice. El PWlink que compré también utiliza el método DAPLink para grabar.
(2) Suplemento: Acerca de la grabación del puerto serie
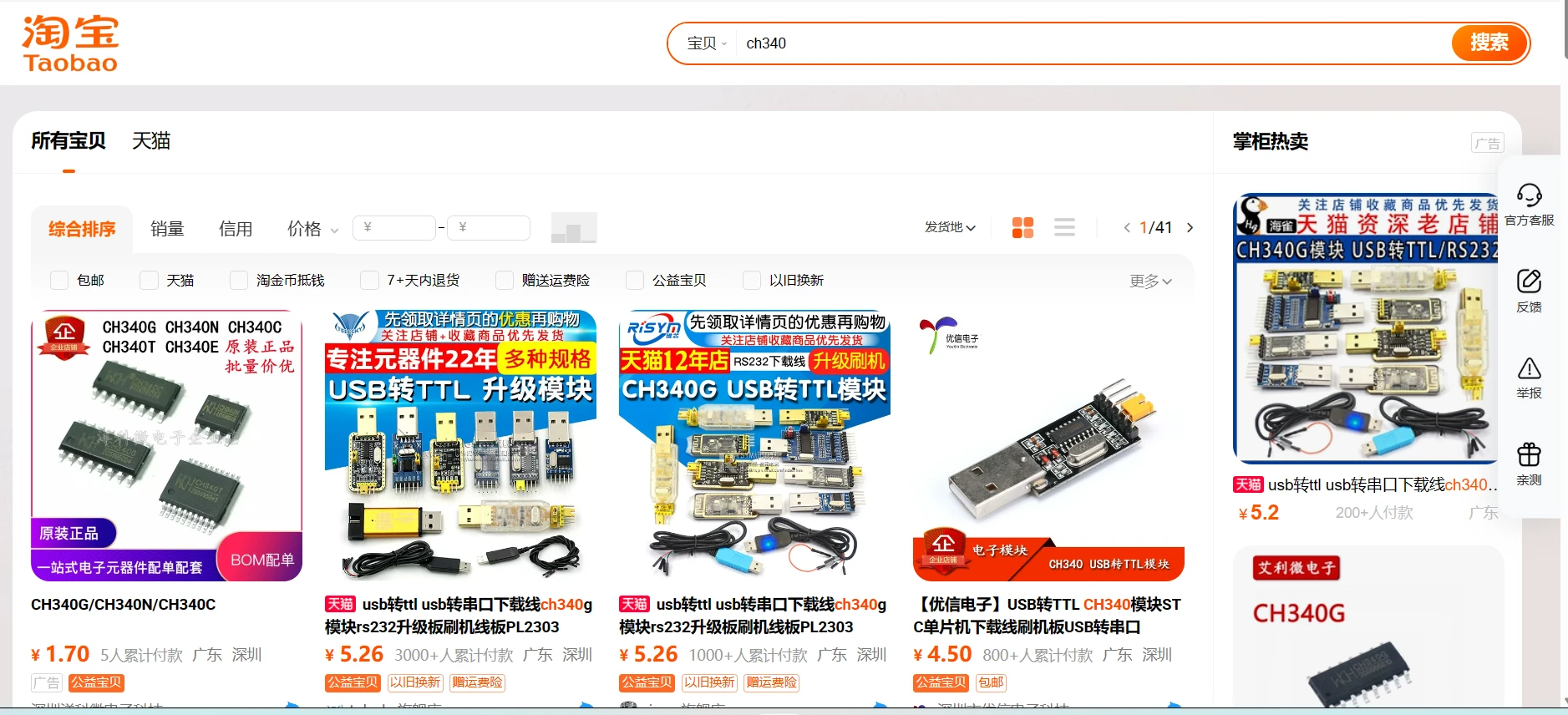
El programa de grabación de puerto serie requiere la instalación del controlador CH340 y la compra de una herramienta de conversión de USB a TTL (alrededor de 5 yuanes), que cuesta menos que un emulador. Al grabar, debe conectar la herramienta USB a TTL al microcontrolador.
Vídeo instructivo:
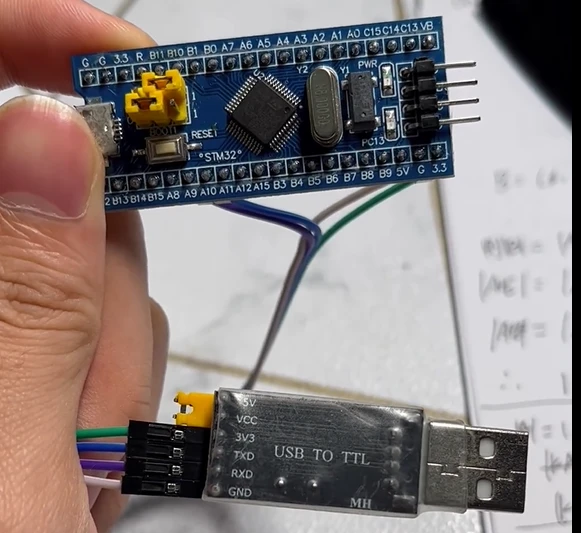
Cómo programar stm32 a través del puerto serie_bilibili_bilibili (USB a TTL y STM32F103C8T6 solo conectan dos cables (TXD, RXD), VCC y GND no están conectados, y el cable de datos USB a Micro (que es el cable de datos para cargar el teléfono móvil) Alimentación STM32F103C8T6)
Documentos didácticos: (113 mensajes) Introducción a los tres métodos de grabación de chip STM32, puerto serie, utilidad STM32 ST-LINK y STM32CubeProgrammer_stm32 programa burn_Blog que recuperó diez años de sueños-blog CSDN (solo consulte "1.2 STM32 Serial Port Burning" " Método " puede ser usado)
El método de conexión USB a TTL con STM32F103C8T6 se muestra en la siguiente tabla:
| USB a TTL | STM32F103C8T6 |
|---|---|
| 3V3 | 3V3 |
| Tierra | Tierra |
| TXD | PA10 |
| RXD | PA9 |
| Establezca BOOT1 en 0 y BOOT0 en 1 |
Imagen real de la grabación del puerto serie:
Busque en Taobao "CH340" para ver la herramienta de conversión de USB a TTL:
El uso del descargador de depuración PWLINK2 Lite para grabar código pertenece al segundo método: descarga basada en el emulador. En este proyecto, necesita comprar un emulador, porque no solo se necesita el programa de grabación, sino también el emulador para la depuración al probar el módulo Bluetooth.
¿Está bien no comprarlo? ¿Qué pasa con los demás?
Poder. También puede comprar STLINK, pero este documento solo presenta el método de grabación DAPlink. El método de grabación STLINK es muy común y hay mucha información. Los lectores pueden consultar la información en línea para aprender a usarlo.
En este punto, se completa la parte de aprendizaje de "PWLINK2 Lite Debug Downloader".
9) Placa de pruebas MB-102
El uso de la placa de pruebas es muy simple y se explica todo en una imagen: [Error en la transferencia de la imagen del enlace externo. El sitio de origen puede tener un mecanismo anti-leeching. Se recomienda guardar la imagen y cargarla directamente (img- VWnn9Hpc-1688999686653) (https://article.biliimg.com/bfs/article/9caf6fdf5d23abc387fd9ec7f5bf3426f5b0cf73.png)]
如果非要觉得有必要再看一个教学视频的话,给出一个:你不一定知道的面包板使用方法_哔哩哔哩_bilibili
至此”MB-102面包板“部分的学习搞定。
10). 发光二极管(5mm,50只)
注意,长的那根是正极,短的那根是负极。可以用3.3v给小灯供电,千万不能用5v直接给小灯供电。
二、软件安装与学习
1. Keil uvision5软件安装及开发环境配置
我的Keil uvision5是在大三上学的一门课《MCS-51单片机》时安装的,当时只安装了51单片机相关的芯片环境,没安装MDK-ARM系列的。
keil C51的介绍:(114条消息) Keil(C51)介绍、下载、安装与注册_keil c51_strongerHuang的博客-CSDN博客
keil MDK的介绍:(114条消息) Keil uVision5 MDK(ARM)软件的介绍、下载、安装与注册_keil uvision5官网_Bornpride的博客-CSDN博客
现在想用keil编写STM32的程序,就需要安装MDK-ARM模块。我安装时参考的:[2-1] 软件安装_哔哩哔哩_bilibili
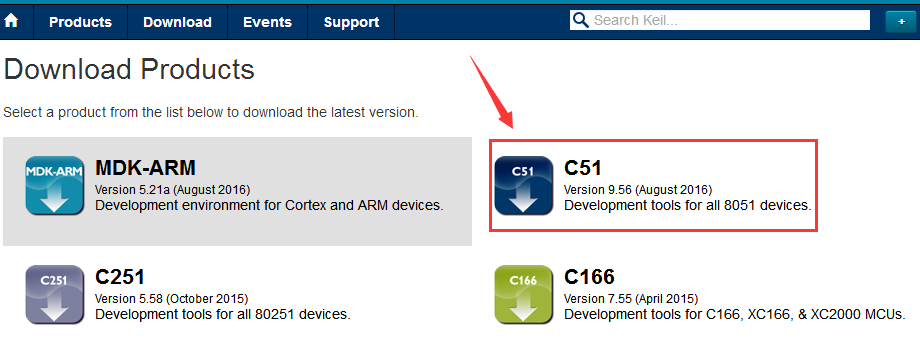
如果你啥也没有,之前也没有安装过Keil uvision5,可以参考这个视频去安装:2023年最新keil5 安装 升级 C51 V9.61 51单片机 最新更新 保姆级安装教程_哔哩哔哩_bilibili。视频里涉及的安装包可以下载**《3. 各元件的资料获取与学习.资料连接》**里的”Keil C51V961_MDK538a软件安装“。
如果你不知道自己的Keil uvision5上有没有安装MDK-ARM,可以查看一下。
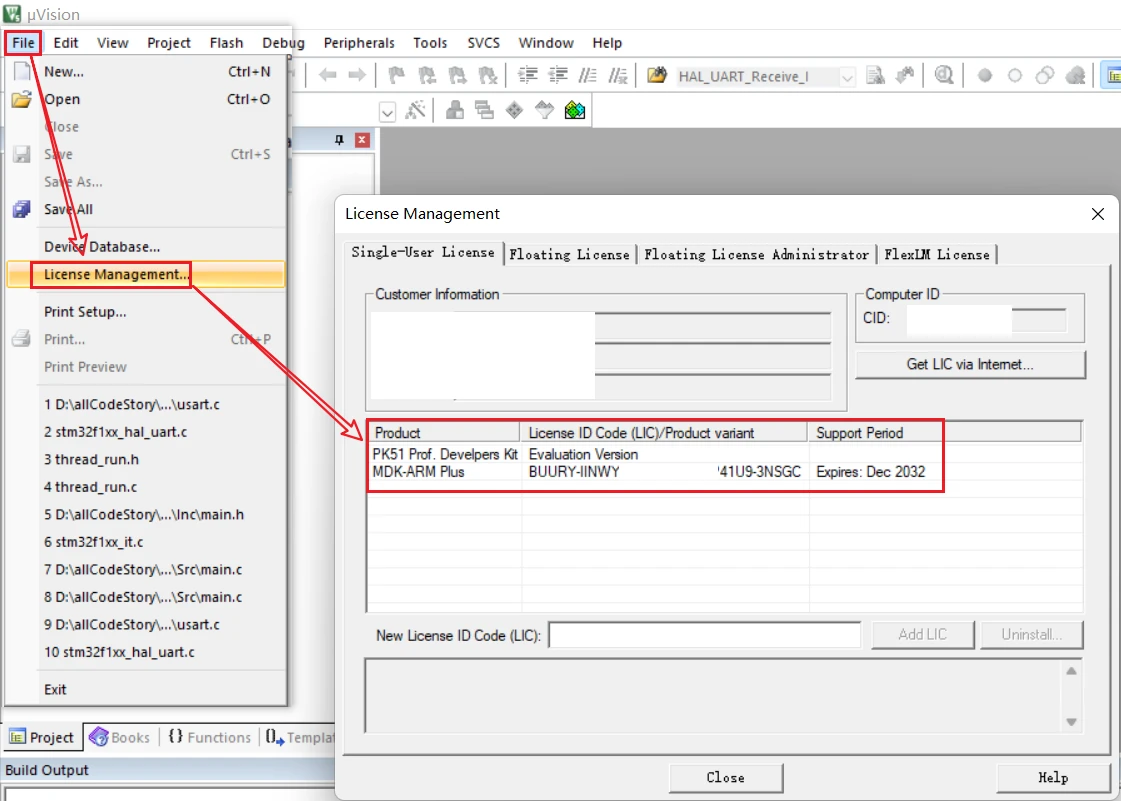
keil uvision5查看是否安装keil MDK(用于编写stm32的开发板)?
答:按照下图查看,如果许可证里有MDK-ARM的,就算安装了。
2. Keil uvision5软件使用
keil官方的一些使用手册文档:ARM Product Manuals (keil.com)
在上面的链接里,可以了解到软件的图形用户界面如何使用,各个按钮的功能,例如如何debug,如何软件仿真,如何编译程序,烧录程序。官方的说明文档系统全面,但可能对于一些问题说明地不够细致,可以再去百度或csdn上搜搜问题,搭配着学习。
如工程配置页面的说明:(113条消息) Keil-5_使用手册_keil5使用手册_零号0的博客-CSDN博客
keil编写代码时的uint8_t / uint16_t / uint32_t /uint64_t 这些数据类型是什么?
(118条消息) uint8_t / uint16_t / uint32_t /uint64_t 这些数据类型是什么?_一剃解千愁的博客-CSDN博客
keil中如何Debug调试
视频教程:(时间:2:57~5:17)STM32必备烧录工具居然是它?三款新手入门烧录工具对比,附使用教程!_哔哩哔哩_bilibili
3. STM32CubeMX软件安装及固件库下载
STM32CubeMX软件安装及固件库下载可以参考正点原子的“STM32F103 MINI开发指南V1.3.pdf”这个文件,在第十章
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-hDbysPcq-1688999686656)(https://article.biliimg.com/bfs/article/f5d6f4dd72df02cd84d5e564e2c5db42aa6f12c8.png)]
下面的内容是参考的网上的资料,结合自己的实践经验做出的总结。网上的资料好多也是参考的正点原子的,所以根据自己的喜好选择跟着那个教学资料进行安装。
别着急,在安装之前,我们先简单了解一下,STM32CubeMX这个软件的安装路径我们可以修改,一般修改为D盘,使用软件进行不同单片机型号的开发,我们需要针对性地安装不同固件库,固件库系统默认安装路径是:“C:\Users\‘用户名’\STM32Cube\Repository”,如果我们不修改,随着使用次数越来越多,固件包下载地越来越多,可能很占用c盘空间,所以还是改一下固件库的安装路径吧。
参考下面这个安装教程进行安装,在下载固件库之前一定要将固件库的保存目录做一下修改,修改为D盘你知道的一个全英文路径(空格啥的也别带),最好是STM32CubeMax安装路径,我的在“D:\ProgramFiles\STM32CUBEMAX\Repository”。下图为固件库路径下的固件库。

修改固件库路径的教程:(114条消息) stm32cubeIDE与stm32cubeMX库文件安装路径自定义设置_cubemx库地址_s2018307的博客-CSDN博客 (这个文章咱看一下,有个印象,在下面这个软件安装教程里,记得在下载固件库之前更改软件默认的固件库路径就行)
STM32CubeMax下载安装教程:(114条消息) (实测可用)STM32 CubeMx安装教程_stm32cubemx_智能小屋ZYXC的博客-CSDN博客
如果不确定自己的电脑有没有装过java环境,可以看看这篇文章里的如何检查是否安装了java环境(即JRE):JAVA环境_如何检查是否安装了java环境(即JRE) (cha138.com)
上面的安装教程里在“3、安装STM32 HAL库”部分只讲解了在线安装的方法,如果在线安装失败可以试试离线安装,离线安装可参考:(114条消息) STM32CubeMX——固件库下载以及安装_stm32固件库下载及安装_꧁花念ᝰ的博客-CSDN博客
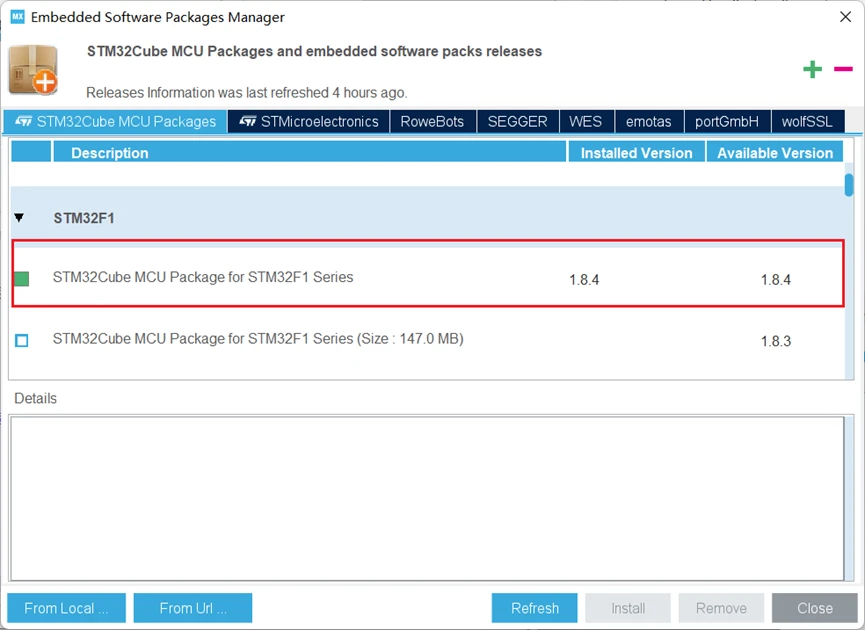
我采取的是上面这个链接介绍的离线安装的方式,首先将固件库的路径改为D盘全英文,去官网下载STM32CubeF1的固件库(如果官网不好下,也可以在**《3. 各元件的资料获取与学习.资料连接》**里下载“STM32Cube_FW_F1_V1.8.4.zip”),我将下载好的固件库解压后放在“D:\ProgramFiles\STM32CUBEMAX\Repository”,然后在软件里操作从本地导入固件库。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-wwgfDt8Q-1688999686657)(https://article.biliimg.com/bfs/article/05172b0f9cf31767bda890a278471c05a767cb76.png)]
上图为解压的固件库文件夹放在设置的固件库的目录,然后进入STM32CubeMax,点击“Help”,再选择“Manage embedded software packages”,点击”Refresh“。
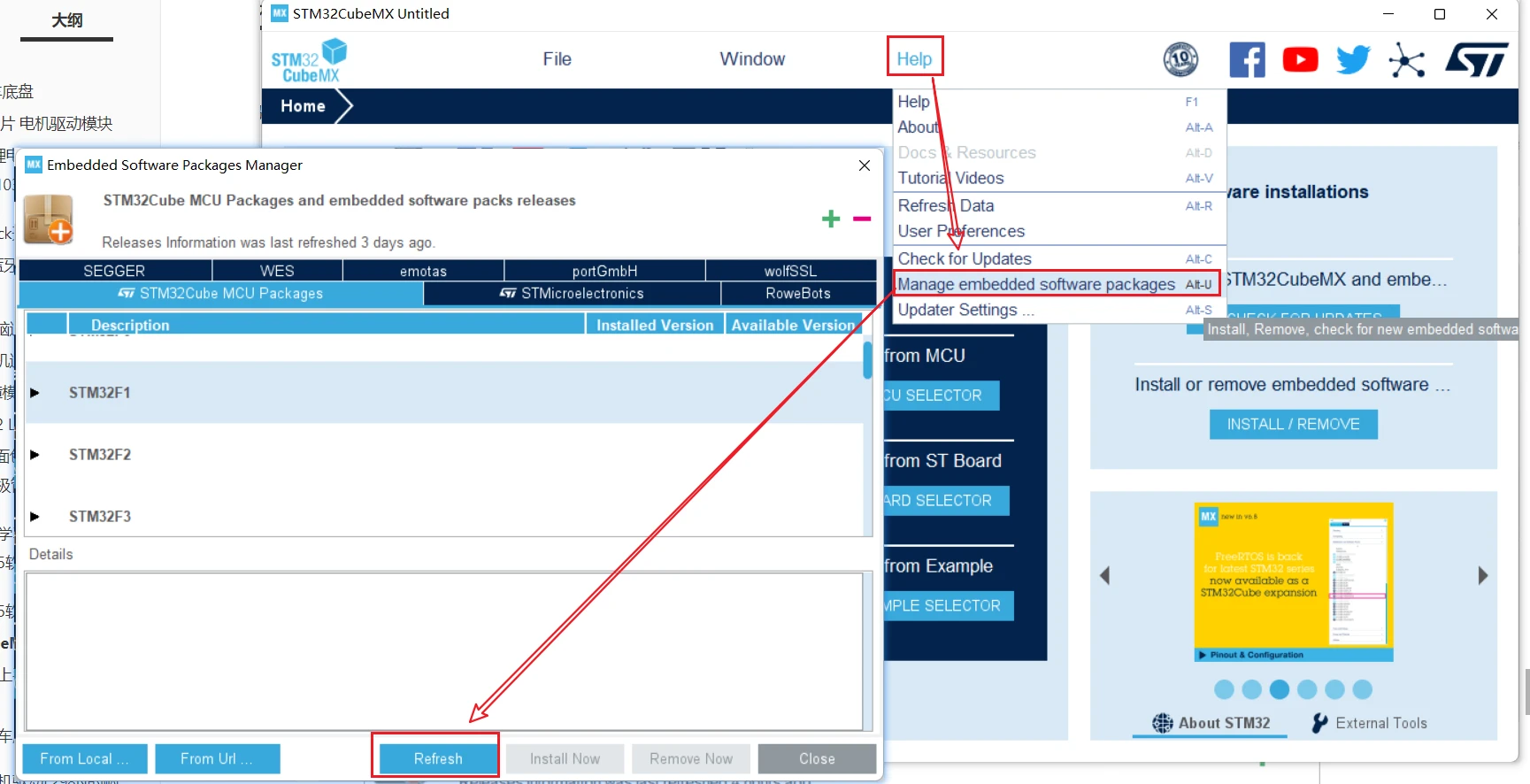
点击refresh,就会识别我们放在固件库目录下的固件包,
4. STM32CubeMX软件使用
学习正点原子资料的“STM32F103 MINI开发指南V1.3.pdf”这个文件的第十章内容。
三、从零开始,上手操作
前言
学习资料哪里找?
第一:关于硬件的资料去淘宝找。一般商品介绍会给一些资料,如果给的网盘形式,但网盘链接是图片无法复制,就去联系客服要,不用管是不是买他家的商品。
第二:去b站。b站上大都是视频介绍,对于小白最友好。但不要过分依赖视频,跟着视频做是傻瓜式操作,对于刚起步的新手很有帮助,但也要去了解为什么要这样操作,以便出现问题自己也能找到解决的办法。
第三:去SCDN、博客园、百度等网站。这些网站搜索的内容很多也很杂,学习时做好甄别,取其精华,去其糟粕。
第四:去官网。像keil软件使用,Maix Dock使用等,官网的资料最全,也最权威,网上讲解的那些好多的源头不都是来自官网。
查看官网说明:µVision User’s Guide (arm.com)
第一阶段:小车底座的购买和搭建
这一阶段主要讲小车底座的购买和搭建。
先在淘宝上买个小车底座,顺便再把杜邦线也买了,因为在小车组装过程中需要对tt直流电机进行焊接连线,这个铜线基于可以使用杜邦线。用于焊接电机的铜线两端,一段是铜丝,就是用于焊接在电机上,另一端是杜邦线的公头或者铜丝,这一段主要用于连接L298N电机驱动。
按照一.2.1).双层小车底盘的讲解购买小车底座;按照一.2.10).公对公、母对母、公对母杜邦线,长20cm各一排的讲解购买杜邦线;按照一.3.1).双层小车底盘的讲解焊接并搭建小车底座;
至此第一阶段的内容告一段落,准备下一阶段的学习。
第二阶段:电机驱动L298N的购买与学习使用
上一阶段讲了小车底座的购买和搭建,这一阶段主要讲电机驱动L298N的购买与学习使用。
按照一.2.2).L298N芯片 电机驱动模块的讲解购买电机驱动,为节约成本,买一个驱动就够了(原因在一.2.1).双层小车底盘部分讲了)。在等快递的时候,我们学习一些关于这款电机驱动的知识。
用一个电机驱动四个电机的方法参考这个视频(不看也行):简易版智能小车《蓝牙版》,Arduino UNO + L298N电机驱动板 + 直流电机x4_哔哩哔哩_bilibili
从这个视频主要学到的就是电机的接线方法,包括将线焊接在电机上,将线连接在电机驱动上。
再看个L298N的介绍视频:简易版智能小车《蓝牙版》,Arduino UNO + L298N电机驱动板 + 直流电机x4_哔哩哔哩_bilibili
这个视频很好地讲解了L298N如何使用,最后还讲了PWM调速的原理
看完介绍视频后再回顾学习一.3.2).L298N芯片 电机驱动模块,了解那里讲的供电方式和PWM相关知识。
电机驱动使用注意事项
-
L298N供电的5V如果是用另外电源供电的话,(即不是和单片机的电源共用,如使用锂电池给L298N供电),那么需要将单片机的GND和L298N模块上的GND连接在起,只有这样单片机上过来的逻辑信号才有个参考0点。板载5V稳压芯片的输入引脚和电机供电驱动接线端子导通的。
-
l298n的板载5V稳压芯片的输入引脚和电机供电驱动接线端子导通的。这句话是什么意思?5V稳压芯片的输入引脚和电机驱动接线端子分别在l298N的哪个位置?
这句话的意思是,L298N电机驱动模块上的5V稳压芯片的输入引脚和电机供电驱动接线端子是连通的。也就是说,当5V稳压芯片输入电压时,电机供电驱动接线端子也会有电压输出。L298N电机驱动模块上的5V稳压芯片的输入引脚是VCC,一般位于模块的左上角。电机供电驱动接线端子则是OUT1、OUT2、OUT3和OUT4,分别对应4个电机驱动通道,一般位于模块的右侧。
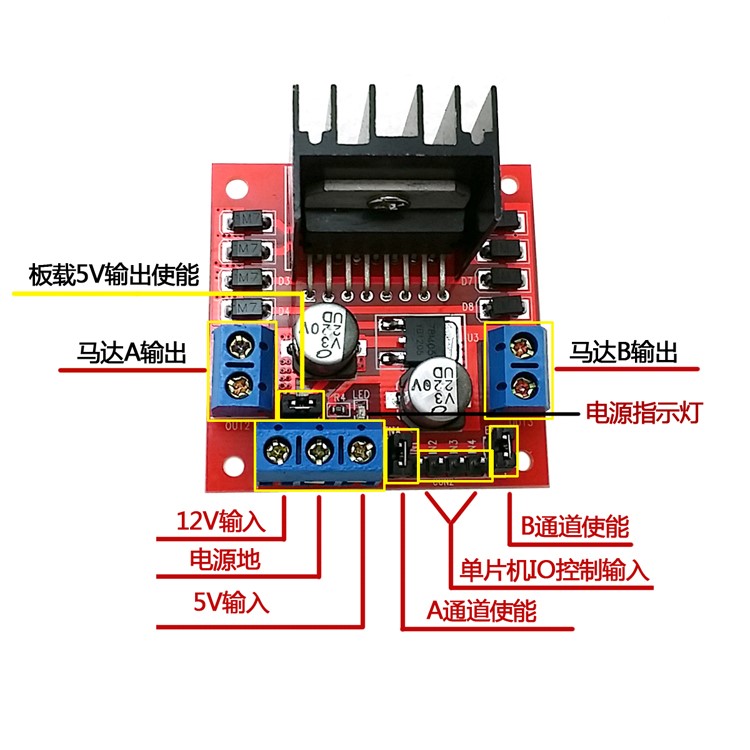
- L298N上有三个跳线帽,分别为板核5V输出使能、A通道使能、B通道使能。板核5V输出使能是否应该拔掉应该看我们怎么给L298N供电,只有当供电电压高于12V时,板核5V输出使能跳线帽才拔掉。A通道使能和B通道使能的跳线帽都是使用到PWM调速时才拔掉,然后接单片机的PWM输出信号。
开始动手了
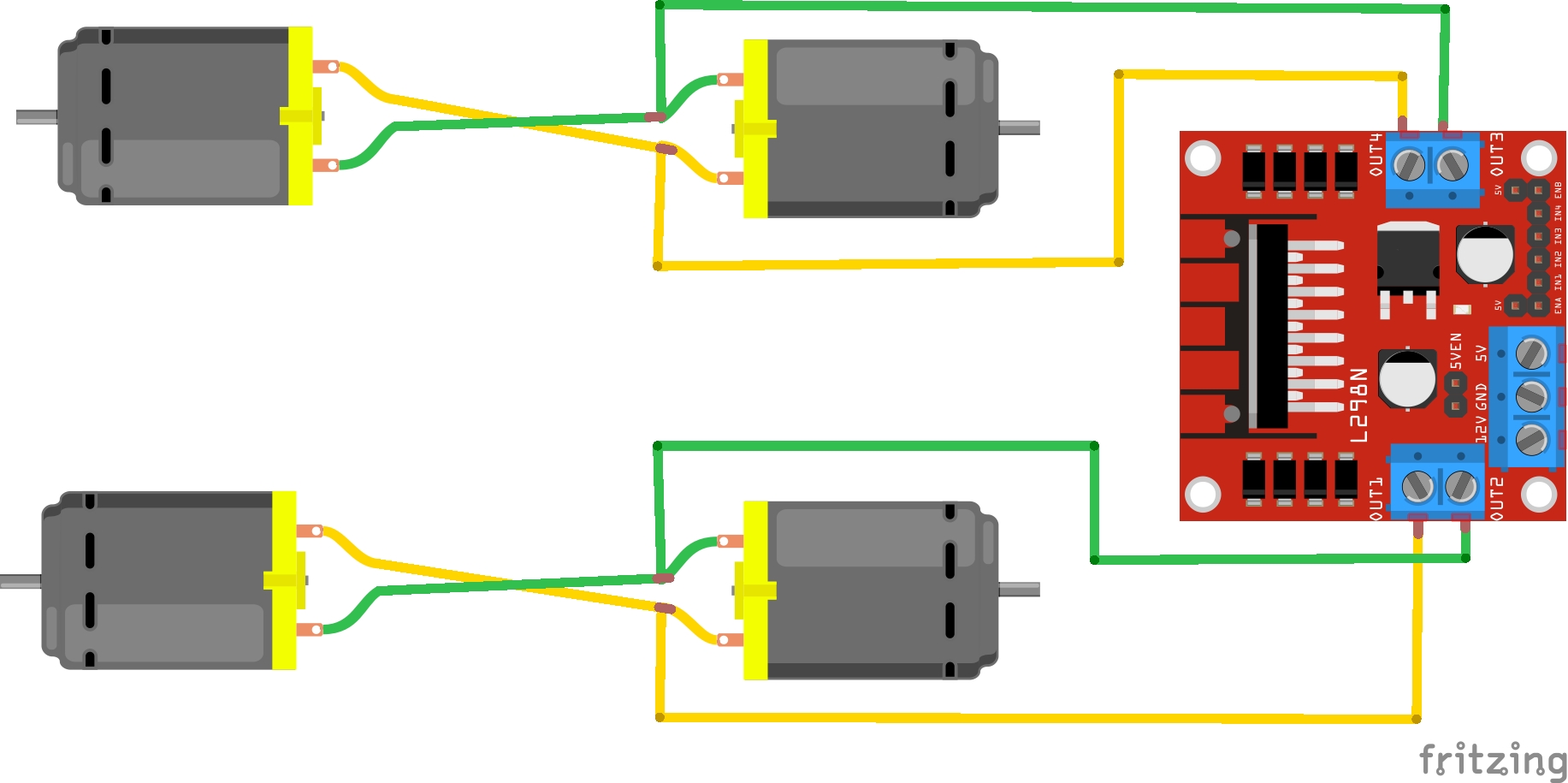
按照这张图的方法将电机的铜线接到L298N上,例如由下面的两个电机引出的有2根线,L298N对应的下面有OUT1和OUT2,至于两根线哪根接OUT1哪根接OUT2一开始都行,两种接法的区别就是电机转动的方向不一样,假如通电后电机转动的方向与设想的相反,就将两根线对调一下就可以了。
现在还不能让电机转起来,因为L298N的IN1、IN2、IN3、IN4需要单片机提供高低电平,所以等我们的STM32F103C8T6最小系统板到手之后再着手让电机转动起来。
至此第二阶段的内容告一段落,准备下一阶段的学习。
第三阶段:STM32F103C8T6最小系统板的购买与学习使用
上一阶段讲了电机驱动L298N的购买与学习使用,这一阶段主要讲STM32F103C8T6最小系统板的购买与学习使用。
按照“一.2.4).STM32F103C8T6最小系统板”的讲解购买,再按照“一.2.9). MB-102面包板”的演示买个面包板。
在等快递的时候,先按照“二、软件安装与学习”部分,安装好Keil uvision5和STM32CubeMX。
下面我们通过编写程序控制STM32F103C8T6上LED灯闪烁的实验来介绍一下,项目开发的大致流程。
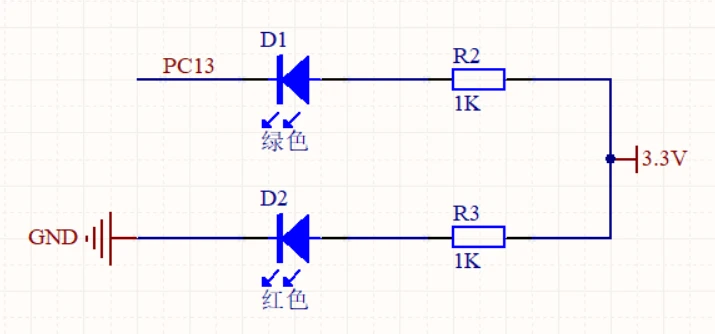
查看一下STM32F103C8T6的原理图(在**其他资料**里的“毕业设计学习资料/电路原理图/stm32f103c8t6最小系统原理图原件/stm32f103c8t6.pdf”),STM32F103C8T6上有两个板载LED灯,红色为电源指示灯,通电即亮;绿色为测试灯,右端接3.3V,左端接芯片的PC13引脚,PC13在STM32F103C8T6最小系统板的实物上并没有引出这个引脚,所以需要在代码里设置该引脚的高低电平来达到控制小灯的亮灭。当PC13为高电平时,绿色灯灭,为低电平时,绿色灯亮。我们可以在代码中设置让PC13高一会,低一会,来查看绿色灯是否为灭一会,亮一会。
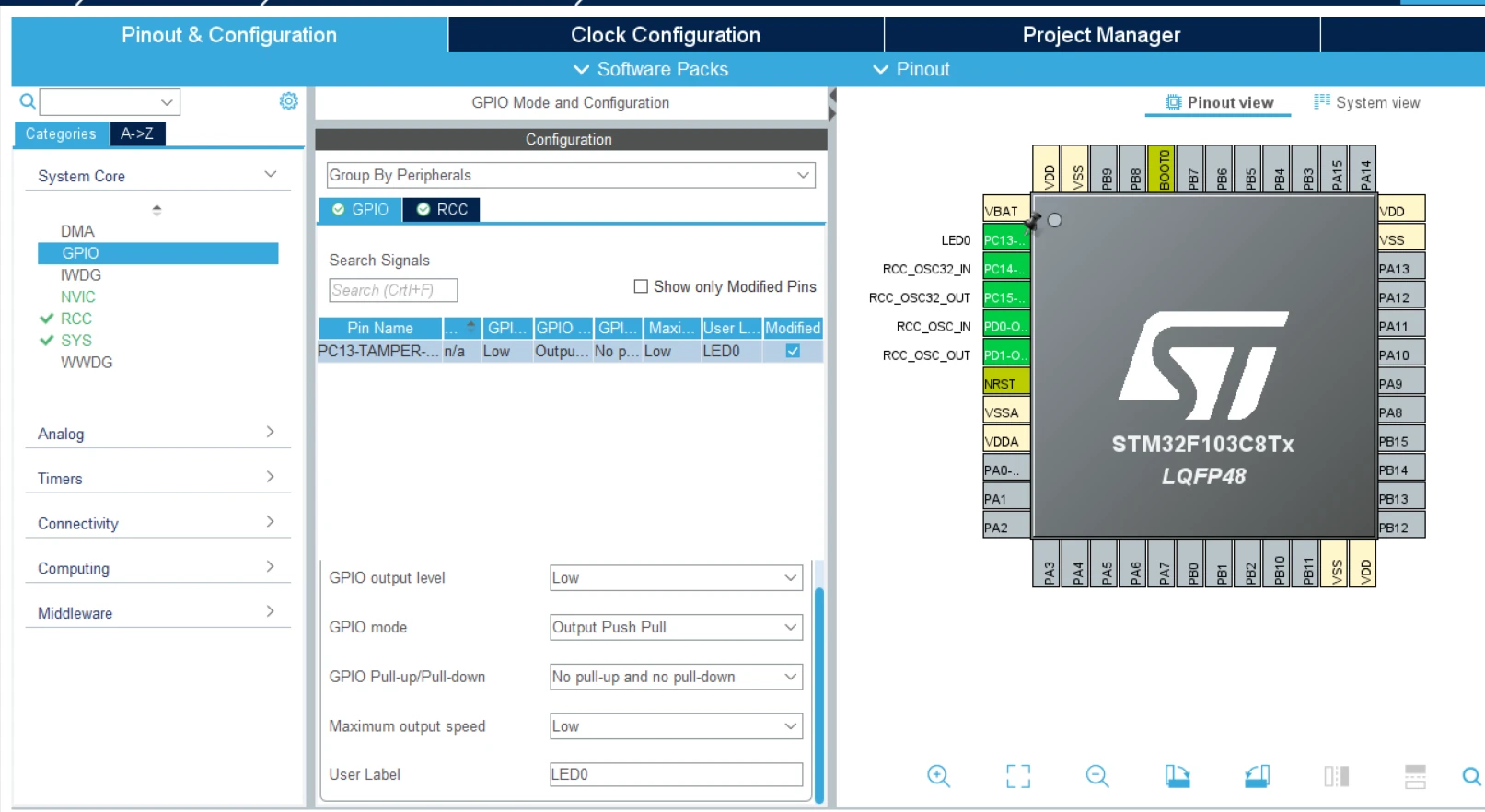
1. STM32CubeMX中的配置
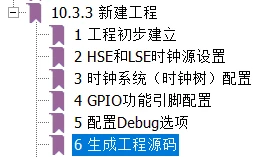
这里的配置请参考**正点原子资料**的“STM32F103 MINI开发指南V1.3.pdf”的“10.3.3 新建工程 ” 的1~6小节:
根据资料的讲解,结合本项目做出如下说明:
-
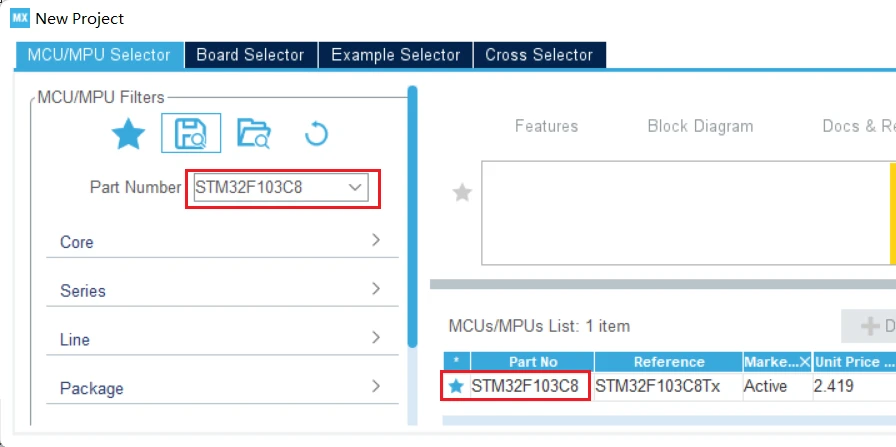
在”图 10.3.3.4 选择具体的芯片型号“ 中,我们选择的芯片型号为“STM32F103C8”
-
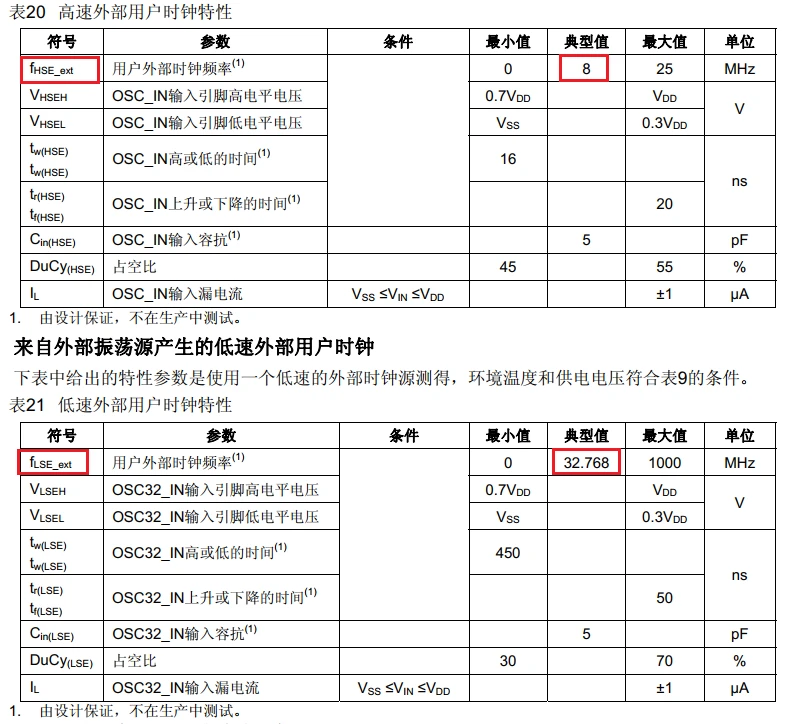
在“2 HSE 和 LSE 时钟源设置 ”部分,我们需要查看STM32F103C8T6的HSE和LSE,在**其他资料**里的“毕业设计学习资料/STM32F103C8T6参考文档/STM32F103x8B数据手册(中文).pdf”查看。结果也是外部高速晶振和外部低速晶振分别是: 8MHZ 和 32.768KHZ。
-
在“3 时钟系统(时钟树)配置 ”这节,前面讲解的是手动计算的方法,为了简单我们也已只看该节的最后一段文字:

按照这里的操作,直接在“HCLK(MHz)”位置输入72,然后按回车,就会自动进行配置。如果跳出弹窗点击ok就行。
-
在“4 GPIO 功能引脚配置”,文档里介绍的PA8 和 PD2 两个GPIO口,将PA8 设为“GPIO_Output”即GPIO输出口,在System Core 下的 GPIO 选项里配置PA8为推挽输出、上拉 、高速 、别名为 LED0。 我们配置STM32F103C8T6的板载绿色LED灯,将PC13设为 “GPIO_Output” 即GPIO输出口,在System Core 下的 GPIO 选项里配置PC13为 默认输出低电平(Low)、推挽输出(Output Push Pull)、不上下拉(No pull-up and no pull-down) 、低速(Low) 、别名为 LED0。
-
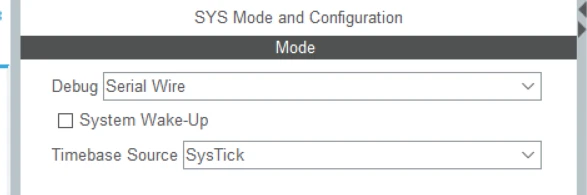
在“5 配置 Debug 选项 ”这节也有所不同,文档那里给出的是使用JTAG Debug,本项目使用Serial Wire Debug。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-tuwUiyIN-1688999686662)(https://article.biliimg.com/bfs/article/135918bd83ed5424b9e1b9511cb232b3a8c0b6ea.png)]
SWD是Serial Wire Debug的简称,翻译成中文是”串行线调试”。 SWD是ARM目前支持的两种调试端口之一,另一个调试端口叫做JTAG Debug Port,也就是我们常用的J-link上面的调试端口(JTAG模式下)。SWD是用于访问ARM调试接口的双线协议。它是ARM调试接口规范(ARM Debug Interface Architecture Specification)的一部分,是JTAG的替代品。SWD的物理层由两条线组成:SWDIO: 双向数据线;SWCLK: host驱动的时钟线
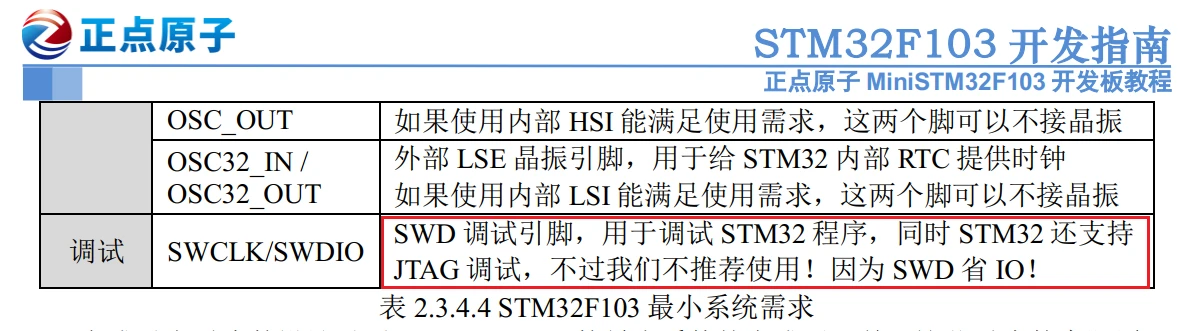
所以,我们在文档里的“图 10.3.3.14 打开 Debug 选项”的第4个标号那里选择“Serial Wire” 。
-
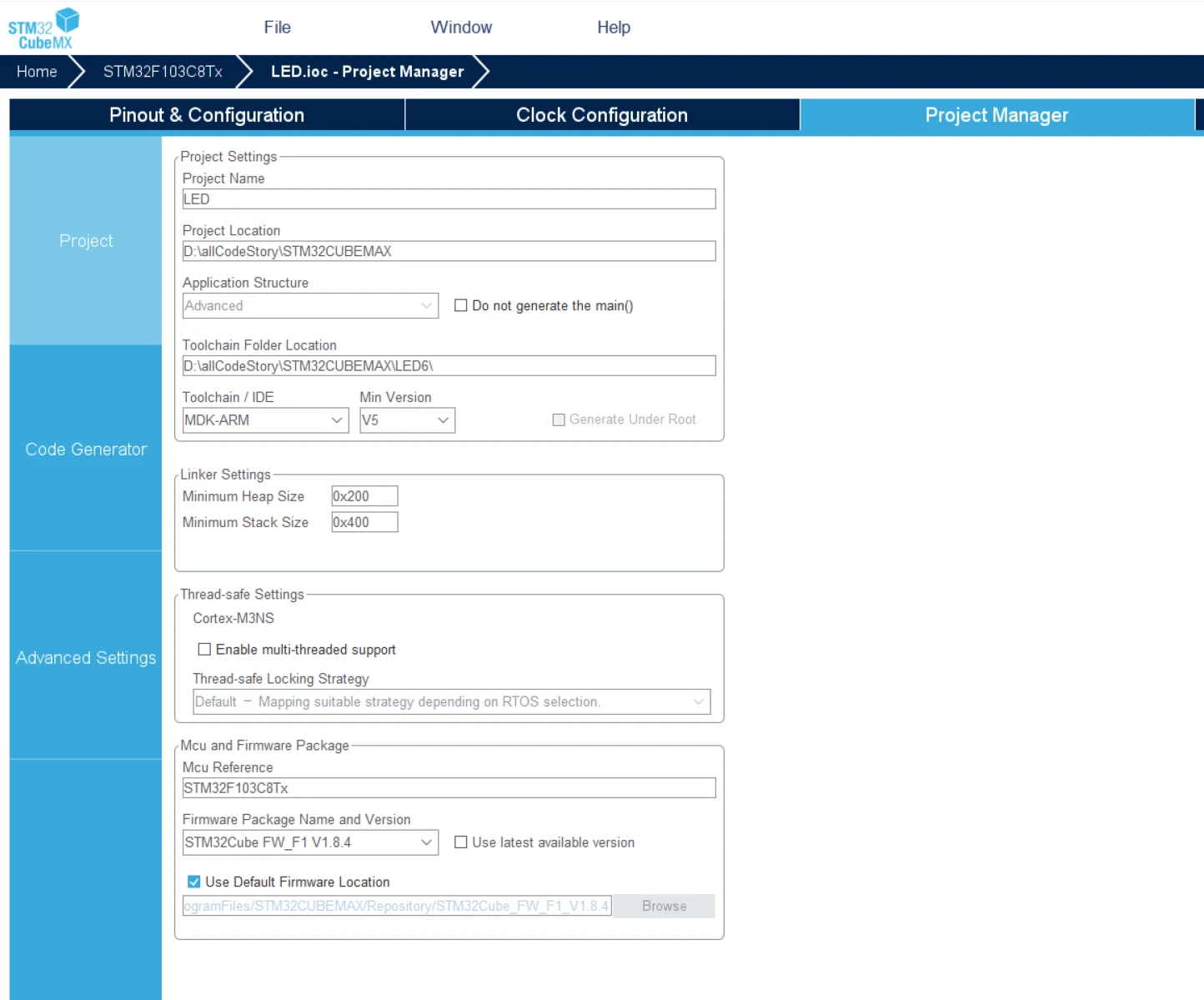
在“6 生成工程源码 ”中看图“图 10.3.3.15 工程配置 ”,序号2我们选择自己的文件保存路径,序号3我们自己设置文件名,序号4右边的”Min Version”选项我选的是“V5”(因为我的keil MDK不是最新的版本,我选个保险点的V5,事实证明,这样选没事),其他的和文档里的一样配置。我给出我的配置页面:
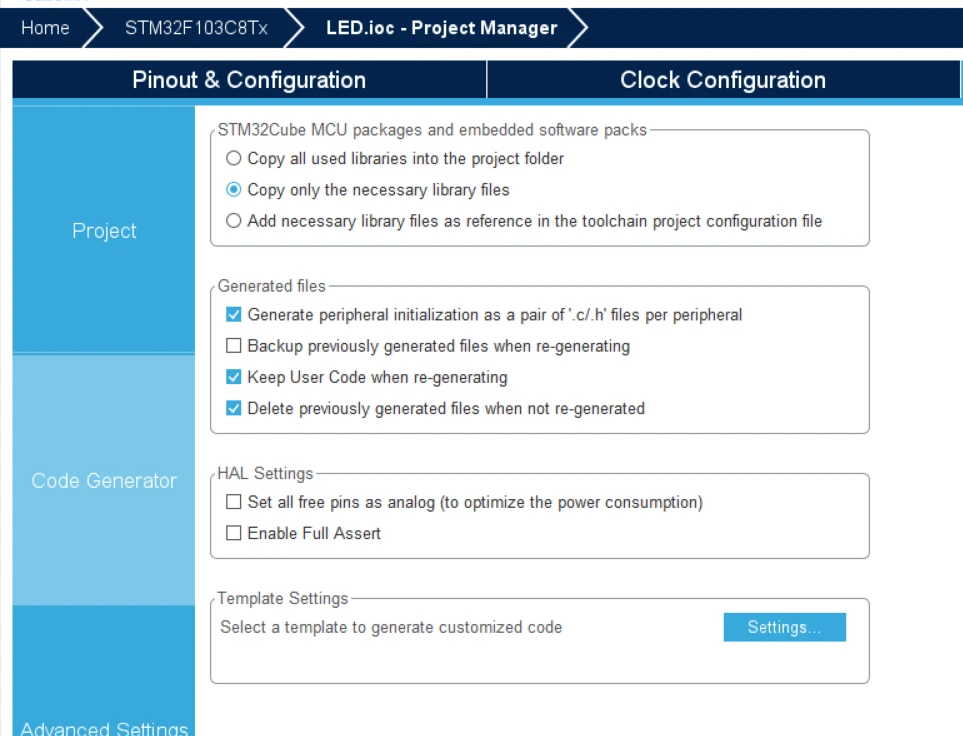
错误解决
提醒我们它想用V1.8.5版本的固件包,但是我们没有,它问我们需要下载吗?

这种情况下果断选择“No”,先来搞清楚一下,我们之前安装过固件包,如果你按照正点原子的开发指南的文档安装的STM32CubeMx的固件包,它安装的是V1.8.3版本;如果你按照我给的方法安装的STM32CubeMx的固件包,我安装的是V1.8.4版本。无论如何我们都安装过了,我们想要它使用我们安装过的固件包生成代码。所以就查看一下生成工程源码的配置界面有没有关于固件库版本的设置。
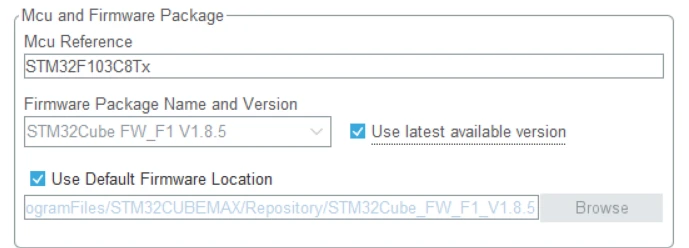
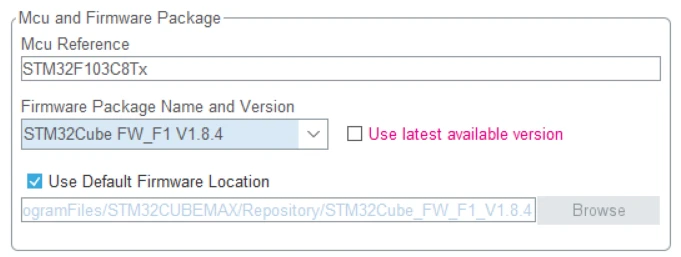
在“Project”选项页面的下面可以看到上面这张图,默认勾选的“Use latest available version”。我们把勾去掉,选择我们安装过的固件库版本,如下图:
至此在STM32CubeMx中的工作就做完了,我们页得到了生成项目基本框架。准备下一步在keil中编写代码。
2. Keil uvision5中的操作
在Keil中的操作请参考**正点原子**资料的“STM32F103 MINI开发指南V1.3.pdf”的“10.3.3 新建工程 ” 的第7小节:用户程序
大致说明的是根据前面在STM32CubeMx中的操作生成的项目文件,我们点击编译,正常情况下会显示编译通过,然后我们编写代码要在注释的 BEGIN 和END 之间编写代码,这样重新生成工程之后,这些代码会保留而不会被覆盖(我们可能在编写一部分代码之后重新到STM32CubeMx添加配置新的引脚,所以需要再次生成工程)。
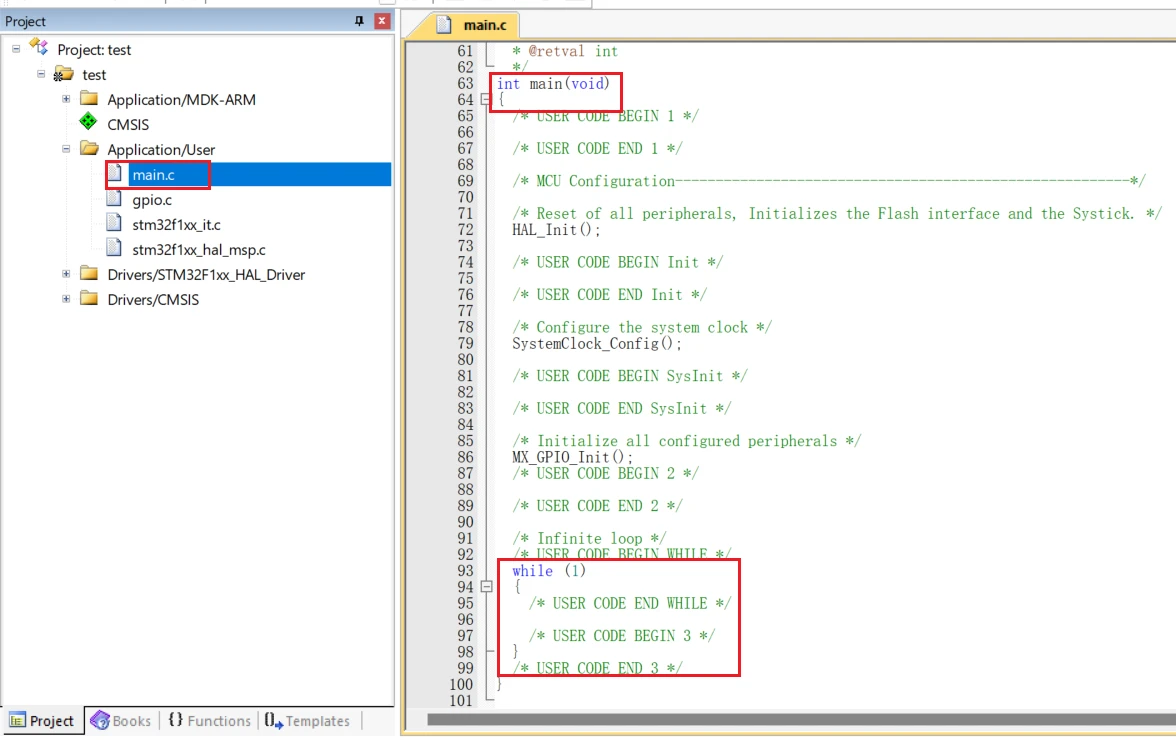
代码我们不用抄文档里代码,我给出一段控制STM32F103C8T6板载LED绿色小灯的代码:
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);//PC13引脚电平翻转
HAL_Delay(100);//延迟100ms
}
我们打开工程,来到”Application/User”目录下,打开“main.c”文件,将main函数中的while(1){}段更换为上面给出的代码,然后点击编译。
烧录参数配置
这里的配置请参考**正点原子资料**的“STM32F103 MINI开发指南V1.3.pdf”的“8.1.4 魔术棒设置 ” 的1~6小节:
根据资料的讲解,结合本项目做出如下说明:
文档里没讲“Device”、”User“、“ASM”、“Linker”该怎么设置,保持默认不修改就好。
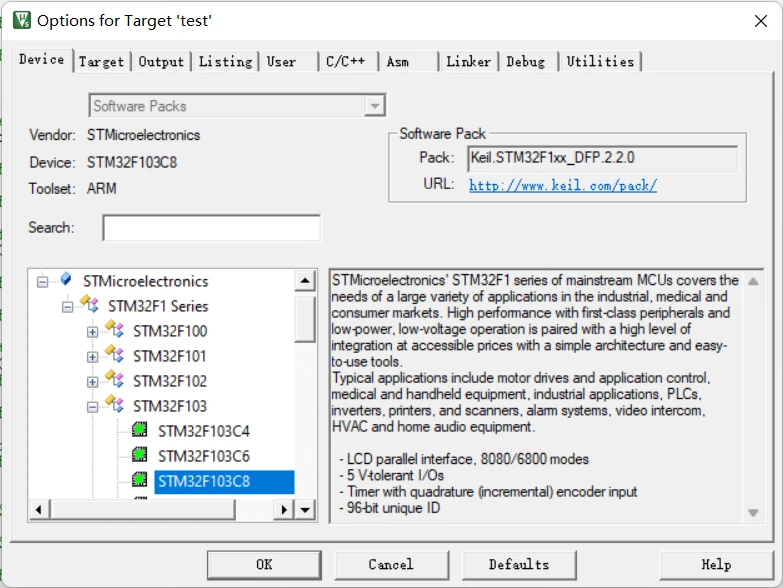
在“Device”一栏主要是选择芯片,核实一下是不是STM32F103C8系列的芯片就行,如下图所示。
Device选项卡详细界面各项介绍请看官方说明:µVision User’s Guide (arm.com)
”User“一栏不用改。
User选项卡详细界面各项介绍请看官方说明:µVision User’s Guide (arm.com)
ASM选项卡详细界面各项介绍请看官方说明:µVision User’s Guide (arm.com)
Linker选项卡详细界面各项介绍请看官方说明:µVision User’s Guide (arm.com)
-
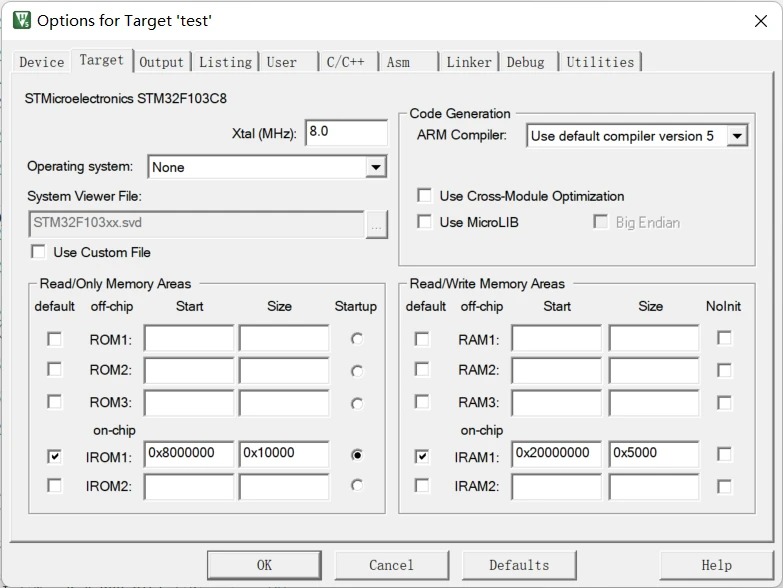
在“设置 Target 选项卡”小节里,我项目的设置和文档一致,如下图:
Target选项卡详细界面各项介绍请看官方说明:µVision User’s Guide (arm.com)
Xtal为外部晶振时钟设置,该项只影响仿真结果。On chip ROM设置为定义存放程序的flash的首地址及可用空间大小,当有IAP和APP时,两个的ROM的地址及空间要分开。RAM设置为定义程序所用的RAM的首地址及可用空间大小。
-
在“设置 Output 选项卡 ”小节里,我们可以不用修改,保持默认的就行,默认的设置如下图。
Output 选项卡详细界面各项介绍请看官方说明:µVision User’s Guide (arm.com)
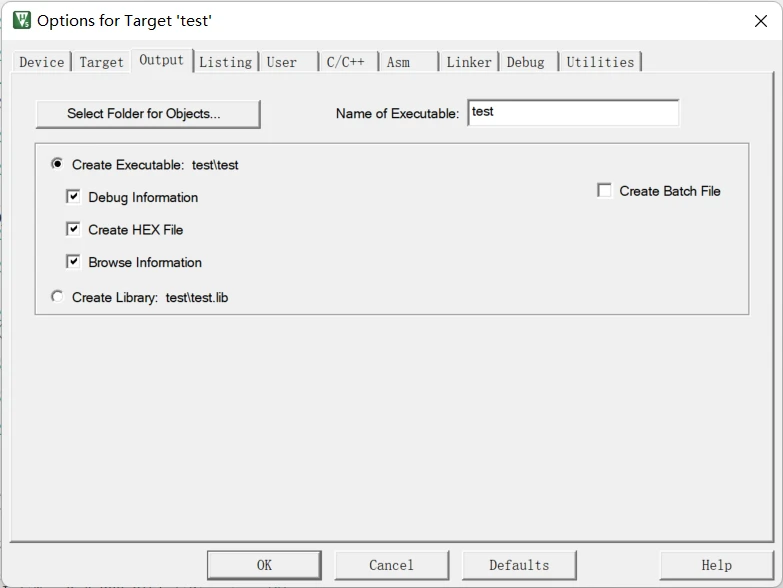
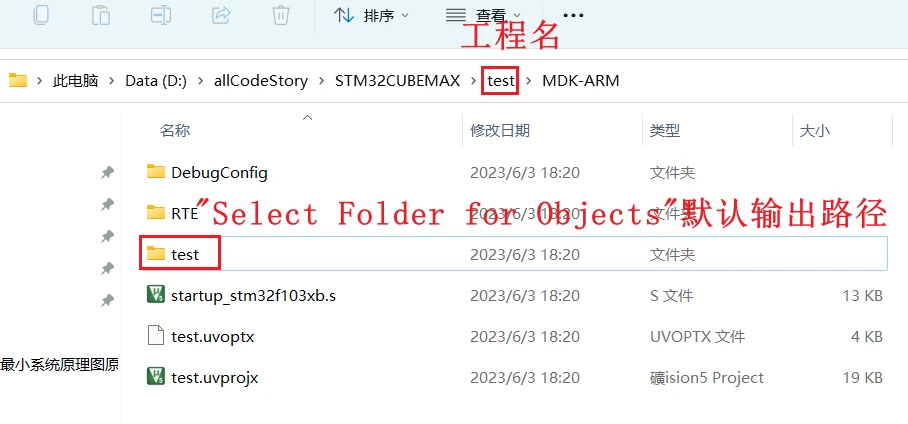
当我们通过STM32CubeMx生成项目开发的基本框架时,会在工程项目的MDK-ARM文件夹下建立一个与工程同名的文件夹用于存放编译产生的调试信息、hex文件、预览信息、封装库等。编译输出文件,如下图所示,至于“Select Folder for Objects”选项,默认情况下就是下图中的”test“文件夹(工程名不同,此问价夹名称不同)。文档里之所以提醒将“Output”和“Listing”两栏中的“Select Folder for Objects”选项选择output文件夹,是因为文档的“8.1.4 魔术棒设置 ”小节的讲解不是基于STM32CubeMx生成的基本框架代码讲解的,我们往前翻一番可以看出(“8.1.2 新建一个工程框架 ”),它的项目基本框架都是在keil中新建生成,与我们使用的STM32CubeMx生成的基本框架有所区别。
总结一下:本项目的“Output”和“Listing”两栏使用默认的就好,不用修改里面的参数。
-
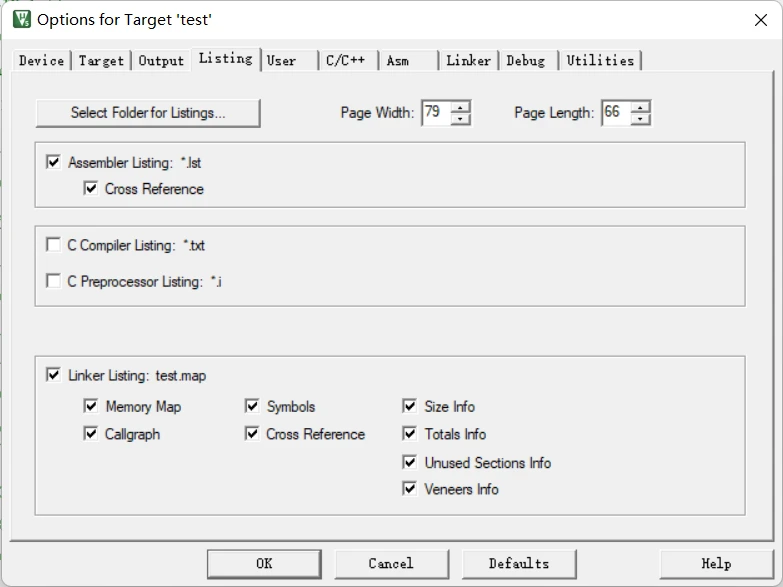
在“设置 Listing 选项卡 ”小节里,如果我们不点击“Select Folder for Listings”对输出路径进行设置,它的默认输出路径也是在output那里提到的test文件夹。所以这里我们不动就好。
Listing 选项卡详细界面各项介绍请看官方说明:µVision User’s Guide (arm.com)
界面如下:
-
在“设置 C/C++选项卡 ”小节里,配置界面如下:
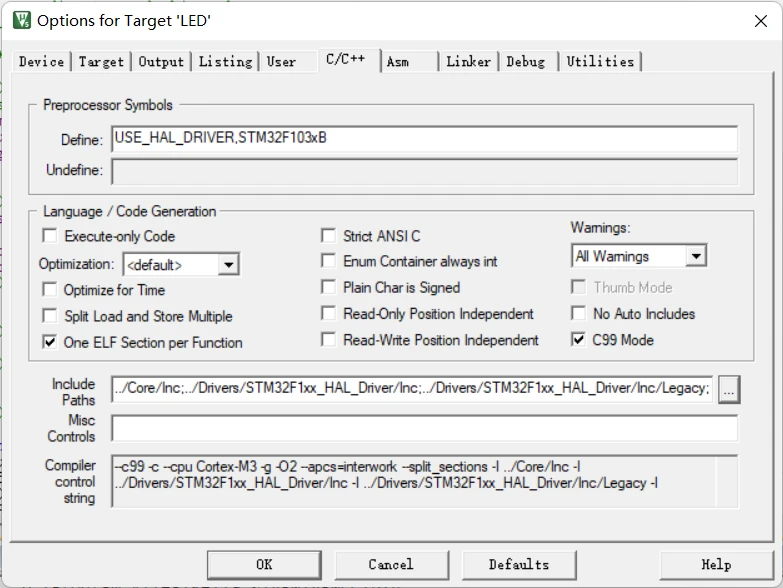
“图 8.1.4.4 设置 C/C++选项卡 ”中序号2保持默认的就行;关于“图 8.1.4.4 设置 C/C++选项卡 ”中序号3优化等级的选择,可以看一下这篇介绍:(115条消息) 对 keil Mdk 优化等级的理解_keil优化等级_zhuimeng_ruili的博客-CSDN博客 文档里选择的是“Level 0(-O0)”,我选的是“<default>”,这两个都可以。序号5“设置头文件包含路径”,一开始我们不需要改动,保持默认的就行,如果后来我们为了实现某个功能,在项目中新建了一些“.c”和“.h”文件,可以把我们建立的“.h”文件的路径加入到这里。
例如:为了实现小车运动的控制,我新建了两个文件(thread_run.c和thread_run.h),在main.c中需要包含“thread_run.h”这个头文件,
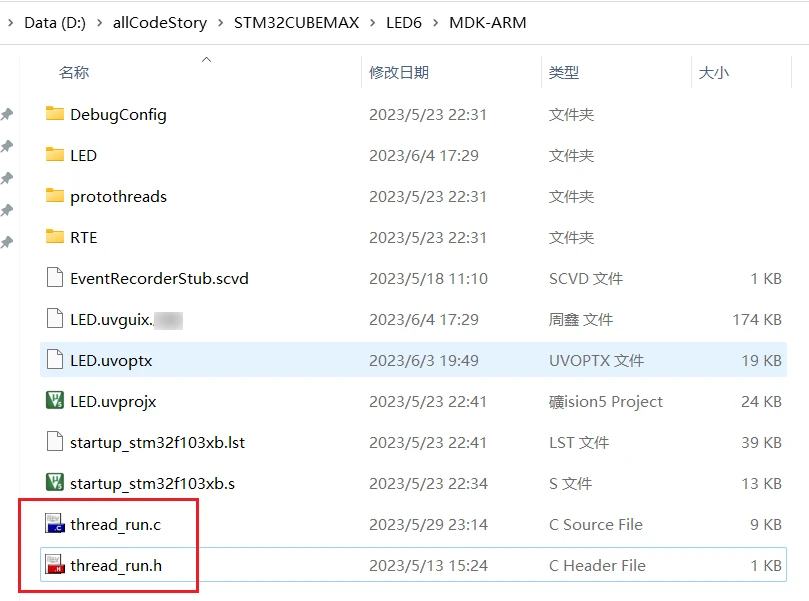
如果直接在main.c中写#include “thread_run.h”,会报错:“fatal error:’thread_run.h’ file not found”。
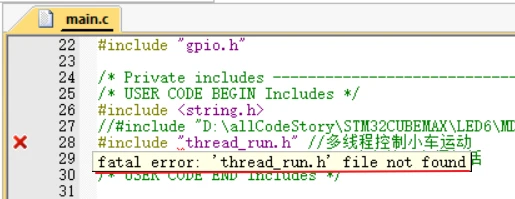
这时候我们就需要在”C/C++”那栏的“includes paths”里添加该头文件的所在文件夹的相对路径,下面是添加之前的样子,我们照着样子给加上。
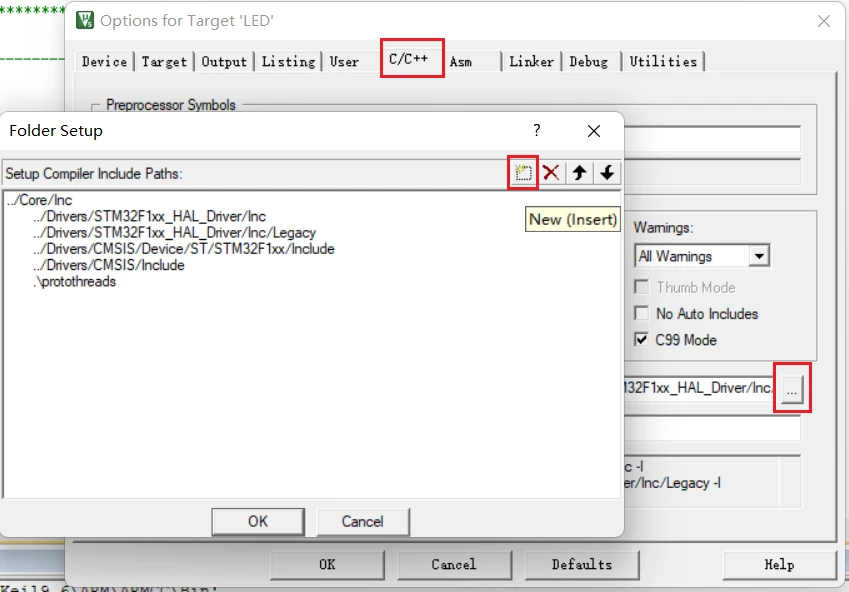
加上…/MDK-ARM,之后就看到报错消失了,编译也没报错。(找这么看在我们没添加这个路径之前给我们报错也可能说明我们新建的这俩文件thread_run.c和thread_run.h也许没放对地方,如果我们保存在原有的头文件包含路径里,也就不会报错)
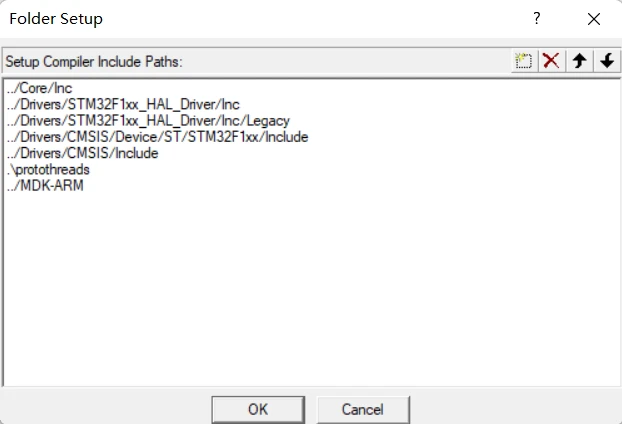
C/C++选项卡详细界面各项介绍请看官方说明:µVision User’s Guide (arm.com)
-
在“设置 Debug 选项卡 ”小节里,本项目和文档里的配置一致,配置结果如下:
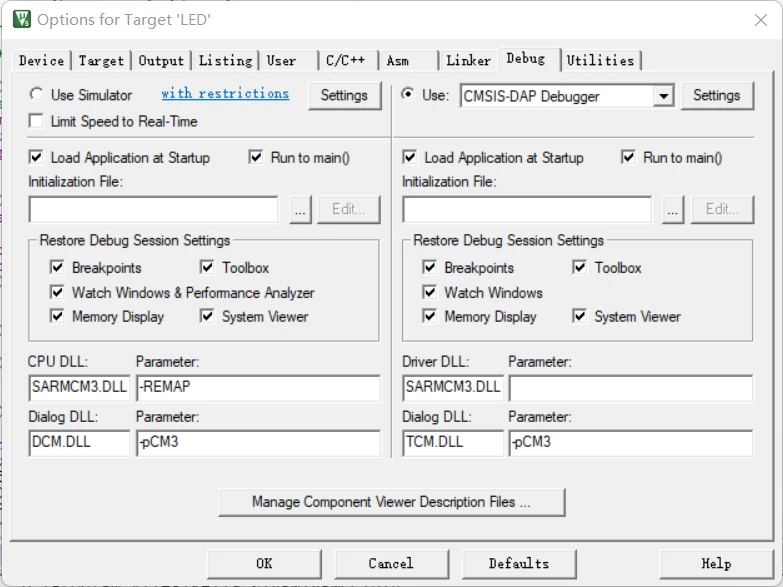
此选项卡界面被中间一条竖线一分为二,左边是软件调试,右边是硬件调试,两边参数选项种类相同。使用软件调试可以观看PWM输出波形,烧录程序时必须设置成硬件调试。
我建议先看一下Debug 选项卡详细界面各项介绍请看官方说明:
µVision User’s Guide (arm.com)
µVision User’s Guide (arm.com)
关于“选择用于调试目标硬件的驱动程序”及其有右边的“Setting”设置的介绍:CMSIS-DAP Debugger User’s Guide (arm.com)
此选项卡最主要的配置就是硬件调试的“选择用于调试目标硬件的驱动程序”及其有右边的“Setting”设置。
在“一.3.8)PWLINK2 Lite 调试下载器“部分讲了stm32单片机常见的下载器有哪些,买的下载器不同,“选择用于调试目标硬件的驱动程序”那里选择也不同,我买的PWlink,使用的DAPLink的方式进行烧录,所以我选择“CMSIS-DAP Debugger”
烧录器类型 选项 学习链接 stlink ST-Link Debugger daplink CMSIS-DAP Debugger CMSIS-DAP Debugger User’s Guide (arm.com) jlink J-LINK/J-TRACE Cortex usb转ttl 不用设置,usb转ttl不使用keil烧录 -
在“设置 Utilities 选项卡 ”小节里,本项目和文档里的配置一致,配置结果如下:
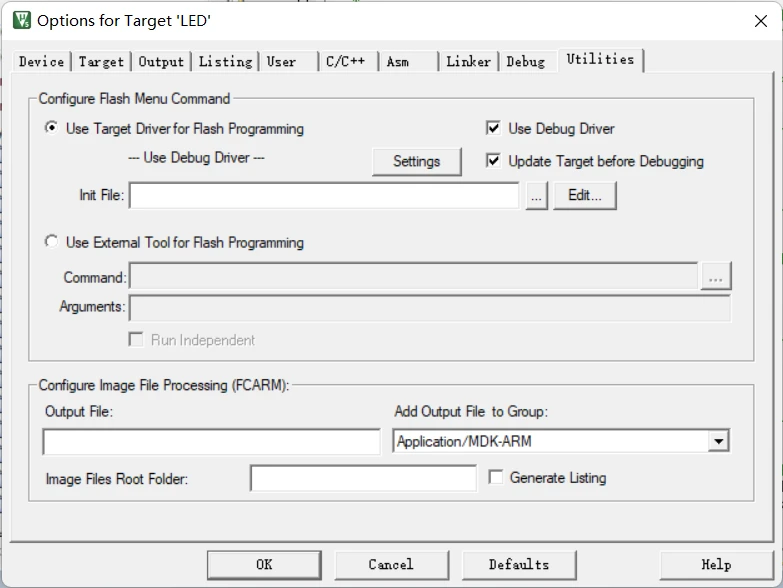
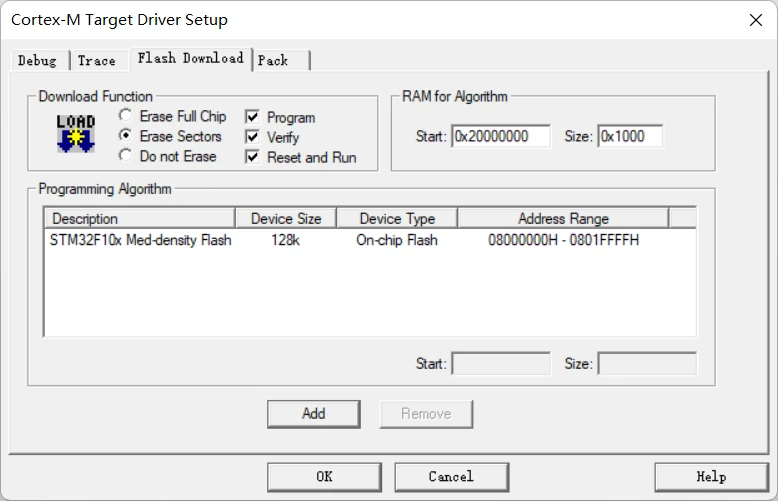
补充:
Utilities选项卡里默认的选项如下图所示,文档中的配置相较于默认配置,只多勾了个“Reset and Run”,这个选项可以帮助我们每次点击烧录之后自动地“按”一下复位键,使板子中地程序重新启动。如果不勾选此项,我们每次烧录完需要手动按一下板子上地Reset按钮,板子才能正常工作。
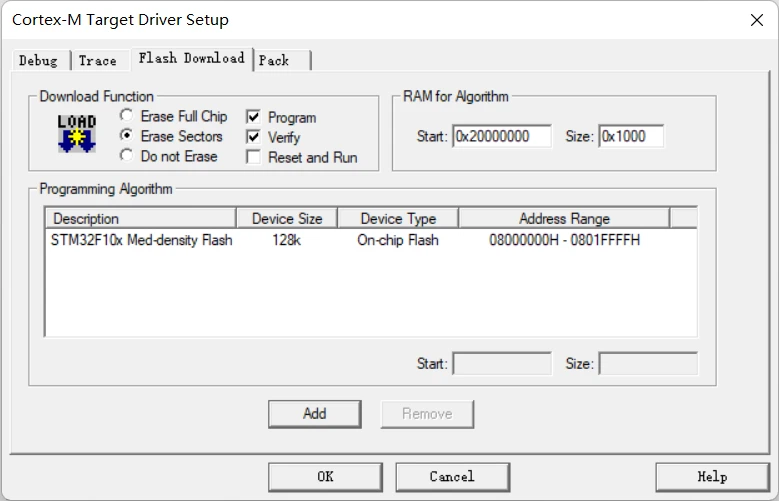
到这里恭喜你,你已经学习了很多知识,在STM32CubeMx和Keil中的配置基本完成,之后如果需要修改也只是微调,很多东西设置完一次后面就不用再改了。现在,我们已经使用STM32CubeMx生成了项目开发的基本框架,又到keil中编写了控制STM32F103C8T6最小系统板板载绿色LED每隔100ms闪烁一次的程序,在keil中的编译,调试,烧录选项也已经配置好了,接下来拿出我们的烧录器(我买的PWLINK Lite2),将烧录器一段与STM32F103C8T6最小系统板连接,一端与电脑连接,看一眼“Debug-Settings-SW Device”那里有没有检测到设备:
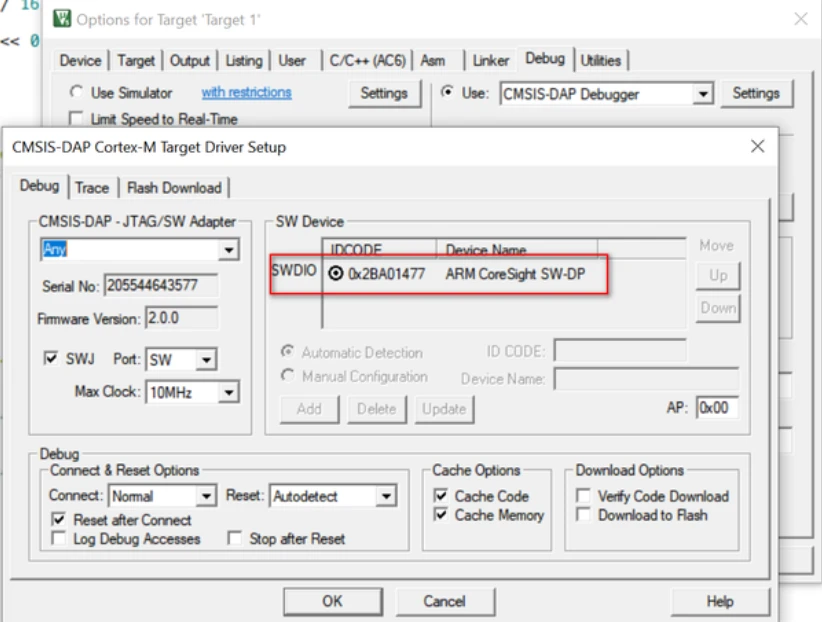
如果有,我们先点击部分编译按钮,再点击烧录按钮,如下图。
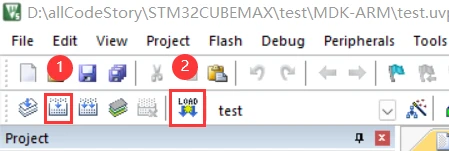
若烧录成功,你会看到绿色板载LED灯如期闪烁。
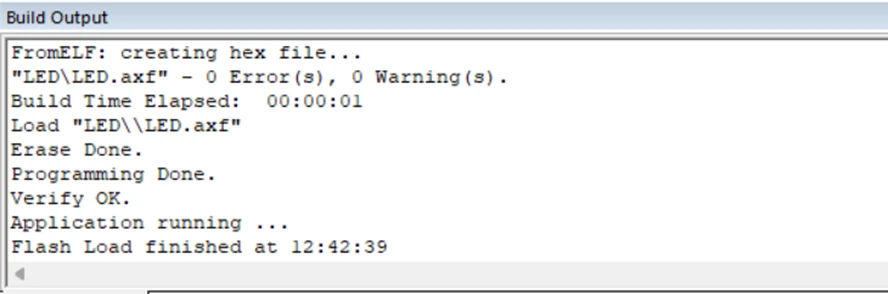
补充:
如果烧录时报如下错,可以看一下这篇文章:(115条消息) STM32F103C8T6程序烧录方法_stm32f103c8t6烧录_流浪法师解剖鱼的博客-CSDN博客
如果对于烧录时STM32F103C8T6最小系统板的两个BOOT引脚(boot0,boot1)的跳线帽如何放置还有疑问,
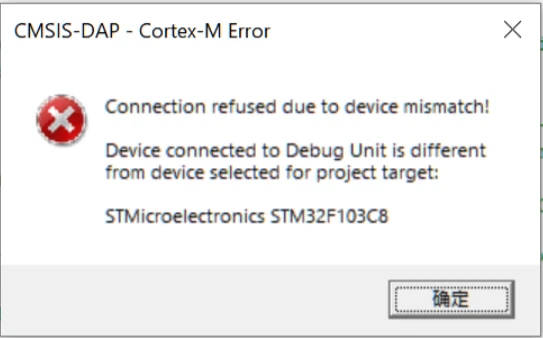
至此第三阶段的内容告一段落,准备下一阶段的学习。
第四阶段 让小车全速动起来
上一阶段讲了给STM32烧程序,控制小灯闪烁,这一阶段主要讲配置单片机的四个GPIO口,连接电机驱动和电机,调试一下电机转动。
1. 电机控制实现
如果给电机调速,使用四个GPIO口,连接L298N电机驱动的IN1,IN2,IN3,IN4四个接口,就可以驱动电机全速正反转。
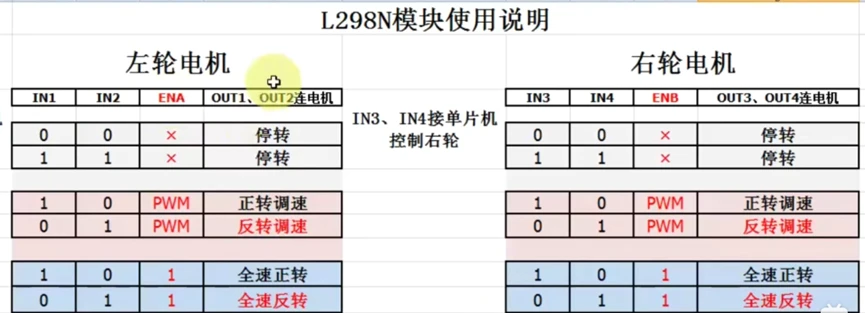
先来在STM32上选出4个GPIO口,参考“一.3.4).STM32F103C8T6最小系统板”的一张图:STM32F103C8T6引脚定义表
2. 电机控制在STM32CubeMx中的配置
打开工程目录下的“.ioc”文件
做如下配置:
| STM32上的GPIO口 | 功能 | IO口输出方式 |
|---|---|---|
| PA10 | IN1 | Output Push Pull(推挽输出) |
| PA9 | IN2 | Output Push Pull(推挽输出) |
| PB9 | IN3 | Output Push Pull(推挽输出) |
| PB6 | IN4 | Output Push Pull(推挽输出) |
先在芯片图上选择PA10、PA9、PB9、PB6的GPIIO模式为输出模式:
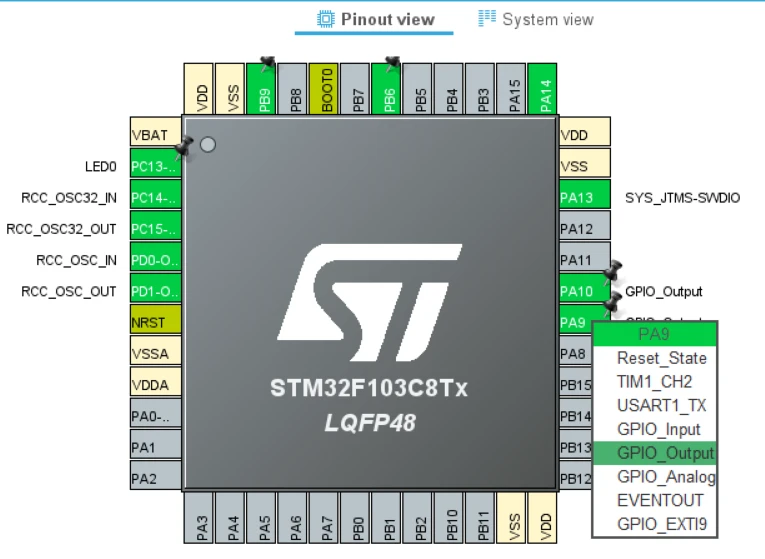
再来到“System Core-GPIO”,对PA10、PA9、PB9、PB6进行配置,默认情况下这些IO口都是初始输出低电平、推挽输出、不上拉不下拉、Maximum output speed:Low,我们只要给每个IO口设个User Lable就行。
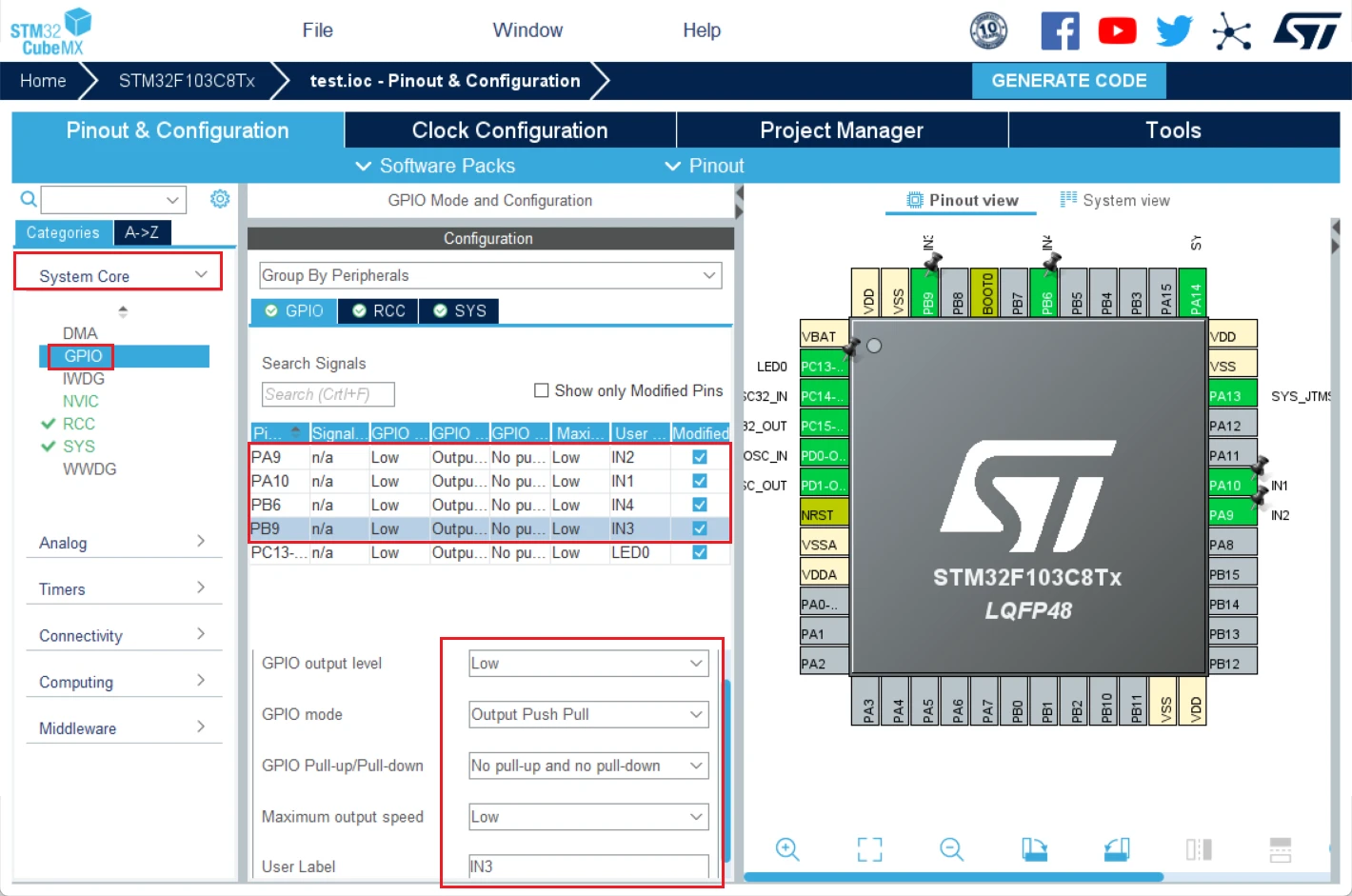
照着上图配置好之后,点击“GENERATE CODE”按钮生成代码,之后“Open Project”。
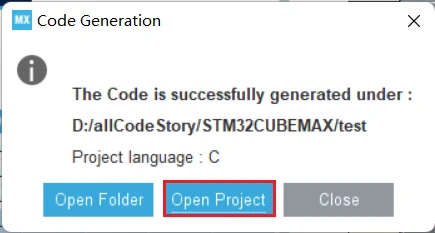
3. 在Keil中编写控制小车运动的代码
打开之后我们可以看到上次编写的代码,注意:一定要将代码写在BEGIN 和END之间,不然下次我们点击“GENERATE CODE”按钮生成代码时,之前没有写在BEGIN 和END之间的代码会消失。
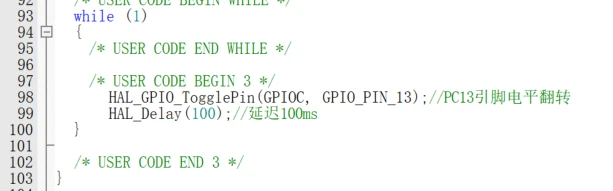
在编写控制小车全速正反转的代码之前,先来认识一下HAL库开发的一些基础函数,参考(118条消息) STM32cubeide中文笔记_小 羊 君的博客-CSDN博客:
//PA5设置高电平、低电平
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);
//引脚别名为LED的引脚io口输出低电平
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_RESET);
//延时200ms,单位ms
HAL_Delay(200);
//PA5引脚状态翻转:1变0,0变1
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5);
//读取PQ10口电平状态
HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_10);
除此之外,如果想学习或查询全面的函数知识,ST 官方给我们提供了快速查找 API 函数的帮助文档。在路径:
“ STM32Cube_FW_F1_V1.8.4\Drivers\STM32F1xx_HAL_Driver” 下有几个 chm 格式的文档,如下图

参考这两篇文章
((118条消息) STM32不同容量,标准库和HAL库对应的启动文件总结:_stm32小容量启动文件_小飞侠123!的博客-CSDN博客
(118条消息) STM32F103小容量、中容量和大容量单片机介绍_stm32f103r6单片机介绍_王小琪0712的博客-CSDN博客)
得知STM32F103C8T6和STM32F103xB被归为中等容量产品,固件库里没有STM32F103x8的.chm文件,我们可以参考STM32F103xB的.chm文件,打开“STM32F103xB_User_Manual.chm”。
作为新手,我只是用到一些基本函数,有不理解的地方就到里面去搜函数名,看里面的介绍。
正点原子的开发指南也介绍了这部分如何使用,具体操作请参考**正点原子资料**的“STM32F103 MINI开发指南V1.3.pdf”的“7.3.2 HAL库文件介绍” 的第86页下方开始:
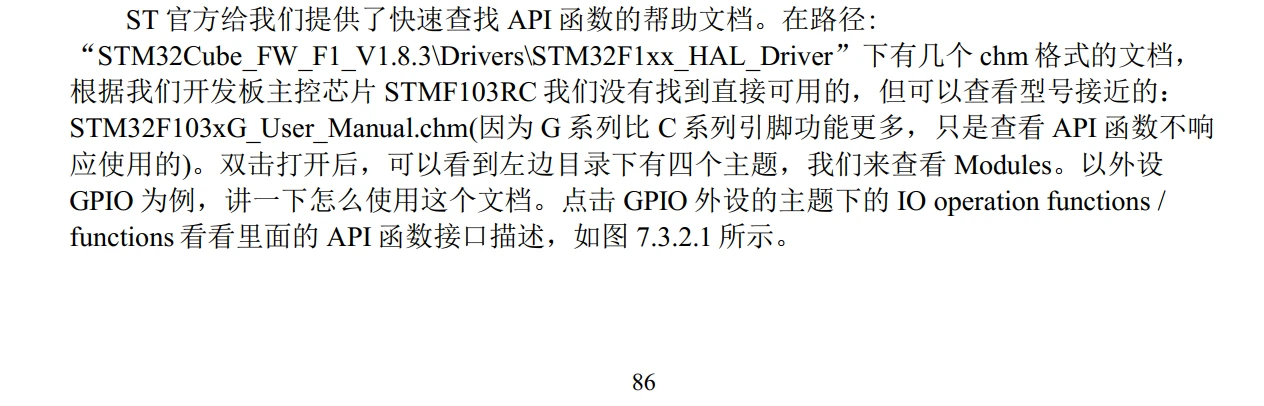
这几个函数用的挺多的
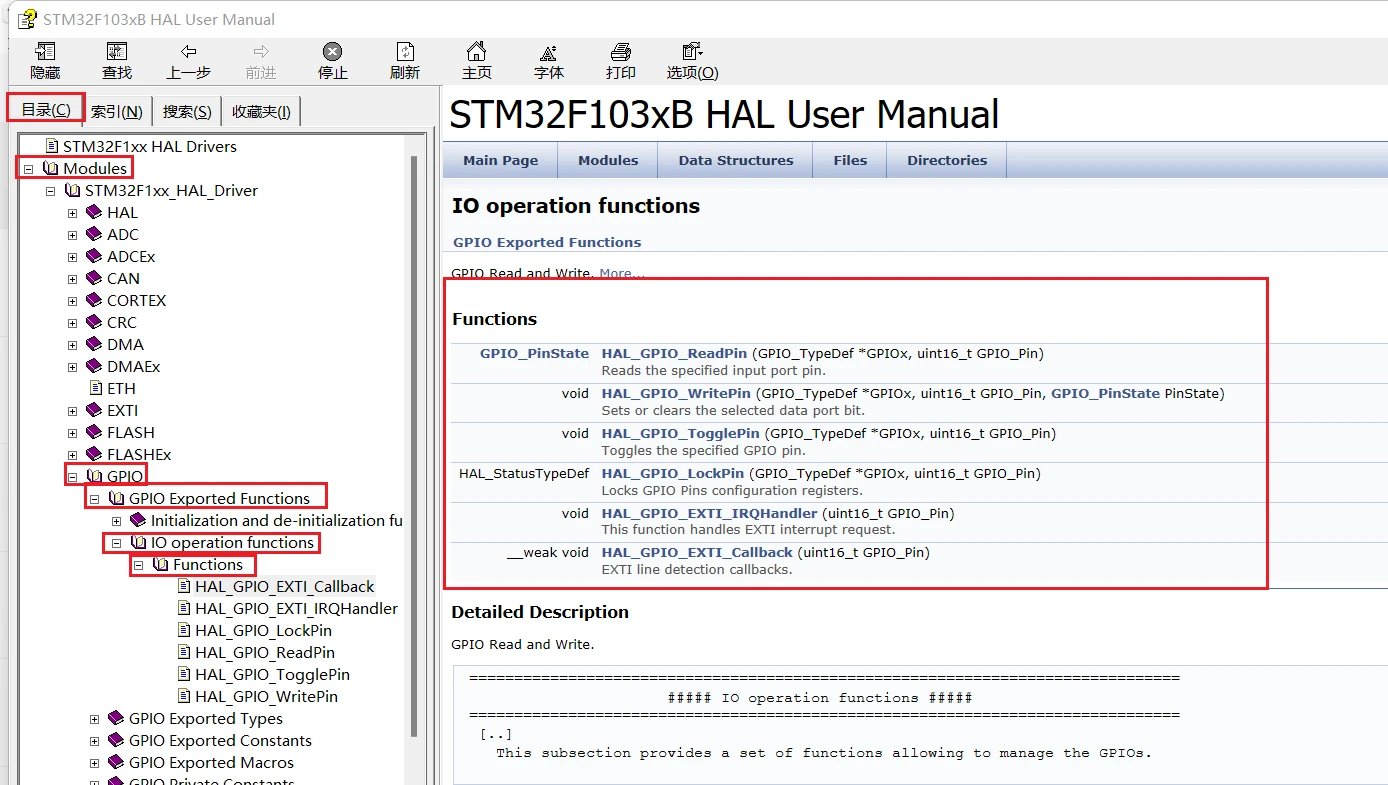
main.c中编写的控制小车运动的代码如下:
/* USER CODE BEGIN 0 */
void Forward()
{
//左正转
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_10, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_9, GPIO_PIN_RESET);
//右正传
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);
}
void Backward()
{
//左反转
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_10, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_9, GPIO_PIN_SET);
//右反传
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);
}
void Leftward()
{
//左反转
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_10, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_9, GPIO_PIN_SET);
//右正传
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);
}
void Rightward()
{
//左正转
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_10, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_9, GPIO_PIN_RESET);
//右反传
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);
}
/* USER CODE END 0 */
将上面我们自己编写的函数放在“USER CODE BEGIN 0”和”USER CODE END 0“之间
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
main函数中的While(1)循环更改为下面代码:
while(1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);//板载绿色LED小灯引脚电平反转
Forward();
HAL_Delay(1000);
Leftward();
HAL_Delay(1000);
Rightward();
HAL_Delay(1000);
Backward();
HAL_Delay(1000);
}
然后点击部分编译,编译成功。
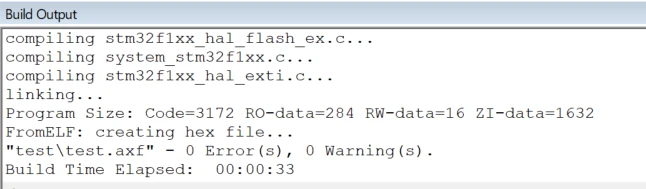
接着准备烧录到STM32F103C8T6中,因为之前已经弄过使用PWlink烧录的参数配置,这次烧录直接用PWlink连接电脑和STM32F103C8T6之后,再编译一遍无误后就可以点击烧录。
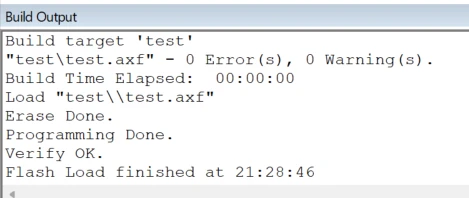
4. 实物连接并通电测试
烧录完开始进行实物的连接,之前已经给四个tt直流电机焊接好电线,并各引出两根引线接到L298N的OUT1、OUT2、OUT3、OUT4上,
电池采12V锂电池供电,L298N的GND引出两根线,一根与锂电池连接,一根接到面包板上与stm32f103c8t6的GND连接。L298N供电方式如下:
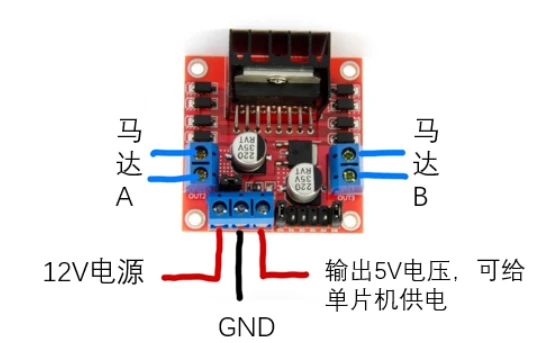
实物图如下:
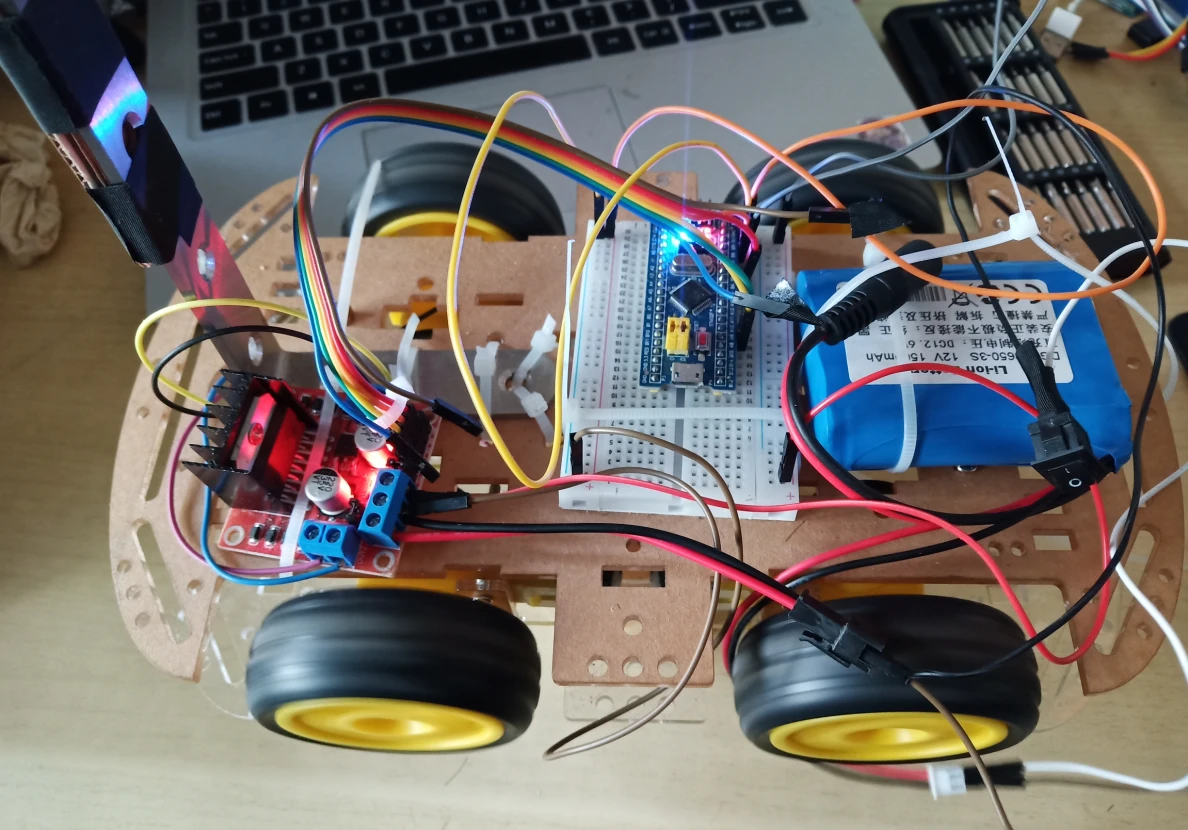
至此第四阶段的内容告一段落,准备下一阶段的学习。
如果采用充电宝给L298N电机驱动供电,实物连接图如下:
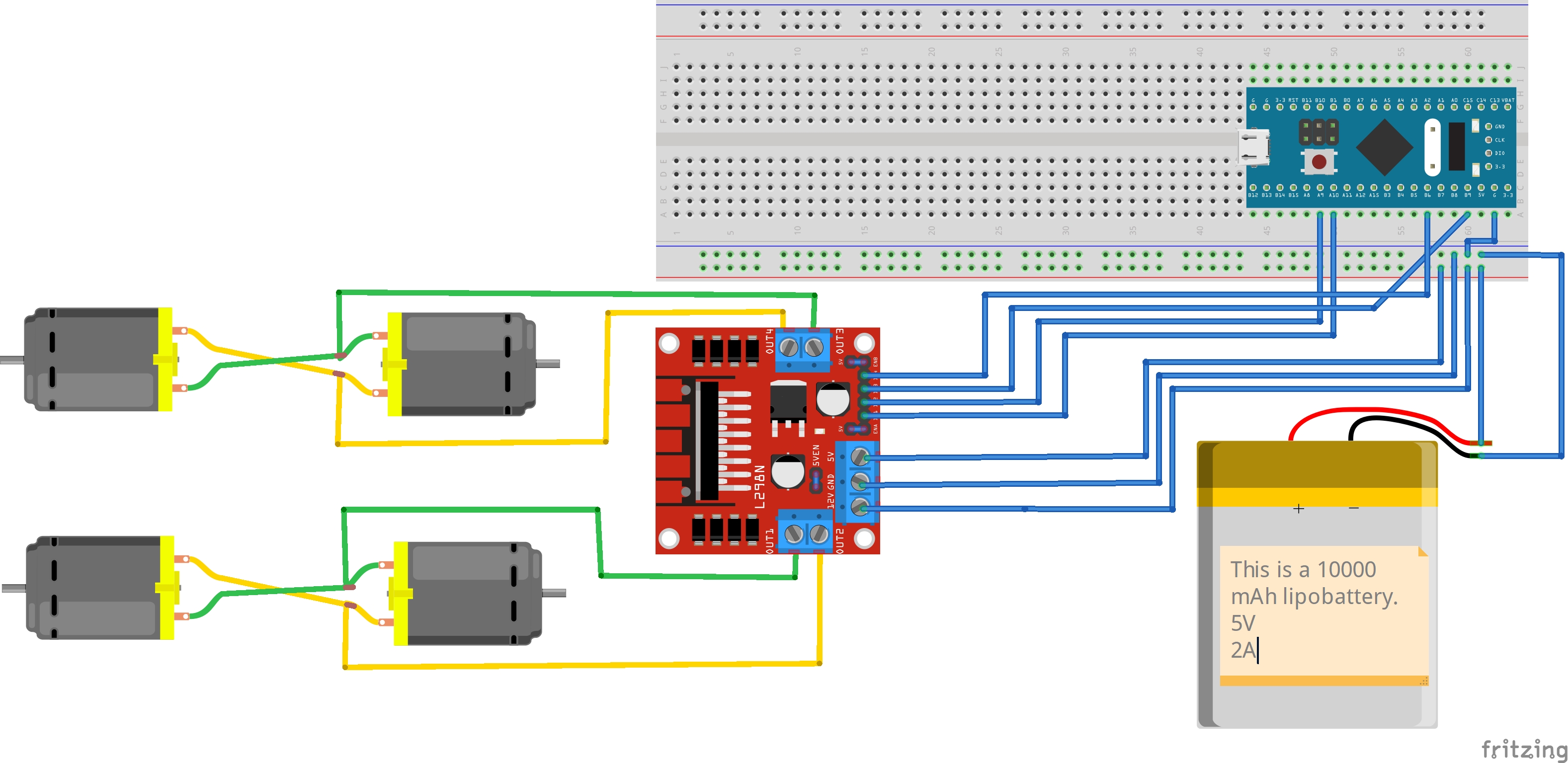
我们可以发现,小车的车轮转动缓慢,感觉上这种速度只有使用12V锂电池供电时的30%(目测),这还是小车上没加啥东西的情况,如果到了后期,随着零件的增多,小车的重量也将增大,运动时所受摩擦力也增大,到时候可能会卡住不动,所以我经实验建议使用额外的12V锂电池供电。
实物图如下:
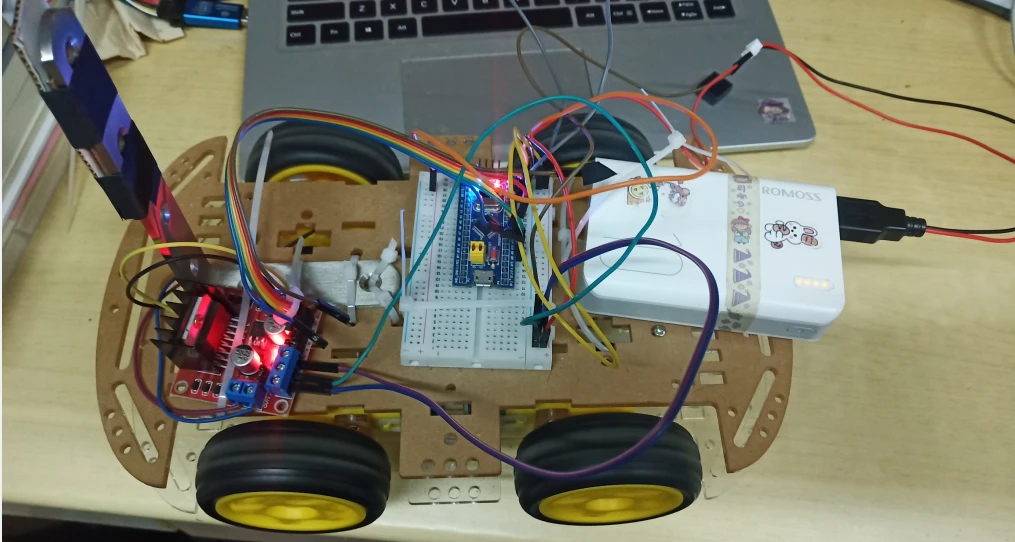
第五阶段 PWM给小车调速
上一阶段讲了如何使小车全速地正转、反转、左转、右转,但没办法调速,这一阶段主要讲如何使用PWM给小车调速。
1. PWM常见输出方式
1.新手(菜鸟)级别while循环中,阻塞延时,控制IO口高低输出:
阻塞延时可以是:软件模拟延时,定时器阻塞延时等。
2.入门(初级)级别while循环中,非阻赛延时,控制IO口高低输出:
非阻赛延时可以是:定时器标识检测、RTOS(系统)延时等。
3.熟悉(中级)级别定时器中断控制IO高低电平输出:
定时器中断配置 ——> 启动定时器 ——> 响应中断,控制IO高低电平···
4.熟练(中级+)级别
定时器PWM硬件控制输出:
配置PWM对应的IO,以及定时器PWM输出 ——> 启动PWM自动输出···
比较:
上面几种PWM输出方式,前面三种都会CPU干预PWM的输出,也就是会占用CPU资源,特别是前面两种方式,不仅占用CPU,误差还比较大。使用第三种中断方式,如果频率比较高,CPU消耗的也比较严重。这种情况适合于没有硬件PWM输出的单片机。
第四种就是单片机自带硬件PWM输出功能,只需要简单配置就可以自动输出PWM波形,无需CPU干预。


2. PWM实现原理
显然,我们就学PWM控制转速,先来了解一下PWM原理知识:
提问:pwm用timx实现的原理?
PWM(Pulse Width Modulation)是一种常用的模拟信号生成技术,可以通过改变信号的占空比来控制输出信号的电平。在STM32中,可以使用TIM(定时器)模块来实现PWM信号的生成。
具体实现原理如下:
配置TIMx的时钟源和分频系数,使其产生一个固定的计数频率。
配置TIMx的计数模式,使其以向上计数模式计数。
配置TIMx的自动重载寄存器ARR,使其等于计数器的最大值,即计数器溢出时自动重置。
配置TIMx的比较寄存器CCR,使其等于占空比所对应的计数值。
配置TIMx的输出比较模式,使其在计数器计数到CCR时输出高电平,在计数器溢出时输出低电平。
启动TIMx计数器,即可生成PWM信号。
需要注意的是,TIMx的时钟源和分频系数、ARR和CCR的值的设置需要根据具体的应用场景进行调整,以满足不同的需求。
补充:
TIMx的时钟源(可以查看“STM32F0xxx参考手册(中文).pdf”)
TIMx的自动重载寄存器ARR是一个16位的寄存器,用于存储TIMx计数器的自动重载值。当TIMx计数器计数达到ARR的值时,计数器会自动重置为0,并产生一个更新事件。这个寄存器的值可以通过编程的方式进行设置,以控制TIMx的计数范围和计数周期。在计数器向上计数模式下,ARR的值决定了计数器从0开始计数到最大值的范围;在计数器向下计数模式下,ARR的值决定了计数器从最大值开始计数到0的范围。需要注意的是,ARR的值不能超过TIMx计数器的最大值,否则会导致计数器溢出。
TIMx的比较寄存器CCR(Capture/Compare Register)在PWM信号输出中的作用是设置PWM波形的占空比。占空比是指PWM信号中高电平所占的时间比例,通常用百分比表示。CCR寄存器的值决定了PWM波形的占空比,具体计算公式为:
占空比 = (CCR值 / ARR值)* 100%
其中,ARR是自动重载寄存器的值,决定了PWM波形的周期。CCR的值可以通过软件编程或者硬件捕获来设置,从而实现不同的占空比。通过改变CCR的值,可以改变PWM信号的占空比,从而控制输出的电平。
PWM的一个周期
定时器从0开始向上计数 当0-t1段,定时器计数器TIMx_CNT值小于CCRx值,输出低电平 t1-t2段,定时器计数器TIMx_CNT值大于CCRx值,输出高电平 当TIMx_CNT值达到ARR时,定时器溢出,重新向上计数...循环此过程 至此一个PWM周期完成每个定时器有四个通道,每一个通道都有一个捕获比较寄存器,
将寄存器值和计数器值比较,通过比较结果输出高低电平,便可以实现脉冲宽度调制模式(PWM信号)
TIMx_ARR寄存器确定PWM频率,周期是频率倒数,也可以说TIMx_ARR寄存器确定PWM信号周期
TIMx_CCRx寄存器确定占空比
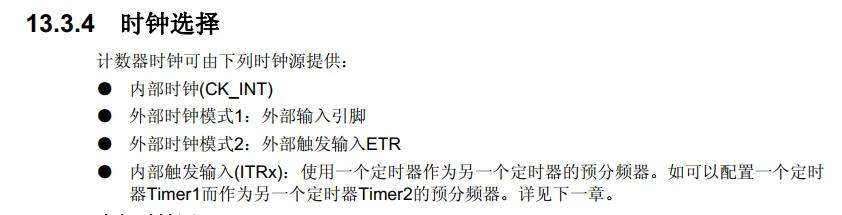
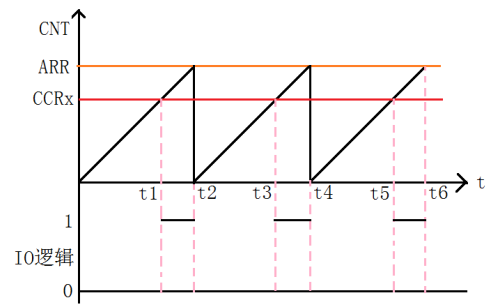
因此想要得到PWM输出信号,只要一个TIMx的一个通道进行一些配置即可实现。简单来说,需要我们确定三个参数,第一个是用于计数的时钟源,随着时钟源波形信号的不断输出,TIMx_ARR寄存器的值不断增加(或减少,减少时为向下计数);第二个参数是TIMx_ARR寄存器的最大值,此参数控制着输出的PWM信号的频率;第三个参数是TIMx_CCRx寄存器的值,这个值就像一条分割线,高于此值时PWM信号输出高电平,低于此值的时候PWM输出低电平,以此来控制PWM信号的占空比。通过这三个参数,可以确定PWM信号的频率(周期也定了)、占空比。
3. PWM信号在STM32CubeMx中的配置
本小节我们讲解时以TIM1的Channel4这个PA11为例。当使用PWM信号控制小车调速时需要再加上一个PWM信号,在“6. 通过PWM信号实现小车调速”小节给出配置的页面。
选择TIM1的时钟源为“Internal Clock”,选择TIM1的Channel4为“PWM Generation CH4”,(TIM1的Channel4是引脚PA11的复用功能,对他操作就是对PA11操作)如下图:
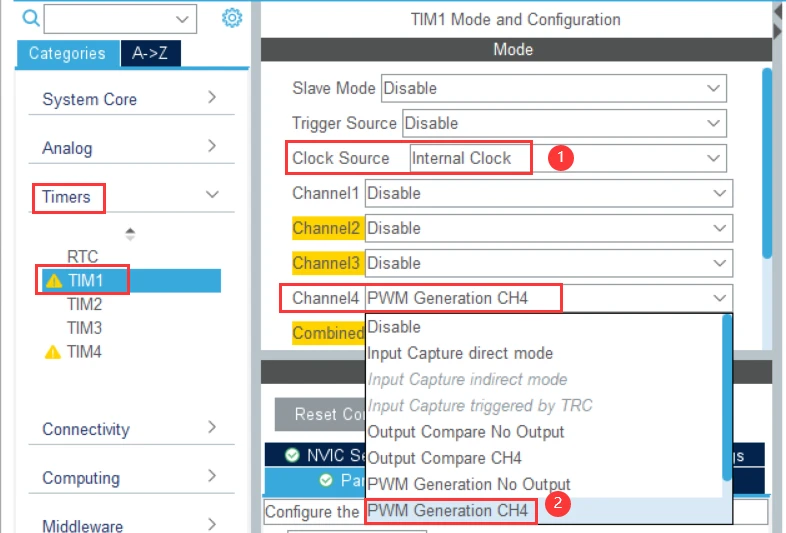
配置好PWM输出引脚后和时钟源后,还要设置STM32CubeMx中的三个参数来控制PWM信号的频率和占空比
在Parameter Settings中设置好Prescaler(预分频系数)、Counter Period(重装载值)、Pulse(脉冲时长)
PWM信号产生中的Prescaler(预分频系数)是指将输入时钟分频的系数,用于控制PWM信号的频率,分频的意思就是将时钟源的频率等分为多少份。
Counter Period(重装载值)是指计数器的最大值,当计数器计数达到该值时,计数器会自动清零并产生一个PWM周期,对应着上面讲到的TIMx_ARR寄存器的最大值。
Pulse(脉冲时长)是指PWM信号的高电平时间,也就是占空比的一部分,对应着上面讲到的的TIMx_CCRx寄存器的值。通过调整Prescaler、Counter Period和Pulse等参数,可以实现不同频率和占空比的PWM信号输出。
疑问解答:
-
什么是分频,为什么要分频?
PWM信号产生中的分频是指将系统时钟或者其他高频信号分频后得到一个低频信号,用于控制PWM信号的频率。在PWM信号产生中,通常需要将高频信号分频后得到一个低频信号,然后再将低频信号与占空比控制信号进行比较,从而产生PWM信号。分频的大小决定了PWM信号的频率,一般情况下,分频系数越大,PWM信号的频率越低。
PWM信号产生中的分频是指将输入的时钟信号分频后再用于PWM信号的产生。分频的目的是为了降低PWM信号的频率,以适应不同的应用场景。对于一些应用场景,需要较低的PWM频率,比如电机控制、LED调光等,而一些应用场景需要较高的PWM频率,比如DC-DC变换器、无线充电等。因此,通过分频可以将输入的时钟信号降低频率,以适应不同的应用场景。
-
电机控制为什么要较低的PWM频率?
在电机控制中,较低的PWM频率可以减少电机的噪声和振动,同时也可以降低电机的损耗和温升。此外,较低的PWM频率还可以提高电机控制的精度和稳定性,使得电机的转速和转矩更加准确和可控。因此,较低的PWM频率在电机控制中是非常重要的。
STM32CubeMx中可以这样设置:psc=1440-1,arr=100-1,Pulse=50,这样设置的效果是PWM信号的频率为500Hz,周期为2ms。
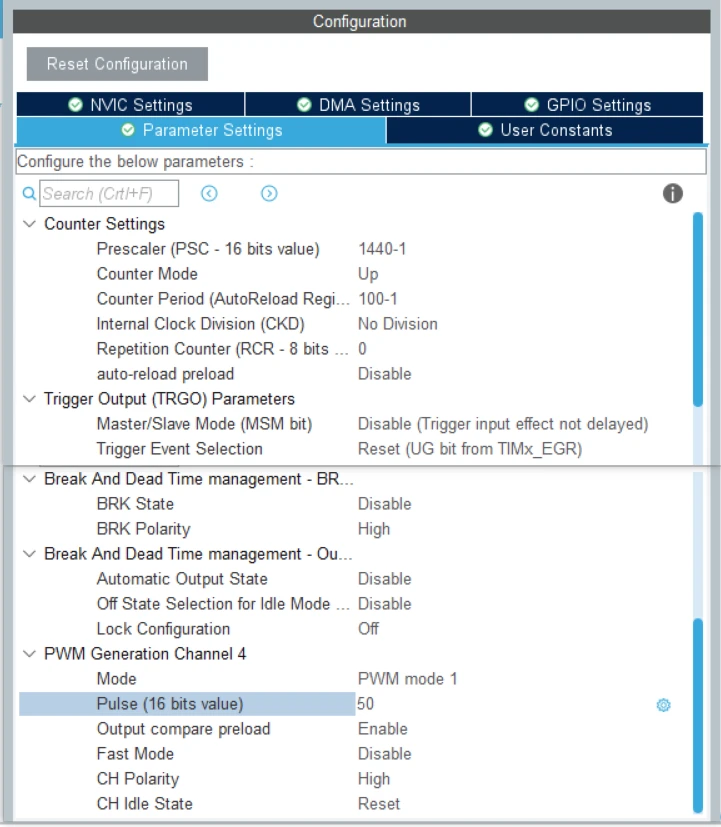
上面的设置参考这个视频:5-PWM输出和MDK如何仿真_哔哩哔哩_bilibili
4. 从公式的角度来理解PWM
符号说明:
| 符号 | 含义 |
|---|---|
| Tout | PWM周期。定时器溢出时间(单位为s) |
| Fpwm | PWM频率。PWM周期的倒数(单位为Hz) |
| Tclk | Tclk是定时器时钟源的时钟频率(单位为Hz)(未被分频的原始时钟频率) |
| arr | 全拼:Counter Period (AutoReload Register),(重装载值)是指计数器的最大值,TIMx_ARR寄存器的最大值 |
| psc | 全拼:Prescaler,预分频系数 |
| Tclk | Tclk是定时器时钟源的时钟频率(单位为Hz)(未被分频的原始时钟频率) |
有的人喜欢将PSC设置为主频-1(例如主频为72MHz),这样分频后频率为1MHz,一个周期刚好是1us,然后将ARR设置为1000-1 , 这样每个周期就是1ms,频率也就为1KHz。而Pulse设置为占空比,设置为500,刚好为1000的一半,则占空比为50%。(这句话相信看了下面的公式会很好理解)
计算公式:
PWM周期:Tout = ( (arr+1) * (psc+1) ) / Tclk (单位:s)
PWM频率:Fpwm = 1 / Tout = Tclk / ( (arr+1) * (psc+1) ) (单位:Hz)
比如 时钟源频率Tclk = 72Mhz ,arr=99 ,psc=1439 ,那么PWM频率就是72000000/100/1440= 500Hz,即Fpwm = 500Hz,Tout = 1 / 500 = 2ms。
占空比:
PWM信号的占空比是指在一个周期内,高电平所占的时间与周期时间的比值。通常用百分比表示,例如50%的占空比表示高电平持续时间占周期时间的50%。
| 模式 | 描述 |
|---|---|
| PWM模式1 | 向上计数:CNT<CCR时,REF置有效电平,CNT≥CCR时,REF置无效电平 向下计数:CNT>CCR时,REF置无效电平,CNT≤CCR时,REF置有效电平 |
| PWM模式2 | 向上计数:CNT<CCR时,REF置无效电平,CNT≥CCR时,REF置有效电平 向下计数:CNT>CCR时,REF置有效电平,CNT≤CCR时,REF置无效电平 |
在STM32CubeMx中的参数说明:
Counter Mode 这个参数影响CNT的计数方式。
PWM Mode 这个参数影响比较CNT和Pulse的比较方式。mode=1时,当CNT < Pulse时,比较结果为1、反之为0,mode=2时差不多就是比较结果反一反;
CH Polarity 这个参数影响信号输出电平。设置为High时,当比较结果为1时输出高电平,结果为0时输出低电平;设置为Low时则输出电平反一反;
| Counter Mode | PWM Mode | CH Polarity |
|---|---|---|
| [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-m2i7fuGi-1688999688888)(https://article.biliimg.com/bfs/article/233eafbd4383ad1a3b65c00a285e534c9184204b.png)] | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-jjsHzy4M-1688999688888)(https://article.biliimg.com/bfs/article/2c6fe2a1ba91928b0c97bb934a71de9d9b434a4c.png)] | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-0izZJ35Z-1688999688889)(https://article.biliimg.com/bfs/article/26e21d63a8ce958ec6515a4784f0976adf9678e9.png)] |
表中图片均为默认设置。CH Polarity一般保持默认为High,无需改动。若在STM32CubeMx中不对“Counter Mode”、“PWM Mode”、“CH Polarity”三个参数进行改动,占空比计算公式默认为:占空比 = CCR / (ARR+1) (单位:%)
占空比计算公式:
-
占空比 = CCR / (ARR+1) (单位:%)(推荐使用)
Counter Mode为向上计数(计数值不断增大),PWM Mode为PWM mode 1,CNT<CCR时,REF置有效电平,CNT≥CCR时,REF置无效电平。如下图:
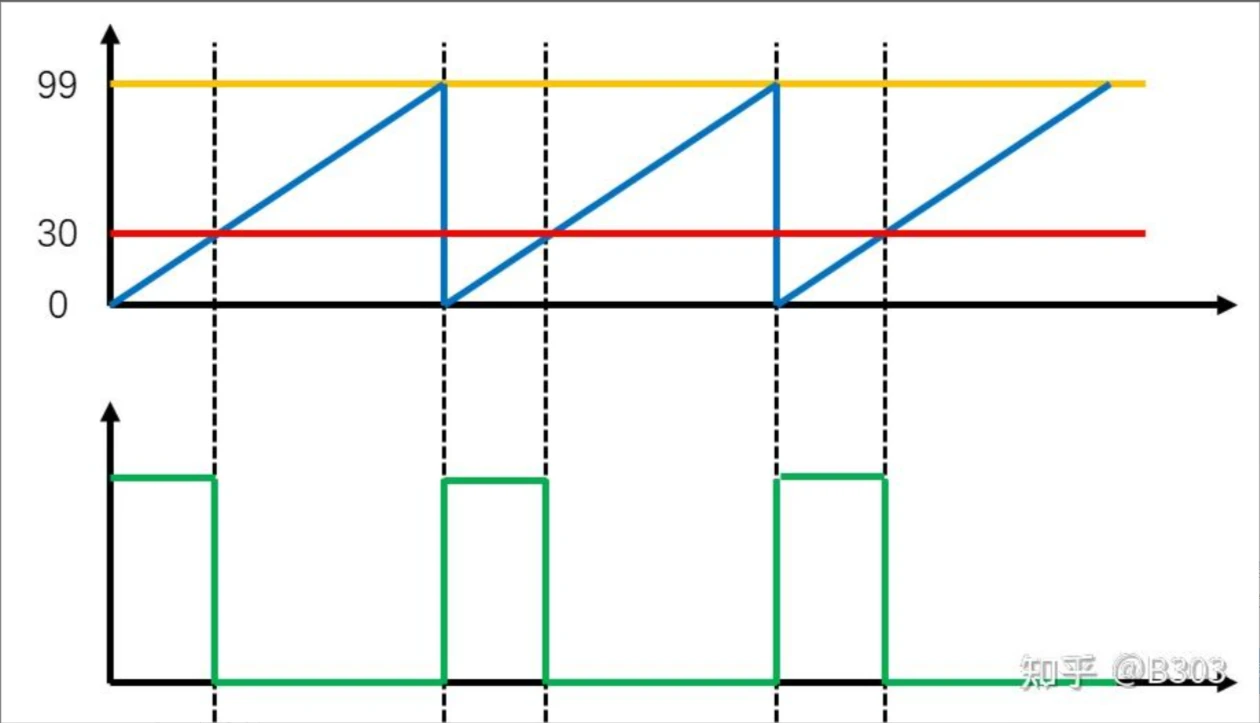
例如:ARR=499,CCR=100 则pwm的占空比为20% 。
-
占空比 = ((ARR+1) - CCR) / (ARR+1) (单位:%)
Counter Mode为向上计数(计数值不断增大),PWM Mode为PWM mode 2,CNT<CCR时,REF置无效电平,CNT≥CCR时,REF置有效电平。如下图:
例如:ARR=499,CCR=100 则pwm的占空比为80% 。
改CCR可以修改占空比,修改ARR可以修改频率。
补充:
TIM1和TIM2的“Clock Source”有两种选择,“Internal Clock”和“ETR2”,如下图
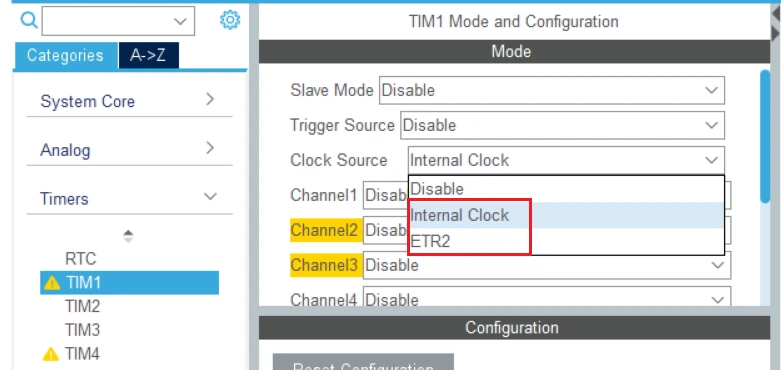
TIM3和TIM4的时钟源只有一种选择:“Internal Clock”,如下图
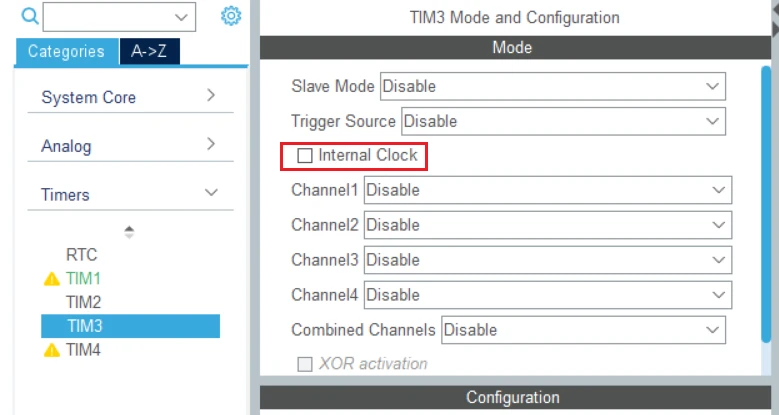
13.3.4 时钟选择
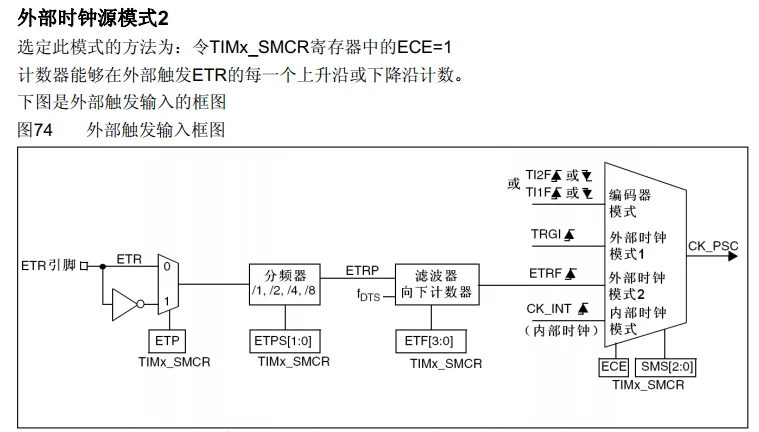
(123条消息) STM32的ETR引脚计数功能_DingUXiu的博客-CSDN博客
5. 通过PWM信号实现呼吸灯小实验
经过前面“3. PWM信号在STM32CubeMx中的配置”的讲解,跟着配置TIM1的Channel4即PA11,那节里所作的操作就是:
选择TIM1的时钟源为“Internal Clock”,
选择TIM1的Channel4为“PWM Generation CH4”,
Prescaler、Counter Period和Pulse等参数设置为:psc=1440-1,arr=100-1,Pulse=50。
这样PA11就会输出率为500Hz,周期为2ms的PWM信号。我们据通过这个PWM信号来完成呼吸灯的小实验。
在STM32CubeMx中配置好后,点击生成代码。
在完成以上设置之后,我们需要使能 TIM1 并且使能 TIM1_CH4输出。在 HAL 库中,函数 HAL_TIM_PWM_Start 可以用来实现这两个功能,函数声明如下:
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_4); //开启定时器1的通道4的PWM输出
/* USER CODE END 2 */
这个函数放在TIM1初始化函数之后就行,如下图:
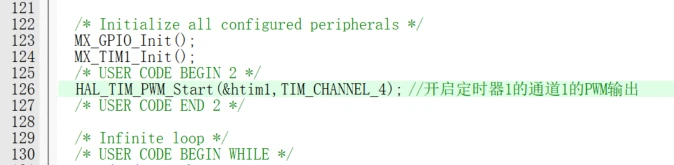
main.c中代码编写:
/* USER CODE BEGIN WHILE */
static int a=0;
while(1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);//板载绿色LED小灯引脚电平反转
HAL_Delay(100);
while(a<99){
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,a++);//设置占空比
HAL_Delay(10);
}
while(a){
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,a--);//设置占空比
HAL_Delay(10);
}
}
认识使用__HAL_TIM_SET_COMPARE()函数
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,a++);//设置占空比
代码里的这个函数的功能是设置CCR的值,以此来改变PWM信号占空比。我们在STM32CubeMx中设置使用默认的占空比计算公式:占空比 = CCR / (ARR+1) (单位:%),所以CCR的值越大,占空比越大,CCR最小为0,最大为ARR+1 。经过我的实验,发现当CCR大于ARR+1时,无论大多少,从电机转动的效果来看,都是100%的占空比输出。
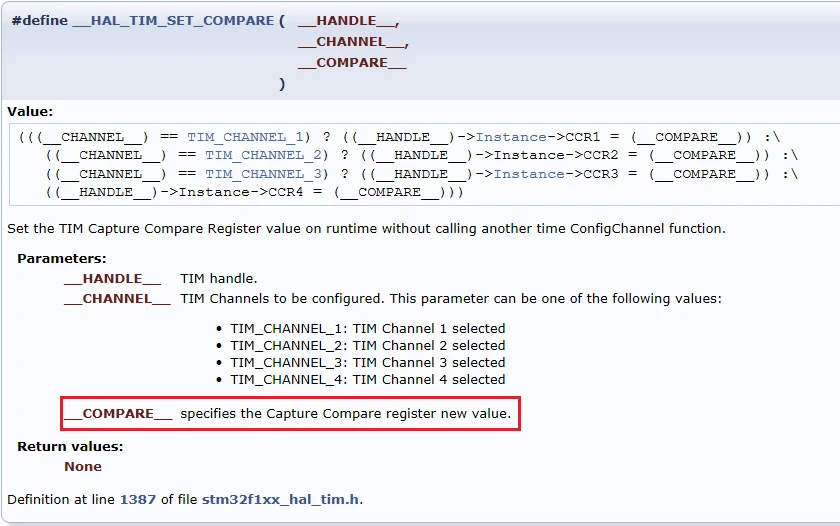
代码编写完成之后,点击编译,烧录,然后连接实物,将PA11接到LED小灯的正极,LED的负极接STM32F103C8T6的GND,最后就能看到渐亮渐灭的呼吸灯了。
6. keil中软件仿真查看PWM波形是输出
1. 首先设置好仿真环境
之前硬件调试时在“Debug”一栏的设置我们做一个备份,
| Dialog DLL | Parameter |
|---|---|
| DCM.DLL | -pCM3 |
如下图:
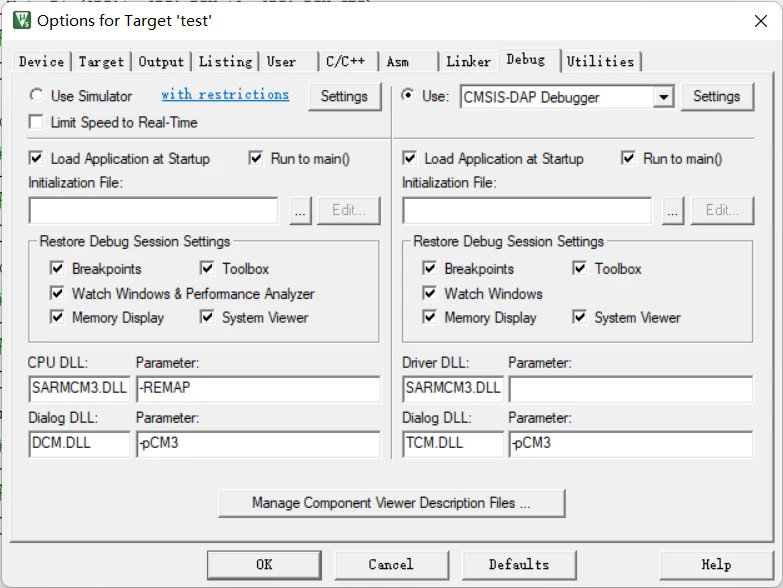
现在配置软件仿真的环境,参数设置如下:
| Dialog DLL | Parameter |
|---|---|
| DARMSTM.DLL | -pSTM32F103C8 |
软件中配置如下图所示:
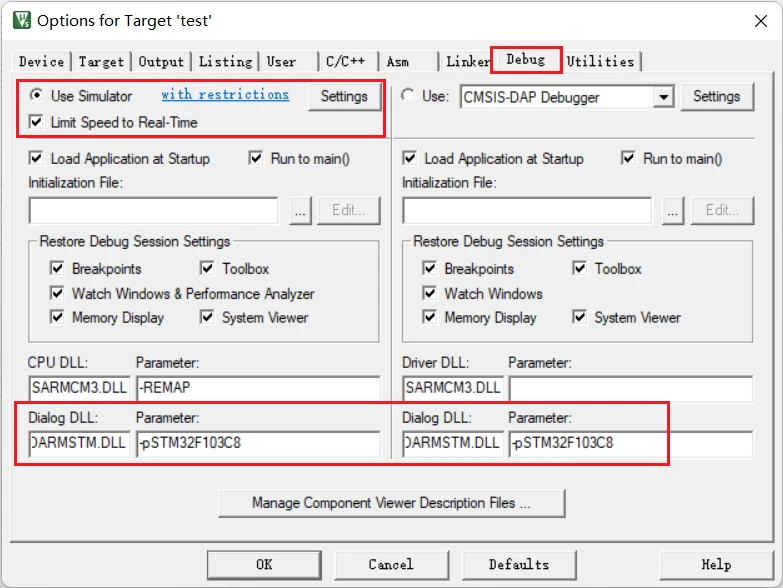
2. 点击debug按钮,进入debug后按run或者F5
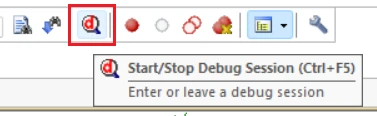
再点击一下会回到代码编写的窗口。
3. VIEW->Analysis Windows->Logica Analyzer打开逻辑分析仪
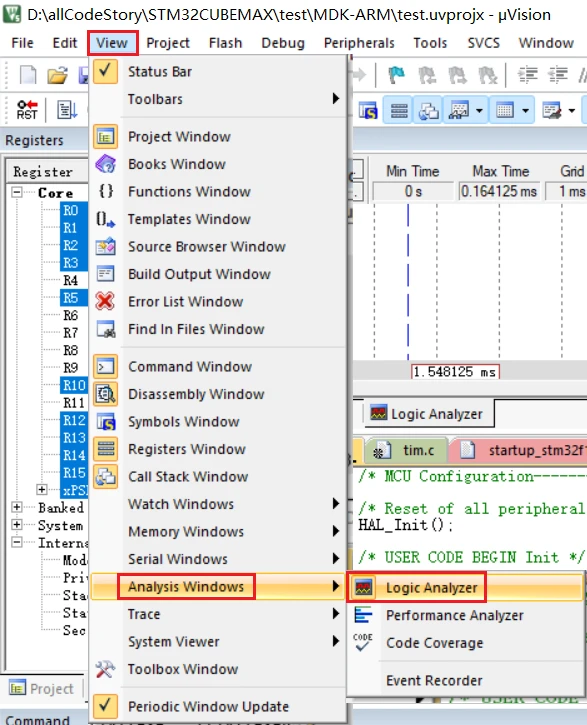
4. 添加要观察的PWM信号变量
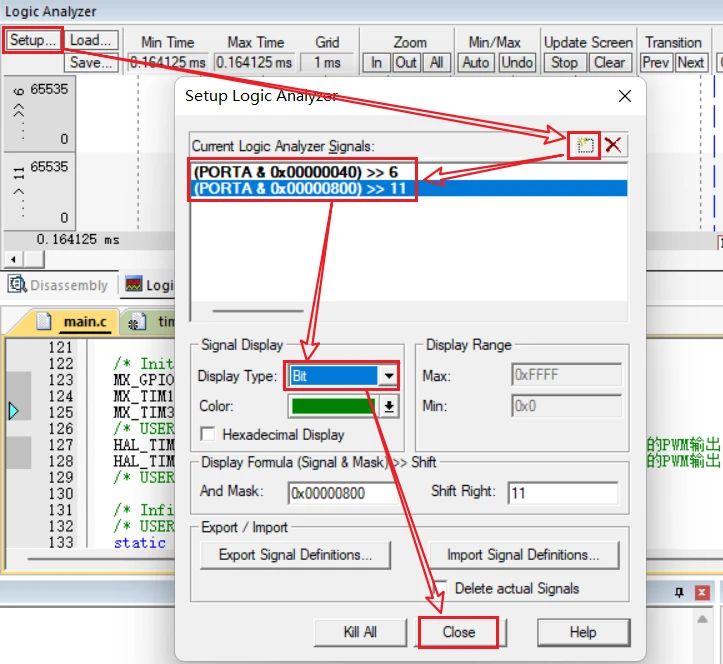
我们在代码中设置的两个PWM信号为PA6和PA11,在新建变量时输入“PORTA.6”后点击回车和输入“PORTA.11”后点击回车.如下图:
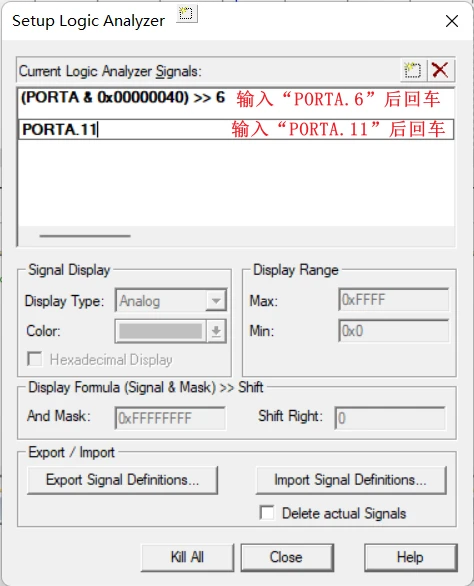
5. 点击全速运行,观察示波器
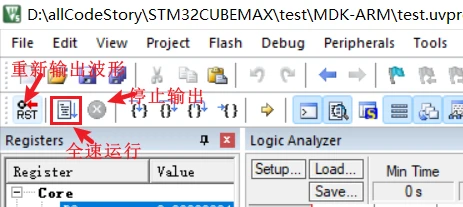
波形输出:

我们在软件中设置的PA6和PA11的占空比一开始都是50%,然后通过While()循环,不断对占空比从0开始增大,到达最大值后再一点点减小,因此,我们在波形输出中可以看到一开始的波形的占空比为50%,接着占空比从0开始不断增大,然后不断减小,再不断增大,再。。。重复此过程。
7. 通过PWM信号实现小车调速
关于小车调速的PWM信号的频率设为多少让人犯难,网上众说纷纭,有的说要“大于1KHz,才能稳定地控制电机”,有的说“一般是10~20khz,如果电机电气时间常数小于0.1ms,要考虑用更高的频率”,有的说“据说在1khz之内就好,否则芯片会发热”,有的说[“频率越高驱动就越耗电,自然器件也就越热,频率高对主滤波储能电容的高频性能要求也越高,所以我觉得15K~25K就好”](用pwm控制直流电机速度,多大频率合适 (amobbs.com 阿莫电子论坛 - 东莞阿莫电子网站)),所以我打算自己实验一下,看看那种频率合适。
测试数据(占空比:50%):
| psc,arr,Pulse设置 | PWM频率(kHz) | 效果 | 点击是否正常启动 |
|---|---|---|---|
| psc=1440-1,arr=100-1,Pulse=50 | 0.5 | 良好 | 是 |
| psc=72-1,arr=2000-1,Pulse=1000 | 0.5 | 良好 | 是 |
| psc=72-1,arr=1000-1,Pulse=500 | 1 | 良好 | 是 |
| psc=72-1,arr=666-1,Pulse=333 | 1.5 | 良好 | 是 |
| psc=72-1,arr=500-1,Pulse=250 | 2 | 良好 | 是 |
| psc=72-1,arr=200-1,Pulse=100 | 5 | 不适合 | 否 |
| psc=72-1,arr=100-1,Pulse=50 | 10 | 不适合 | 否 |
| psc=72-1,arr=66-1,Pulse=33 | 15 | 不适合 | 否 |
| psc=72-1,arr=50-1,Pulse=25 | 20 | 不适合 | 否 |
说明:Pulse就是CCR,Tclk是72MHz,测试时占空比都为50%,Fpwm =Tclk / ( (arr+1) * (psc+1) ) ,改CCR可以修改占空比,修改ARR可以修改频率
效果动图如下所示:

经过上表的测试,控制电机的PWM信号频率可以控制在2kHz以内为好。后来又测试了10%占空比的数据,此时电机都无法正常转动,原因可能和电机有关,电机的设计存在缺陷,转动时需要克服不小的摩擦力后才开始转动,所以在占空比为10%时,电机原理上本应该转动的却没有转动。
测试数据(占空比:10%):
| psc,arr,Pulse设置 | PWM频率(kHz) | 效果 | 点击是否正常启动 |
|---|---|---|---|
| psc=1440-1,arr=100-1,Pulse=10 | 0.5 | 否 | |
| psc=72-1,arr=2000-1,Pulse=200 | 0.5 | 否 | |
| psc=72-1,arr=1000-1,Pulse=100 | 1 | 否 | |
| psc=72-1,arr=666-1,Pulse=66 | 1.5 | 不适合 | 否 |
| psc=72-1,arr=500-1,Pulse=50 | 2 | 不适合 | 否 |
占空比为50%时,Fpwm=0.5、1、1.5、2时效果相差不大,都可以使用,我在代码中以psc=1440-1,arr=100-1,Pulse=50,Fpwm=0.5为例进行设计。
控制小车左右两侧的电机转动需要两个PWM信号,所以除PA11之外,我们再增加一个引脚:PA6(TIM3_CH1)
在STM32CubeMx中配置PA6:
| [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-uKny7e6o-1688999688889)(https://article.biliimg.com/bfs/article/675b1046743e82e63a008534513ff0a1888c3cb0.png)] | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-epYg6HE6-1688999688890)(https://article.biliimg.com/bfs/article/12914ea0bba6a8c4611df90ae1ef02a4579651bd.png)] |
|---|
之后生成代码,在完成以上设置之后,我们需要在keil中使能 TIM1_CH4输出和TIM3_CH1输出。在 HAL 库中,函数 HAL_TIM_PWM_Start 可以用来实现这两个功能,函数声明如下:
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_4); //开启定时器1的通道4的PWM输出
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1); //开启定时器3的通道1的PWM输出
/* USER CODE END 2 */
这个函数放在TIM1初始化函数之后就行,如下图:
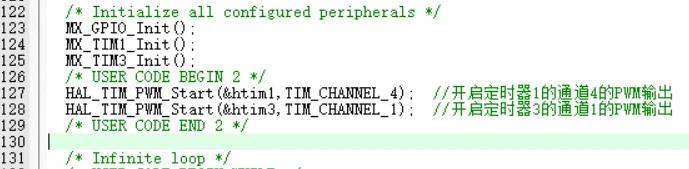
main.c中代码编写:
/* USER CODE BEGIN WHILE */
static int a=0;
//小车前进初始化
Forward();
while(1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);//板载绿色LED小灯引脚电平反转
HAL_Delay(100);
while(a<99){
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,a++);//设置占空比
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,a++);//设置占空比
HAL_Delay(10);
}
while(a){
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,a--);//设置占空比
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,a--);//设置占空比
HAL_Delay(10);
}
}
之后编译,烧录。L298N接线如下图所示:
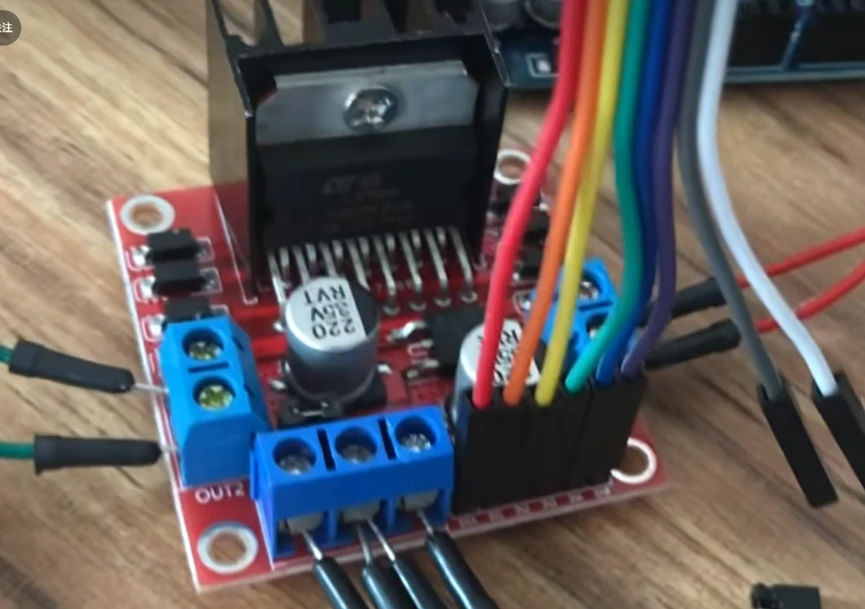
连接实物,通电运行。实物运转效果如下所示:
至此第五阶段的内容告一段落,准备下一阶段的学习。
第六阶段 变身蓝牙遥控小车
截至上一阶段,我们的项目已经可以正常全方位运动了,这一阶段主要讲如何给小车加上蓝牙模块,变身为蓝牙遥控小车,主要是HC-05蓝牙模块的学习。
1. 手机与电脑通过HC-05通信
在“一.3.6). HC-05 蓝牙模块”那里学习HC-05蓝牙模块的使用,跟着该模块“(1). 进入AT模式设置波特率”的内容修改HC-05蓝牙模块的波特率。
设置完通信的比特率为115200后,断开连接,重新上电,再次上电时不用长按按钮,不过使用pwlink连接时,每次都要配置pwlink的VDD引脚为5v。再次上电后,HC-05小灯一直快闪。
电脑端操作:
打开电脑端串口调试助手,进行连接。在电脑端串口调试助手中需要做如下设置:选择串口号、修改波特率为115200、停止位为1、数据位为8、校验位为None,然后点击“打开串口”,
手机端操作:
手机那头也打开蓝牙调试器“xnj.lazydog.btcontroller.apk”(在**资料链接**里下载),连接HC-05,之后就可以通信了。
关于蓝牙调试器“xnj.lazydog.btcontroller.apk”的更多操作请阅读:提高开发效率-蓝牙调试器 - 简书 (jianshu.com)
在手机端的APP的底部栏选项“设备连接”里连接HC-05,在“对话模式”里发送“t”,此时在电脑端的串口调试助手里可以看到手机发送的数据“t”。在电脑端的串口调试助手里填写字母“a”然后发送,此时在手机端也能收到电脑发送的信息。如此,完成了手机与电脑通过HC-05通信的小实验。数据发送如下图所示:

2. 手机与STM32F103C8T6通过HC-05通信并控制小车运动
1). 原理说明
stm32f103c8t6接收HC-05的数据可以通过USART串口通信实现。下面是基于STM32F103C8T6的USART接收HC-05数据的步骤:
- 配置USART串口通信
首先需要配置USART串口通信,包括波特率、数据位、停止位、奇偶校验位等参数。可以使用STM32CubeMX工具进行配置,也可以手动编写代码进行配置。
- 使能USART接收中断
在USART初始化的代码中,需要使能USART接收中断。可以使用HAL库提供的函数
HAL_UART_Receive_IT()来实现。
- 实现USART接收中断处理函数
当USART接收到数据时,会触发USART接收中断。此时需要在中断处理函数中读取接收到的数据。可以使用HAL库提供的函数
HAL_UART_Receive_IT()来实现。以下是一个简单的示例代码:
#include "stm32f1xx_hal.h" UART_HandleTypeDef huart1; void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { if (huart == &huart1) { // 读取接收到的数据 uint8_t data = huart1.Instance->DR; // 处理接收到的数据 // ... // 继续使能USART接收中断 HAL_UART_Receive_IT(&huart1, &data, 1); } } int main(void) { // 初始化USART串口通信 // ... // 使能USART接收中断 HAL_UART_Receive_IT(&huart1, &data, 1); while (1) { // 主循环 // ... } }在上面的代码中,
HAL_UART_RxCpltCallback()函数是USART接收中断处理函数,当USART接收到数据时会自动调用该函数。在该函数中,可以读取接收到的数据并进行处理。最后,需要再次调用HAL_UART_Receive_IT()函数来继续使能USART接收中断。
此外,正点原子的“STM32F103 MINI开发指南V1.3.pdf”这个文件,在“第十七章 串口通信实验”,读者可以自行阅读,弥补一些欠缺的知识。在这里,我摘抄一些易理解且对项目有帮助的知识点,其他的知识能看懂越多越好,不理解影响也不大:
-
数据通信方式
按数据通信方式分类,可分为串行通信和并行通信两种。串行和并行的对比如下图所示:
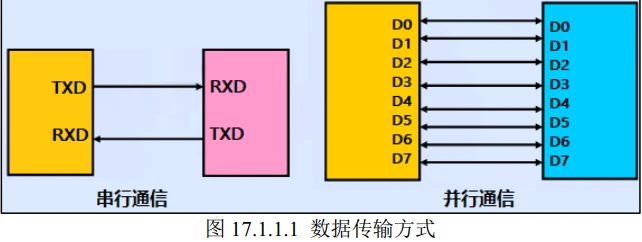
串行通信的基本特征是数据逐位顺序依次传输,优点是传输线少、 布线成本低、 灵活度高等优点,一般用于近距离人机交互, 特殊处理后也可以用于远距离, 缺点就是传输速率低。而并行通信是数据各位可以通过多条线同时传输,优点是传输速率高,缺点就是布线成本高,抗干扰能力差因而适用于短距离、高速率的通信。 -
数据传输方向
根据数据传输方向,通信又可分为全双工、半双工和单工通信。全双工、半双工和单工通信的比较如下图所示: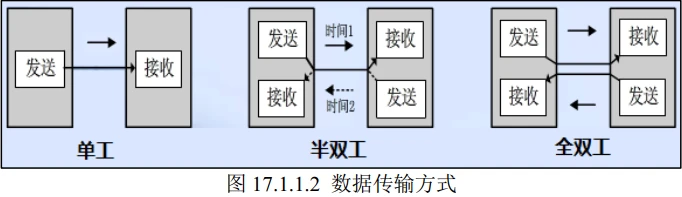
单工是指数据传输仅能沿一个方向,不能实现反方向传输,如校园广播。半双工是指数据传输可以沿着两个方向,但是需要分时进行, 如对讲机。全双工是指数据可以同时进行双向传输,日常的打电话属于这种情形。
这里注意全双工和半双工通信的区别:半双工通信是共用一条线路实现双向通信,而全双工是利用两条线路,一条用于发送数据,另一条用于接收数据。 -
数据同步方式
根据数据同步方式,通信又可分为同步通信和异步通信。同步通信和异步通信比较如下图所示: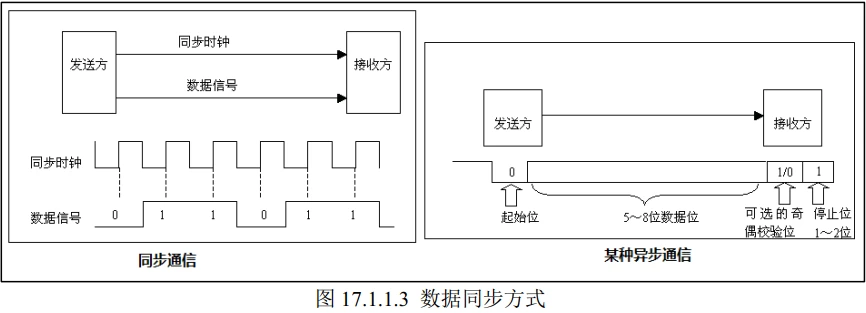
同步通信要求通信双方共用同一时钟信号,在总线上保持统一的时序和周期完成信息传输。
优点:可以实现高速率、大容量的数据传输,以及点对多点传输。
缺点: 要求发送时钟和接收时钟保持严格同步,收发双方时钟允许的误差较小,同时硬件复杂。异步通信不需要时钟信号,而是在数据信号中加入开始位和停止位等一些同步信号,以便使接收端能够正确地将每一个字符接收下来,某些通信中还需要双方约定传输速率。
优点:没有时钟信号硬件简单,双方时钟可允许一定误差。
缺点: 通信速率较低,只适用点对点传输。
2). 在STM32CubeMx中配置串口
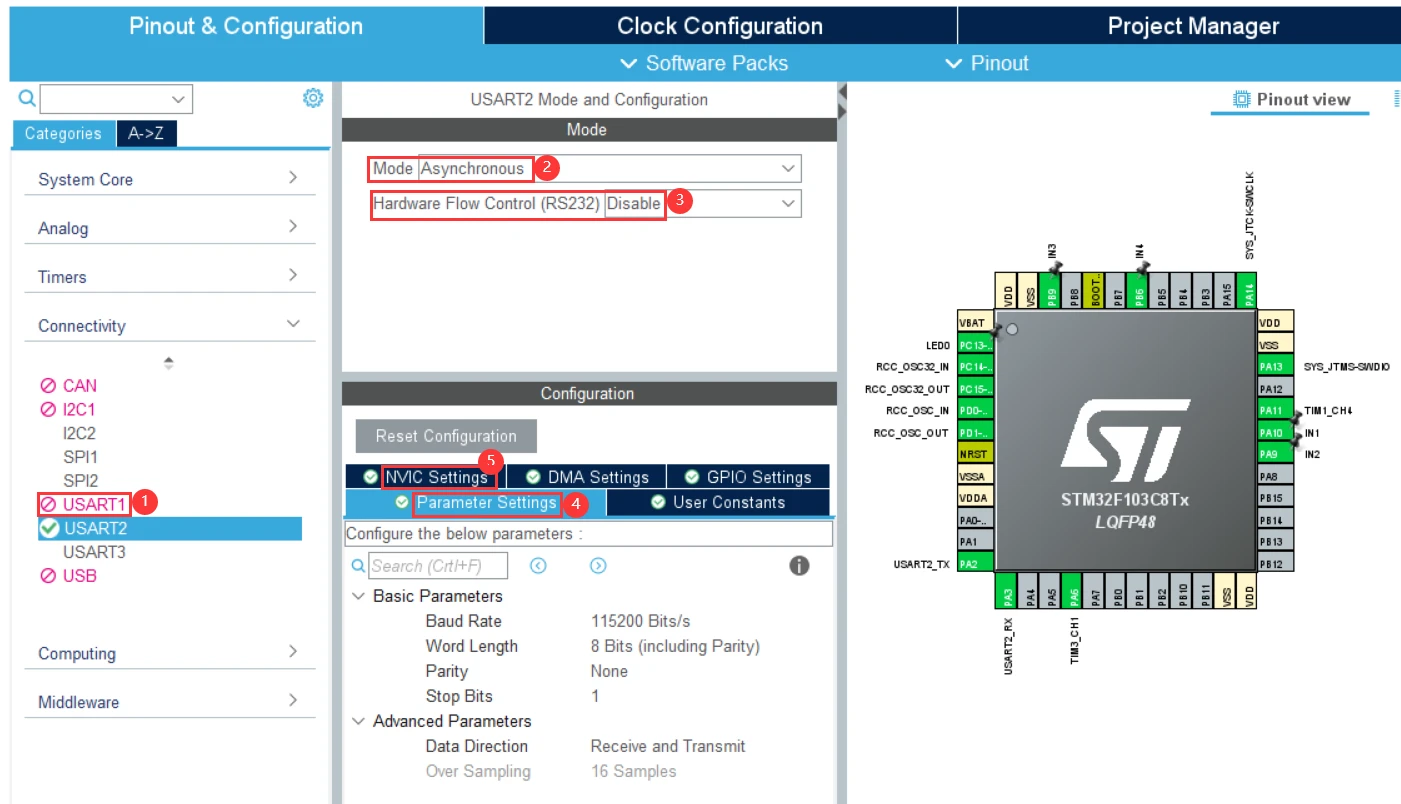
序号1处
串口1(USART1)被标红了,显示为不可使用的状态,原因是USART1的USART1_TX(PA9)、USART1_RX(PA10)被占用了,在之前控制电机转动配置时,PA9作为IN2,PA10作为IN1,控制着左侧电机的转动方向。所以在这里无法使用串口1来与HC-05连接使用。串口2和串口3仍可以使用。
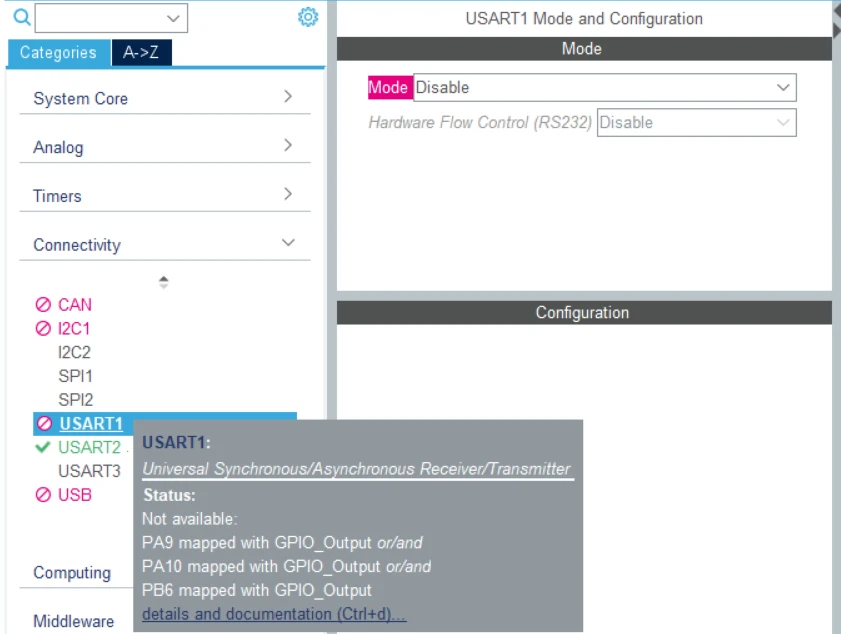
序号2处
此处的配置为数据同步方式的配置,我们选择异步传输方式”Asynchronous“。
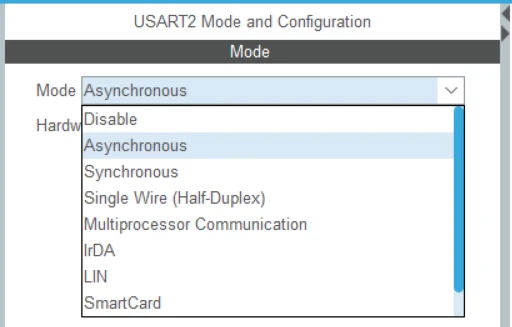
| Mode | 描述 | 硬件引脚 | 支持外设 |
|---|---|---|---|
| Asynchronous | 异步模式 | TXD、RXD | USART、UART |
| Synchronous | 同步模式 | TXD、RXD、CK | USART |
| Single Wire (Half-Duplex) | 半双工单线模式 | TXD | USART、UART |
| Multiprocessor Communication | 多处理器通讯模式 | TXD、RXD | USART、UART |
| IrDA | 红外解码通信 | TXD、RXD | USART、UART |
| LIN | 总线通信 | TXD、RXD | USART、UART |
| SmartCard | 智能卡模式 | TXD | USART、UART |
| SmartCard with Card Clock | 带时钟智能卡模式 | TXD、CK | USART |
其中UART(Universal Asynchronous Receiver/Transmitter)为通用异步收发器
USART:(Universal Synchronous/Asynchronous Receiver/Transmitter)通用同步/异步串行接收/发送器USART是一个全双工通用同步/异步串行收发模块,该接口是一个高度灵活的串行通信设备。
原文链接:https://blog.csdn.net/qq_45699195/article/details/119912517
序号3处
此处的配置为数据同步方式的配置,我们选择”Disable“。
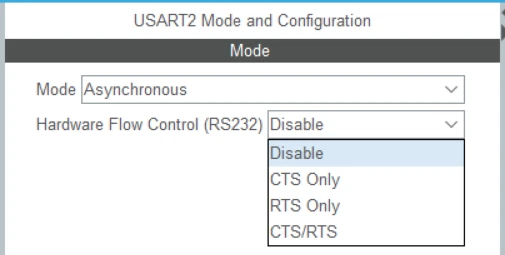
关于硬件流控制的相关知识相信看完下面这两篇文章便会有个大致的了解,读者在此处可以选择使用硬件流控制,让数据传输更可靠。
stm32串口USART 硬件流控 --学习笔记 - 简书 (jianshu.com)
(128条消息) UART串口流控制(Flow control)_uart流控_夏沫の浅雨的博客-CSDN博客
序号4处
此处为串口通信的参数设置,因为之前在“一.3.6).(1). 进入AT模式设置波特率”处讲解过蓝牙模块通信参数设置的原因就是为了与这里的默认设置保持一致,所以此处我们不做改动。
序号5处
一篇介绍NVIC的文章:(128条消息) STM32的NVIC和中断的总结_stm32g0中断分组_wuyuzun的博客-CSDN博客
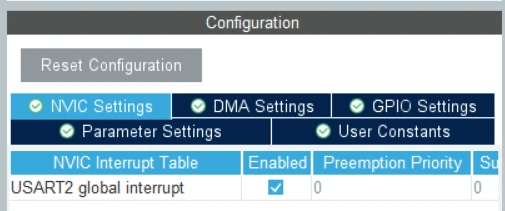
在这里我们需要使能串口2的全局中断,表示此串口采用中断的方式处理收发数据。
因为我们没使用DMA这种数据传输方式,所以”DMA Settings“选项无需设置。
“GPIO Settings”这栏保持默认就行。
至此在STM32CubeMx中配置串口的工作完成,随后点击生成代码,进入到Keil中编写代码。
3). 在Keil中编写代码
先来了解下HAL_UART_Init、HAL_UART_Receive_IT、HAL_UART_IRQHandler、 UART_Receive_IT、HAL_UART_RxCpltCallback
先来看看正点原子关于其中三个函数的说明:(130条消息) HAL_UART_Init、HAL_UART_Receive_IT、HAL_UART_IRQHandler说明_quxuexi的博客-CSDN博客
chatGPT回答:
HAL_UART_Init:用于初始化UART串口通信的相关参数,如波特率、数据位、停止位、校验位等。
HAL_UART_Receive_IT:用于开启UART串口接收中断,并启动接收数据。
HAL_UART_IRQHandler:用于处理UART串口接收中断,当有数据接收到时,会调用该函数进行处理。 -
UART_Receive_IT:是一个宏定义,用于调用HAL_UART_Receive_IT函数。 -
HAL_UART_RxCpltCallback:是一个回调函数,当UART串口接收完成时,会自动调用该函数进行处理。在该函数中,可以对接收到的数据进行处理,比如存储到缓冲区中。
在上一步生成的项目代码中均可以查到上述五个函数的定义,查看方法是:Ctrl+f调出查找窗口并按照图中指示查找即可:
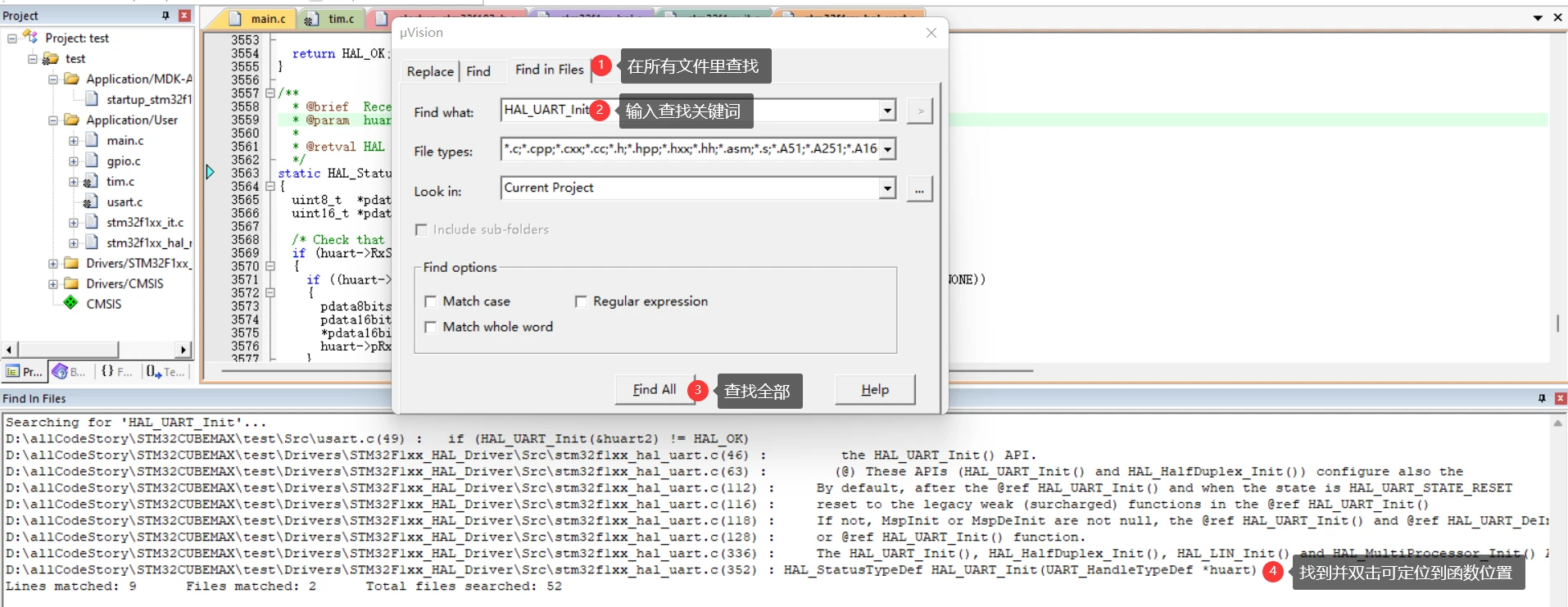
变量
uint8_t\uint_16_t\uint32_t\uint64_t
这些类型的来源:这些数据类型中都带有_t, _t 表示这些数据类型是通过typedef定义的,而不是新的数据类型。也就是说,它们其实是我们已知的类型的别名。
在C99标准中定义了这些数据类型,具体定义在:/usr/include/stdint.h ISO C99: 7.18 Integer types
typedef signed char int8_t; // 范围 -128~127 (1 Byte)
typedef short int int16_t; // 范围 -32768 ~ + 32767 (2 Bytes)
typedef int int32_t; // 范围 -32768 ~ + 32767 (4 Bytes)
typedef long int int64_t; // 范围 -9223372036854775808 ~ +9223372036854775807
typedef unsigned char uint8_t; // 范围0~255 (1 Byte)
typedef unsigned short int uint16_t; // 范围0~65536 (2 Bytes)
typedef unsigned int uint32_t; // 范围0~4294967295 (4 Bytes)
typedef unsigned long int uint64_t; // 范围0~18446744073709551615 (8 Byte)
函数
HAL_UART_Init
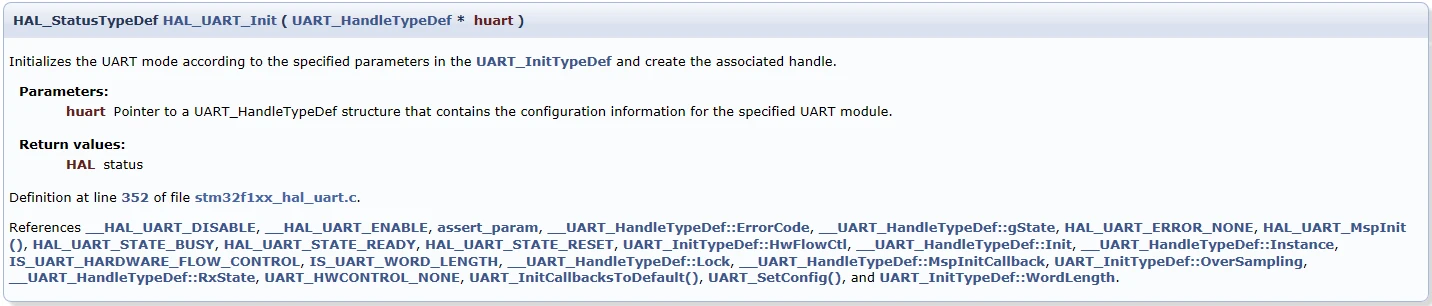
HAL_UART_Receive_IT
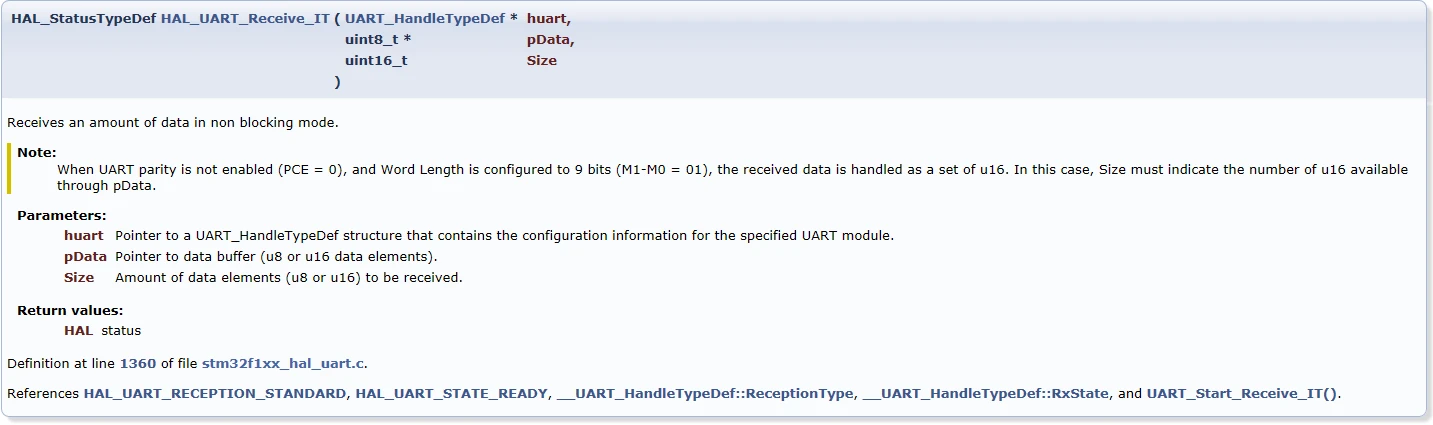
//串口轮询模式发送,使用超时管理机制
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
//串口轮询模式发送,使用超时管理机制
HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
//串口中断模式发送
HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
//串口中断模式接收
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
//串口DMA模式发送
HAL_StatusTypeDef HAL_UART_Transmit_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
//串口DMA模式接收
HAL_StatusTypeDef HAL_UART_Receive_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
/**
* @param huart Pointer to a UART_HandleTypeDef structure that contains
* the configuration information for the specified UART module.
* @param pData Pointer to data buffer (u8 or u16 data elements).
* @param Size Amount of data elements (u8 or u16) to be received.
* @param Timeout Timeout duration
* @retval HAL status
*/
HAL_UART_IRQHandler
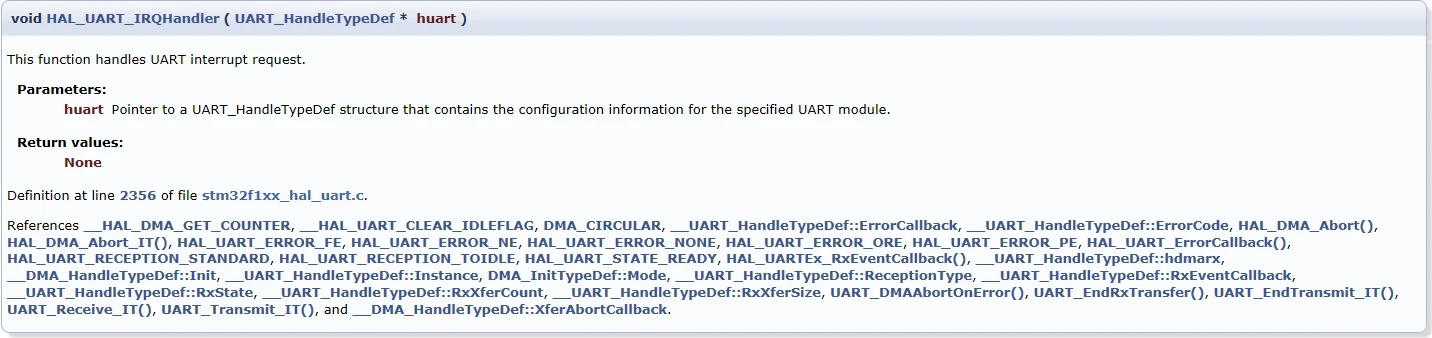
代码main.c中代码编写
先定义一个无符号字符型变量,用于接收串口收到的数据。
在串口中断模式接收函数中HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)第二个参数是uint8_t类型的指针,所以我们需要定义这样一个uint8_t类型的变量usart2ReceiveData来接收数据。
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
uint8_t usart2ReceiveData; //范围0~255
/* USER CODE END PD */
在前面我们为PWM信号设置了一些参数:psc=1440-1,arr=100-1,Pulse=50,在设置PWM信号占空比的函数__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,a)中第三个参数的值(即CRR的值)影响着占空比,CCR的值越大,占空比越大,CCR最小为0,最大为ARR+1 。经过我的实验,发现当CCR大于ARR+1时,无论大多少,从电机转动的效果来看,都是100%的占空比输出。结合PWM信号的参数(psc=1440-1,arr=100-1,Pulse=50),控制PWM信号占空比的CCR的值的范围在0~100之间。
当我们定义的变量usart2ReceiveData值为0~100时,表示收到串口发来的数据为 0~100,这时usart2ReceiveData的值应该表示PWM信号的占空比。当usart2ReceiveData的值大于100时,可以表示其他含义,其对应关系如下表所示:
| usart2ReceiveData的值(十进制) | usart2ReceiveData的值(十六进制) | 含义 |
|---|---|---|
| 0~100 | 00~64 | PWM信号占空比 |
| 101 | 65 | 小车停止 |
| 102 | 66 | 小车前进 |
| 103 | 67 | 小车后退 |
| 104 | 68 | 小车左转 |
| 105 | 69 | 小车右转 |
ASCALL码表对照表
再编写中断回调函数:
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart){
if(huart->Instance == USART2){
if(usart2ReceiveData == 101) Stop_run();//停止
if(usart2ReceiveData == 102) Forward();//前进
if(usart2ReceiveData == 103) Backward();//后退
if(usart2ReceiveData == 104) Leftward();//左转
if(usart2ReceiveData == 105) Rightward();//右转
if(0 <= usart2ReceiveData && usart2ReceiveData <= 100){
__HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_4,usart2ReceiveData);//设置占空比
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,usart2ReceiveData);//设置占空比
}
HAL_UART_Transmit(&huart2,&usart2ReceiveData,1,100);通过蓝牙向外发送数据,主要作为收到数据的反馈。
HAL_UART_Receive_IT(&huart2,&usart2ReceiveData,1);
}
}
/* USER CODE END 0 */
中断处理函数在“…\Drivers\STM32F1xx_HAL_Driver\Src\stm32f1xx_hal_uart.c(2616)”处定义,定义为 : __weak void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart),函数前面有个__weak,weak 顾名思义是“弱”的意思,所以如果函数名称前面加上__weak 修饰符,我们一般称这个函数为“弱函数”。加上了__weak 修饰符的函数,用户可以在用户文件中重新定义一个 同名函数,最终编译器编译的时候,会选择用户定义的函数,如果用户没有重新定义这个函数,那么编译器就会执行__weak 声明的函数,并且编译器不会报错。
我们在main.c的“/* USER CODE END 0 */”这行注释前重写中断处理函数。
再开启串口中断模式接收
/* USER CODE BEGIN 2 */
//串口中断模式接收
HAL_UART_Receive_IT(&huart2,&usart2ReceiveData,1);//HAL_UART_Receive_IT(&huart2, (uint8_t *)rx_buf,1);这是接收1个字节到rx_buf中
/* USER CODE END 2 */
在while循环中不用再加控制小车运动的代码,因为我们将要通过手机蓝牙发送运动指令控制小车运动。while只保留控制板载绿色LED灯闪烁的代码即可:
while(1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);//板载绿色LED小灯引脚电平反转
HAL_Delay(100);
}
至此代码部分编写完成,然后编译,烧录。此阶段的main.c文件全部代码可以见:(133条消息) “三、从零开始,上手操作.第六阶段 变身蓝牙遥控小车. 3). 在Keil中编写代码. 代码main.c中代码编写“处参考main.c文件代码_quxuexi的博客-CSDN博客
4). 实物连接
实物连接示意图如下:
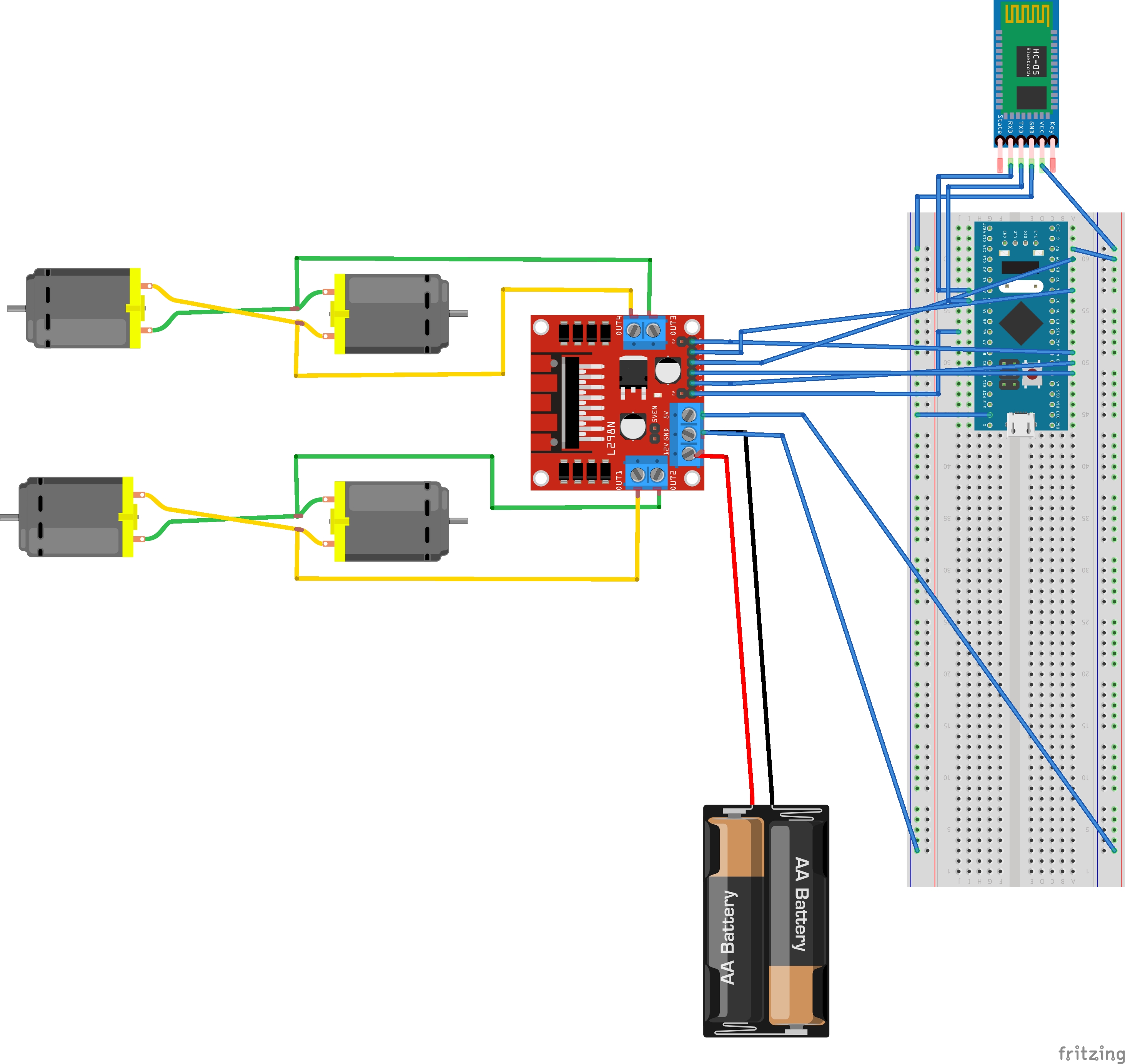
实物连接图如下:

5). 手机端蓝牙调试器的设置
在手机端蓝牙调试器APP中的“按钮控制界面”,如下图:

第二行的“自动巡逻”、“手动”、“避障”是我们之后会设置的功能,目前暂时用不到,可以不用设置这三个按钮。
其他按钮设置如下:(全速也可以设为占空比100%)
| 慢速(占空比:43%) | 中速(占空比:60%) | 全速(占空比:90%) | 前进 |
|---|---|---|---|
| [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-qBi07jlp-1688999688891)(https://article.biliimg.com/bfs/article/20373387bbc891b06c38e639a57977b0431929b1.png)] | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-MXnRGgU3-1688999688891)(https://article.biliimg.com/bfs/article/9e237c74fdddaa268f5ff409dacd2a39c84e16df.png)] | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Wxukqtac-1688999688892)(https://article.biliimg.com/bfs/article/24926d5ae69fd52535cc63cc1aaa84aef8a25231.png)] | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-yem0yXMn-1688999688892)(https://article.biliimg.com/bfs/article/8586b72d67c58318795d35b1b6cbea3bbe8627df.png)] |
| 左转 | 停止 | 右转 | 后退 |
| [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-i1xryuyP-1688999688892)(https://article.biliimg.com/bfs/article/fe0be1a33c4703061eef346f2c036a570fb26b85.png)] | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-DCR3puMR-1688999688893)(https://article.biliimg.com/bfs/article/1812dec88e360847ca29f5f656d728a64e1e78e4.png)] | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-dc7JDA7D-1688999688893)(https://article.biliimg.com/bfs/article/54d48ef213cc3e5c9fa5054688e0bc19c5b6b7bd.png)] | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-tKFjuoHW-1688999688894)(https://article.biliimg.com/bfs/article/8c1d1aac33a53b511fe646e6daf7b62a4b14a250.png)] |
像这样通过按钮控制速度无法做到精确的控制PWM占空比,我们也可以学习自己在APP里新建一个工程,专门来控制小车。
蓝牙调试器中新建工程的方法见:提高开发效率-蓝牙调试器 - 简书 (jianshu.com)
如果不想新建工程,却又想精确地控制PWM占空比,我们也可以在使用的过程中动态地修改其中一个按钮发送的数据,发送0~100之间的数都表示发送的是占空比的值。比如我们修改“慢速”按钮的值,经过实验,我买的零件只有当占空比大于2B(十六进制)时小车电机才能正常转动。如果我们想设置占空比为50%,我们就可以将“慢速”按钮的值改为32(我们输入的值都是16进制,进制之间的转换可以看上面的ASCALL码表对照表)。
至此,我们万事具备,只欠东风。跟着上面的步骤完成了代码编写,编译,烧录,实物连接,手机APP设置等,现在就可以通电,蓝牙连接,手机端点击按钮发送指令控制小车运动。
至此第六阶段“变身蓝牙遥控小车”的内容告一段落,准备下一阶段的学习。
第七阶段 乒乓球识别
上一阶段讲了如何变身蓝牙小车,这一阶段主要讲乒乓球识别模块。
1. K210模块的入手,环境搭建(建议看完再动手)
主要参考这个视频: K210入门_哔哩哔哩_bilibili
跟着这个视频学,先是打开K210文档:https://wiki.sipeed.com/soft/maixpy/zh/index.html
然后下载了MaixPy IDE,我用的芯片是maix dock,查看文档后发现我的CH340驱动还没装:Maix Dock USB 驱动安装 - Sipeed Wiki,然后在文档里点击下载了CH340驱动的安装程序,安装时显示驱动预安装成功,感觉不对劲,就查了查安装方法:(53条消息) win10下如何装CH340驱动_坤小白的博客-CSDN博客
预安装成功是什么?
如果你安装驱动的时候没有接硬件,驱动装上但不会立刻使用,提示你是预安装成功,等你插上硬件的时候,系统会自动安装驱动程序。但如果你插上硬件时再点击安装驱动,仍然是预安装成功,可能就有些问题了。
原来需要插上芯片才能解决驱动的问题,插上后果然自动安装了驱动,拔掉芯片后,驱动仍然存在。

接着去更新固件,照着文档的操作,我下载的固件是最新的那版,

如果此时又有了新的版本,也可以进到最新此时最新的那个目录里去下载固件。
点进去,下载下面这个:

小插曲
可是为什么要下载这个固件呢?之前我下载的是另一个固件,如下图:
这个固件的含义:
突然一天早上看了一篇博客:(55条消息) K210快速上手教程(色块、人脸、声源识别等)_k210教程_Smalld_cat的博客-CSDN博客
复制他的“识别色块并且串口输出最大色块中心坐标”这块代码,运行时报错:
后来查了原因:(55条消息) K210(1)解决一些新上手出现的问题_image’ object has no attribute 'cpu__-ARCHER-_的博客-CSDN博客
知道应该是固件版本不对,这篇博客给了一个建议:MaixPy IDE中的错误-有问必答-CSDN问答
“下载的固件的问题,它官网提供的一些固件是不支持外设和相关算法的,直接用出厂带的固件或者下载“maixpy_vx.y.z_x_xxx*.bin”这个固件就行”。
于是到固件下载的网址:下载站 - Sipeed
下载了这个版本的固件:
果然,问题被解决了,好耶!!!



然后打开固件下载软件(绿色软件,无需安装),选择固件,芯片类型,端口就可以下载了

下载完会提示成功。
下面是maixPy IDE的使用:
“要使用 MaixPy IDE , 固件必须是 v0.3.1 版本以上, 否则MaixPyIDE 上会连接不上, 使用前尽量检查固件版本和 IDE 版本,都更新到最新版以保障能正常使用”
我下载的固件是v0.6.2版本的,符合使用要求:

打开maixPy IDE,默认有一个测试程序,可以打开摄像头

接下来解决识别乒乓球的问题,观看这个教学视频(15:00处)[k210] MaixPy 上手教程_哔哩哔哩_bilibili
讲解了如何设置色块阈值。
设置完白色和黄色球体的阈值后,再运行就可以识别乒乓球了。
2. K210模块代码编写
K210与单片机的连接
记录一下MaixPy IDE上的初始程序:
# Hello World Example
#
# Welcome to the MaixPy IDE!
# 1. Conenct board to computer
# 2. Select board at the top of MaixPy IDE: `tools->Select Board`
# 3. Click the connect buttion below to connect board
# 4. Click on the green run arrow button below to run the script!
import sensor, image, time, lcd
lcd.init(freq=15000000)
sensor.reset() # Reset and initialize the sensor. It will
# run automatically, call sensor.run(0) to stop
sensor.set_pixformat(sensor.RGB565) # Set pixel format to RGB565 (or GRAYSCALE)
sensor.set_framesize(sensor.QVGA) # Set frame size to QVGA (320x240)
sensor.skip_frames(time = 2000) # Wait for settings take effect.
clock = time.clock() # Create a clock object to track the FPS.
while(True):
clock.tick() # Update the FPS clock.
img = sensor.snapshot() # Take a picture and return the image.
lcd.display(img) # Display on LCD
print(clock.fps()) # Note: MaixPy's Cam runs about half as fast when connected
# to the IDE. The FPS should increase once disconnected.
关于k210和maixPY的学习使用主要参考这两个官方中文文档:
首先需要了解我买的板子:M1W Dock,它属于Maix-I,W表示支持wifi功能
板子介绍:Sipeed M1/M1W - Sipeed Wiki,
在这里找到了板子的一些文件资料:下载站 - Sipeed
K210的串口是任意映射的,所以我可以任意选择两个引脚作为输入和输出串口。
| K210(Micro额外供电) | STM32F103C8T6 |
|---|---|
| GND | GND |
| IO10(TXD) | Rx(PB11) |
| IO9(RXD) | Tx(PB10) |
现在编写一下完整的将要保存到k210里的代码;主要实现的功能是:检测两种颜色的乒乓球,然后根据乒乓球在屏幕中的位置向单片机发送左转、右转、前进的命令。
在这里我放出来最后我使用的代码,中间过程及一开始的代码我放在一篇文章里:(134条消息) k210乒乓球识别模块乒乓球识别程序-初版_quxuexi的博客-CSDN博客
import sensor, image, time,lcd,utime
from machine import UART
from fpioa_manager import fm
fm.register(10, fm.fpioa.UART1_TX, force=True)#映射串口引脚
fm.register(9, fm.fpioa.UART1_RX, force=True)#映射串口引脚
uart = UART(UART.UART1, 115200, 8, 0, 0, timeout=1000, read_buf_len=4096)
clock = time.clock()
lcd.init() #显示屏初始化
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QQVGA) #QQVGA: 160x120、QVGA: 320x240、
sensor.run(1)
sensor.skip_frames(20)#跳过刚启动开始的30帧照片
lcd.rotation(2)#LCD屏幕翻转,范围是0~3,上和下反转,左和右反转
sensor.set_hmirror(True)#摄像头镜像
sensor.set_auto_gain(False) # must be turned off for color tracking
#sensor.set_auto_whitebal(False) # must be turned off for color tracking,关闭白平衡
#sensor.set_brightness(3) #-3至+3,亮度越大,图片越亮
#sensor.set_saturation(2)#-3至+3,饱和度越大,色彩越鲜艳
#sensor.set_contrast(2)#-3至+3,对比度越大,颜色之间的反差越大
def find_max(blobs):
max_size=0
for blob in blobs:
if blob[2]*blob[3] > max_size:
max_blob=blob
max_size = blob[2]*blob[3]
return max_blob
#存放不同的颜色阈值,依次为白色、黄色、绿色(白天光的上流:(82, 100, -3, 8, -3, 2))(晚上:(62, 100, -30, 4, -9, 31))
color = ((82, 100, -3, 8, -3, 2),(50, 96, -28, 18, 48, 90))
size_threshold = 4500 #若检测到的小球框的面积小于size_threshold表明小球距离小车太远,小车需要前进。这个参数的大小需要根据实际情况修改
target=()
flag = 0 #用于标记一个while循环中是否检测到小球,falg==1表示本轮发现了小球
count = 0
bug_open = False # True or False
previous_ball_location = 'r'
location_count=0 #用来防止误识别,保持识别结果的稳定性
def stable_output(location):
global location_count,previous_ball_location
if previous_ball_location != location:
location_count = 1
previous_ball_location = location
else:
location_count = location_count + 1
if location_count >=10:
uart.write(location) #通过串口向外发送数据,控制小车向location方向运动
clock.tick()#开始追踪运行时间。
while(True):
sensor.set_auto_whitebal(False) # must be turned off for color tracking,检测黄球时,关闭白平衡,检测白球时开启白平衡
img = sensor.snapshot().histeq(adaptive=True, clip_limit=3)
img.lens_corr(1.8) #镜头畸变矫正(lens correction),lens_corr 为了去除畸变, 1.8 是默认参数,可以根据自己实际情况调整
#专门检测黄色小球
blobs = img.find_blobs([color[1]])
if blobs:
max_blob = find_max(blobs)
x_error = max_blob[5]-img.width()/2#若x_error<0,则说明小球在左边,小车需要左转,若x_error>0,则说明小球在右边,小车需要右转
h_error = max_blob[2]*max_blob[3]-size_threshold#若h_error<0,则小车距离小球还有距离,需要前进。
img.draw_circle(max_blob.x()+int(max_blob.w()/2), max_blob.y()+int(max_blob.w()/2), int(max_blob.w()/2), color = (255, 255, 0),thickness=5)#识别到的白色圆形用白色的圆框出来
#print("blob.density(): ", max_blob.density(),"blob.w(): ", max_blob.w())
#给黄球标注框框
#for b in blobs:
#img.draw_circle(b.x()+int(b.w()/2), b.y()+int(b.w()/2), int(b.w()/2), color = (255, 255, 0),thickness=5)#识别到的白色圆形用白色的圆框出来
if(x_error<-10 and max_blob.density()>0.7 and 70>max_blob.w()>8):#设为-5是留有一定的误差空间,因为不一定小球非要在正中间才能被收集
#stable_output('l')
uart.write('l')
flag = 1 #标记本轮发现过目标
count = 0 #发现目标,count置为0,从头开始计数
lcd.draw_string(10, 10, "Left", lcd.RED, lcd.YELLOW)
if bug_open == True:
print("黄球,串口发送l,","blob.density(): ", max_blob.density(),"blob.w(): ", max_blob.w())
if(x_error>10 and max_blob.density()>0.7 and 70>max_blob.w()>8):#设为-5是留有一定的误差空间,因为不一定小球非要在正中间才能被收集
#stable_output('r')
uart.write('r')
flag = 1 #标记本轮发现过目标
count = 0 #发现目标,count置为0,从头开始计数
lcd.draw_string(10, 20, "Right", lcd.RED, lcd.WHITE)
if bug_open == True:
print("黄球,串口发送:r,","blob.density(): ", max_blob.density(),"blob.w(): ", max_blob.w())
if(-10<x_error<10 and h_error<0 and max_blob.density()>0.7 and 70>max_blob.w()>8):
#stable_output('h')
uart.write('h')
flag = 1 #标记本轮发现过目标
count = 0 #发现目标,count置为0,从头开始计数
lcd.draw_string(10, 30, "Head", lcd.RED, lcd.GREEN)
if bug_open == True:
print("黄球,串口发送:h,","blob.density(): ", max_blob.density(),"blob.w(): ", max_blob.w())
else:
stable_output('t')
if bug_open == True:
print("无黄,串口发送:t,")
#检测白球时,开启白平衡效果会更好一点
sensor.set_auto_whitebal(True) # must be turned off for color tracking,开启白平衡
img = sensor.snapshot().histeq(adaptive=True, clip_limit=3)
img.lens_corr(1.8) #镜头畸变矫正(lens correction),lens_corr 为了去除畸变, 1.8 是默认参数,可以根据自己实际情况调整
#思想:先识别出圆形,再识别圆的颜色
#img.find_circles:控制从霍夫变换中监测到的圆。
for c in img.find_circles(threshold = 3500, x_margin = 10, y_margin = 10, r_margin = 10,
r_min = 2, r_max = 100, r_step = 2):
#area为识别到的圆的区域,即圆的外接矩形框
area = (c.x()-c.r(), c.y()-c.r(), 2*c.r(), 2*c.r())
##保存检测到的其中一个圆的一些参数,用于控制小车方向的计算
#target = (c.x(), c.y(), c.r())
#像素颜色统计,roi 是感兴趣区域的矩形元组(x,y,w,h)。如果未指定,ROI即整个图像的图像矩形。操作范围仅限于 roi 区域内的像素。
statistics = img.get_statistics(roi=area)
#l_mode(),a_mode(),b_mode()是L通道,A通道,B通道的众数。
if color[0][0]<statistics.l_mode()<color[0][1] and color[0][2]<statistics.a_mode()<color[0][3] and color[0][4]<statistics.b_mode()<color[0][5]:#if the circle is red
img.draw_circle(c.x(), c.y(), c.r(), color = (255, 255, 255),thickness=5)#识别到的白色圆形用白色的圆框出来
#保存检测到的其中一个圆的一些参数,用于控制小车方向的计算
target = (c.x(), c.y(), c.r())
#elif color[1][0]<statistics.l_mode()<color[1][1] and color[1][2]<statistics.a_mode()<color[1][3] and color[1][4]<statistics.b_mode()<color[1][5]:#if the circle is red
#img.draw_circle(c.x(), c.y(), c.r(), color = (255, 255, 0))#识别到的黄色圆形用黄色的圆框出来
##保存检测到的其中一个圆的一些参数,用于控制小车方向的计算
#target = (c.x(), c.y(), c.r())
else:
img.draw_circle(c.x(), c.y(), c.r(), color = (0, 0, 0),thickness=5)#识别到的白色圆形用白色的圆框出来
target = (c.x(), c.y(), c.r())#其实这里应该不加这一句,但为了演示效果更好,让小车也追一下圆形
if target:
flag = 1 #标记本轮发现过目标
#一张图只保留一个小球的信息,只追一个小球
x_error = target[0]-img.width()/2 #若x_error<0,则说明小球在左边,小车需要左转,若x_error>0,则说明小球在右边,小车需要右转
h_error = 2*target[2]*2*target[2]-size_threshold #若h_error<0,则小车距离小球还有距离,需要前进。
if(x_error<-10):#设为-5是留有一定的误差空间,因为不一定小球非要在正中间才能被收集
#stable_output('l')
uart.write('l')
count = 0 #发现目标,count置为0,从头开始计数
if bug_open == True:
print("白球,左转,发串口:l")
lcd.draw_string(10, 10, "Left", lcd.RED, lcd.YELLOW)
if(x_error>10):#设为-5是留有一定的误差空间,因为不一定小球非要在正中间才能被收集
#stable_output('r')
uart.write('r')
count = 0 #发现目标,count置为0,从头开始计数
if bug_open == True:
print("白球,右转,发串口:r")
lcd.draw_string(10, 20, "Right", lcd.RED, lcd.WHITE)
if(10>x_error>-10 and h_error<0):
#stable_output('h')
uart.write('h')
count = 0 #发现目标,count置为0,从头开始计数
if bug_open == True:
print("白球,前进,发串口:h")
lcd.draw_string(10, 30, "Head", lcd.RED, lcd.GREEN)
else:
stable_output('t')
if bug_open == True:
print("无白色球,发串口:t")
target=()#清空target
#控制视野内无球时,自动慢速右转
if flag == 0:
count = count+1
if count%10 == 0:
uart.write('s')
utime.sleep_ms(10)
uart.write('n') #通过串口向外发送数据,没有检测到黄色或白色小球
if bug_open == True:
print("视野无球,发串口:n")
lcd.draw_string(250, 10, "FPS %f" % clock.fps(), lcd.BLACK, lcd.RED)
count = 0
flag = 0 #重置标记
if bug_open == True:
print("FPS %f" % clock.fps())#停止追踪运行时间,并返回当前FPS(每秒帧数)。在调用该函数前始终首先调用 tick
print("flag:",flag,"count:",count)
lcd.display(img) #LCD 显示图片
如何提高小球检测成功率:
在最后检测的阶段,发现对于小球的检测存在不小的误差,经过实验,黄色小球直接使用色块查找比先找圆形在检验颜色的方法成功率高,所以黄色球直接颜色匹配。白色小球两种方法的效果都不大好,主要因为灯光和环境颜色的因素,导致白色小球和环境融合度高,不易被检测到,因此考虑能否调节亮度看看能不能改善一下效果。
查看了摄像头模块的库函数,可以设置对比度、亮度、饱和度、自动增益等,
(69条消息) 【K210】K210学习笔记一——sensor_k210摄像头模块_欠羽的博客-CSDN博客这篇文章探讨了自动增益,白平衡对图像呈现效果的影响。得出的结论是,颜色识别要关闭白平衡、自动增益要手动设置一个合适的值。
下面要上传脚本到开发板:参考上传脚本&模块到开发板 - Sipeed Wiki
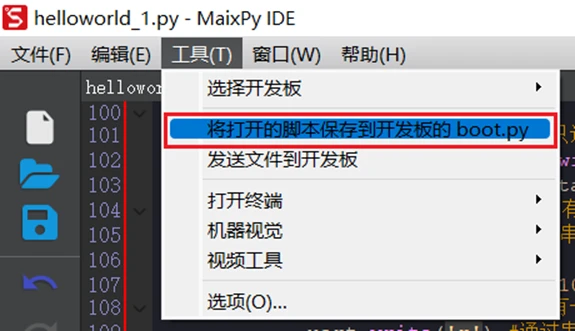
运行这两行来检查是否保存成功:
import os
os.listdir()
若运行之后并没有显示出boot.py文件,如下图:

我都怀疑是出现问题了,小找了一下但没找到原因,后来自己试出来的方法:在显示完保存脚本成功后需要按一下板子的reset键,之后再上电,脚本就会直接运行了。所以其实脚本已经上传到开发板上了。
然后就是k210与stm32的连接了:
这个视频的一条评论给出了答案(心酸)
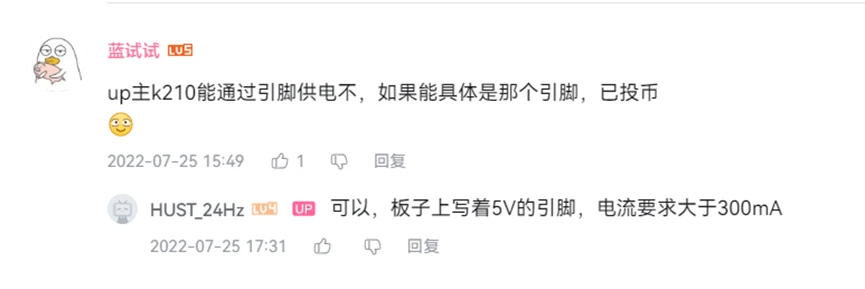
虽然理论上可以通过5V引脚给板子供电,一开始我这样做的,也确实能够正常工作,但做到后面,有时会出现k210的那块显示屏突然一闪然后不显示摄像头画面,板子上有电却无法正常工作。因为并没有找到是什么原因导致地这一现象,但后来我使用Micro口供电后这一问题便迎刃而解了。
| K210(Micro额外供电) | STM32F103C8T6 |
|---|---|
| GND | GND |
| IO10(TXD) | Rx(PB11) |
| IO9(RXD) | Tx(PB10) |
3. 在Keil中main.c中编写代码
接下来,在单片机stm32上新创建一个用于收发的串口,之前用于蓝牙通信使用了串口2、这次我使用串口3,串口3的配置参照串口2的配置。
main.c中代码如下:
新定义一个变量用于接收串口三发送的数据,和控制串口2优先的标志(因为串口2直接与用户接触,优先级更高,串口2可以理解为手动模式控制,串口3为巡逻模式自动捡球,当处于手动模式时,禁止自动捡球)
uint8_t usart3ReceiveData;
int openUsart3Flag= 0;//openUsart3Flag为1表示开启巡逻模式自动捡球,为0表示不开启

开启串口3中断
HAL_UART_Receive_IT(&huart3,&usart3ReceiveData,1);

在中断回调函数中补充串口3的内容
小插曲
在编写中断回调函数的时候,我想加一个HAL_delay()函数,结果程序烧录后,小灯就不亮了,显然程序不知道卡在哪里了,搜索后找到解决办法:
(72条消息) STM32 中断中调用HAL_Delay卡死的原因及解决方法_delay中断优先级_BigProgrambug的博客-CSDN博客
t=3127; while(t--);
大致相当于HAL_Delay(1);即延时一毫秒;
4). 手机端蓝牙调试器的设置
对“自动巡逻”、“手动”两个按钮进行设置

编辑页面如下图:
| 自动巡逻 | 手动 |
|---|---|
| [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-c8qnQlRy-1688999688895)(https://article.biliimg.com/bfs/article/9e03cd0da49d4540663cdb116d2cb7cb86a80d08.png)] | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-zuNatUin-1688999688903)(https://article.biliimg.com/bfs/article/437f862e9fd22c28ae26a5b9fefa2a930bc0dac5.png)] |
至此第七阶段的内容告一段落,准备下一阶段的学习。
第八阶段:学习原理图的绘制
到这里,本项目的大部分工作已经完成,只剩下一些小tesk。这一阶段主要讲如何给项目绘制它的原理图。
学习使用在线使用的嘉立创的EDA绘制原理图,网址:嘉立创EDA(标准版) - 免费、易用、强大的在线电路设计软件 (lceda.cn)
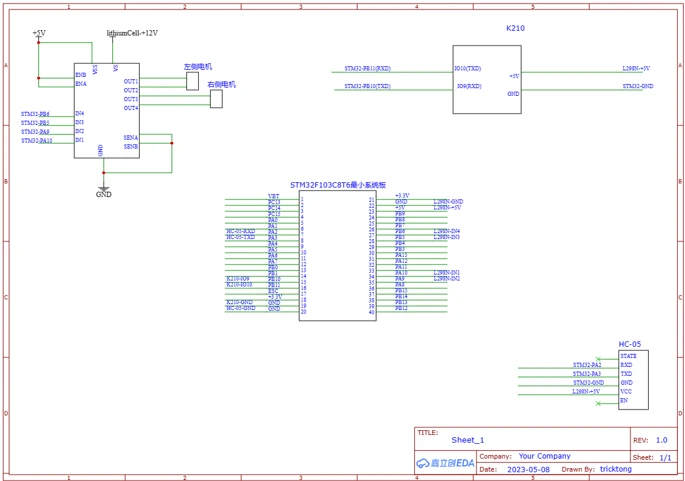
在嘉立创EDA中导出的PNG图像在拉伸时容易模糊,这个视频的20:00介绍在Altium Designer Summer中导出不模糊的方法:(在文件里的打印预览里进行复制后粘贴,不过颜色是灰色)
补充:想改为彩色可以右键预览图,点击Page Setup,有个color set,将其选中Color即可。
后来我发现一个方法:导出为svg格式的文件,然后直接将svg文件复制,粘贴到word中。
不过我还是觉得学习一下Altium Designer Summer软件的使用总没错,搜了一个学习教程:(83条消息) Altium Designer绘制stm32f103c8t6最小系统原理图_stm32f103c8t6原理图_牛奶yu茶的博客-CSDN博客
在将schlib中元件放到schdoc中时,元件老是跑到schdoc边框外面,导致无法选中,解决办法:ctrl+a全选,然后向下拖一点点。
参考:altium 画原理图添加的器件在边框外面挪不动进不了图框_百度知道 (baidu.com)
至此第八阶段的内容告一段落,准备下一阶段的学习。
第九阶段:亚克力板定制需要cad图纸
在淘宝上找人制作亚克力板时老板说必须要CAD图纸才能做,这一阶段主要讲如何绘制简单的CAD图。
安装包网盘地址:AutoCAD 2023 简体中文版_免费高速下载|百度网盘-分享无限制 (baidu.com)
网盘提取码:acad
照着视频安装完后打开软件,报错:
我选择忽略这个错误,软件能用就行。
AutoCAD入门教程(我只看了p1、p2、p3、p4、p6):https://www.bilibili.com/video/BV1pR4y1C7AQ?p=1&vd_source=ec7c0e8776ec5da069e2d080157bdbc2
在标注尺寸时,需要额外设置,参考学习:CAD如何尺寸标注,标注样式怎样设置,大神教你快速标注秘诀!_哔哩哔哩_bilibili
学习笔记:
Dli:创建线性标注
Dal:斜着标注
Rec 空格 鼠标左键 d 空格 输入长度 空格 输入宽度 空格:创建矩形
C 空格 鼠标左键 d 空格 输入直径 空格:输入直径画圆
画完结果:

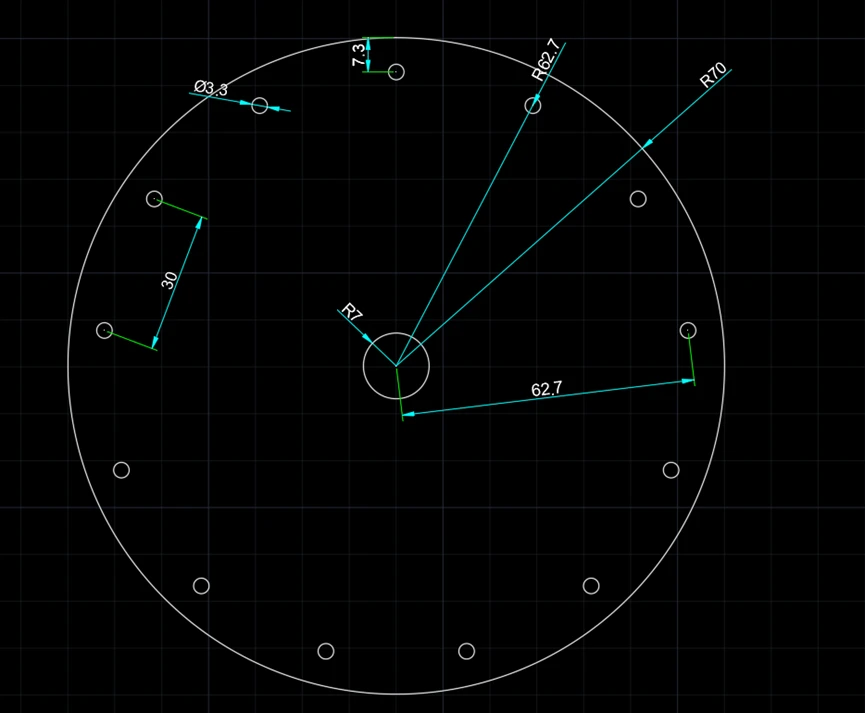
上述图形的cad图文件在**其他资料**里可以找到
至此第九阶段的内容告一段落,准备下一阶段的学习。
第十阶段:红外避障模块的学习使用
这一阶段主要讲红外避障模块,之所以把它放在偏后面来说是因为我使用起来效果不大理想,传感器测距不精确,不好调节,而且在小车运动时产生震动,控制传感器测距的距离的螺丝容易松动,这导致可能上一秒刚调完只测范围30cm的障碍物,下一秒弹到测半米内的障碍物了,如果日后有机会可以尝试下超声波避障传感器的学习使用,这个用的挺多的。
一开始学习使用时,到网上搜索:“STM32 HAL库 红外避障”,找到一篇文章教学
(79条消息) 【STM32】标准库与HAL库对照学习教程外设篇–红外避障传感器_stm32红外避障传感器_修成真的博客-CSDN博客
我是照着这篇文章做的,但是里面的内容只是操作步骤,至于为什么没有讲解,就是没讲原理,但它提供了一个重要信息,GPIO_EXTI引脚的使用。
我查看红外避障原件的淘宝连接:红外壁障模块/避障小车避障传感器/黑白线识别 距离可调 光电开关-淘宝网 (taobao.com)
了解到:
连接方式:VCC-VCC;GND-GND;OUT-IO
当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT端口持续输出低电平信号,反之,绿灯灭,引脚输出高电平,
红外避障元件就三个引脚,最值得注意的就是out引脚,这个引脚就要与stm32的GPIO_EXTI引脚来接收。
学习stm32的GPIO_EXTI引脚,看这篇文章:(79条消息) STM32CubeMX学习笔记(3)——EXTI(外部中断)接口使用_hal_gpio_exti_irqhandler_Leung_ManWah的博客-CSDN博客
在看到这里时:
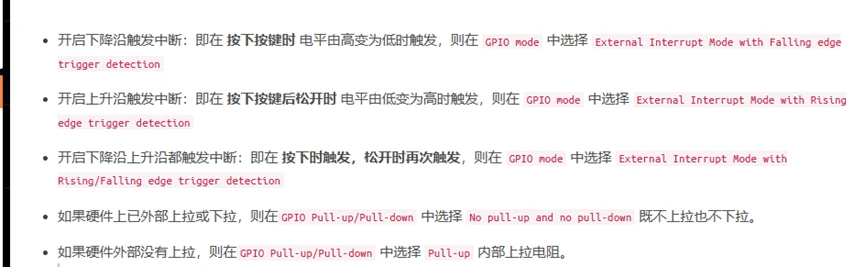
根据红外避障原件的特性:有障碍物发低电平,无障碍物发高电平。因此应该选择下降沿触发中断。
但是硬件上已外部上拉这里我不清楚,
恶补下硬件知识:
对于普通的单片机I/O,输入口具有上拉和下拉能力是什么意思啊?望高手解释下!_百度知道 (baidu.com)
查看了stm32f103系列的文档:


这里的硬件上外部上拉是指有没有在单片机外面自己配置电阻,显然我没有电阻,所以应该选择内部上拉电阻。

而且: 单个红外避障模块检测距离2~30cm,检测角度35°
我有三个元件,前面弄俩,后面弄一个。
照着这篇文档的操作步骤,我选择设置PA1、PA4、PA5为避障模块out的信号接收引脚,PA1在前左、PA4在前中、PA5在前右
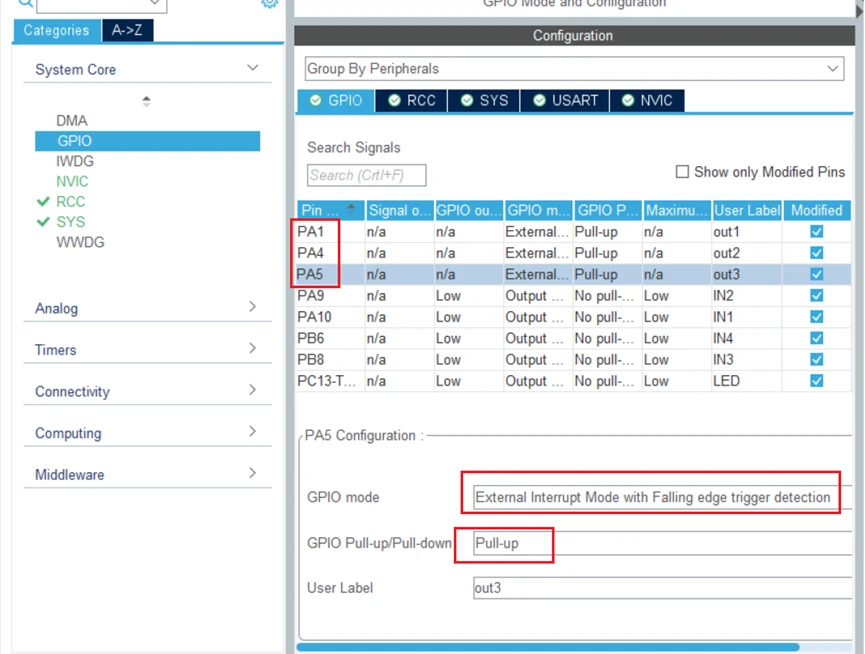
然后生成代码。
在编写红外避障对应的回调函数时,有个问题,就是避障时应该关闭巡逻模式的串口数据传输,就是在躲避障碍物的时候,即使发现了小球,也应该优先去躲避障碍物,而不是避障的同时也执行着前去捡球的功能。
自然而然地想到了设置两个外部中断地优先级的方法来控制,(之前蓝牙串口和k210俩串口其实也可以这样来搞,但是当时没想到优先级,就设置了一个信号量来控制,这样也能实现)
但我觉得用优先级显得简单一点,逻辑更清晰一点。
恶补知识点:(79条消息) STM32 EXTI外部中断及NVIC的抢占优先级和响应优先级解释_一个旅者的博客-CSDN博客
设置如下:
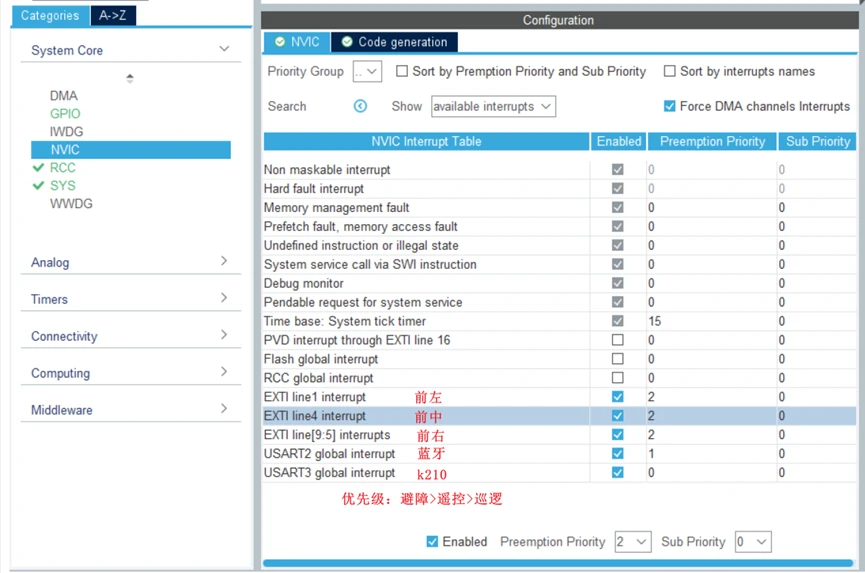
在main.c编写的避障模块回调函数:
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin==out1_Pin)
{
infrared_signal1 = 'T';
__HAL_GPIO_EXTI_CLEAR_IT(out1_Pin); //清除中断标志
}
else if(GPIO_Pin==out2_Pin){
infrared_signal2 = 'T';
__HAL_GPIO_EXTI_CLEAR_IT(out2_Pin); //清除中断标志
}
else if(GPIO_Pin==out3_Pin){
infrared_signal3 = 'T';
__HAL_GPIO_EXTI_CLEAR_IT(out3_Pin); //清除中断标志
}
}
编译后没有error,烧录到stm32上,连接引脚,上电运行。
一开始传感器绿灯一直亮,表示一直有障碍物,这时候可能是因为设置的检测距离太远,可以调节一下检测距离,调节方法:旋转传感器上的螺丝(旋钮),参考:(81条消息) E18-D80NK 红外避障传感器怎么调检测距离-其他-CSDN问答,
至此第十阶段的内容告一段落,准备下一阶段的学习。
第十一阶段:给电源加上一个开关
为什么要加上一个开关呢?一是每次通电都要手动插上电源,有时候还插歪了,还有就是小车运动一段时间后,蓝牙和k210好几次都无故断电,不工作了,我怀疑可能是接线问题
于是搜相关问题,发现一篇文章讲了电源通电时注意不烧坏单片机的我觉得挺有道理的。就是“一定要先接通负极再接正极。“
参考链接:(94条消息) STM32接电机驱动,杜邦线供电,然后反烧问题_stm32供电最大电流_我与nano的博客-CSDN博客
于是后来给能源加上一个开关,的使用方法:
船型开关也叫翘板开关它的接线脚有两个接线柱和三个接线柱的,下面华琴小编带你了解船型开关、跷板开两脚和三脚的差异:
1、两脚船型开关、翘板开关
船型开关和通常的开关一样,起个断开和接通电路的效果。绝不允许将他的两个接线柱一个接正极一个接负极,那样会短路的。
准确的接法是,电源的正极进入船型开关的任意一接线柱都可以,然后它的另一接线柱引出接入负载后再回到电源负极。
2、三脚船型开关、翘板开关
三个接线柱的应当不会有指示灯,而是带常开常闭点的,通常中心的是公共点,两头的是常开或常闭(即是不同方位的开关)
做转换开关时,中心的是动触点,两头的是定触点;做单个开关时,可以只接中心柱和边上任意一柱。
参考链接:电源插座,船形开关,8字插座,品字插座,AC插座厂家,梅花插座,八字插座,东莞市华琴电子有限公司 (huaconn.com.cn)
至此第十一阶段的内容告一段落。
第十二阶段:STM32F103C8T6的一个引脚烧坏了怎么办?
新手学习单片机有可能会遇到将某个GPIO口烧坏的情况,此时不必惊慌,只需要用另一个具有同样功能的引脚代替,然后将keil中与之相关的代码也换成另一个引脚即可。这一阶段主要讲如何更换烧坏的引脚。
LED3中的PB5引脚烧坏,使用PB8替换这个引脚为LED4工程
做修改引脚的工作时,我先将LED3复制一份并命名为LED4,打开LED4的ioc文件,在cubeMAX中编辑引脚。我将无法使用的引脚(PB5)设为Reset_State状态,
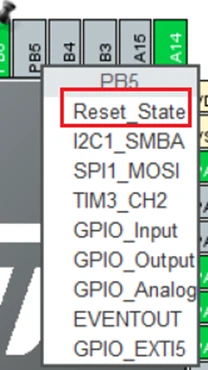
然后查看的STM32F103c8t6的引脚,再找一个GPIO口,我选择PB8这个引脚

将PB8设为GPIO口,标签改为IN3
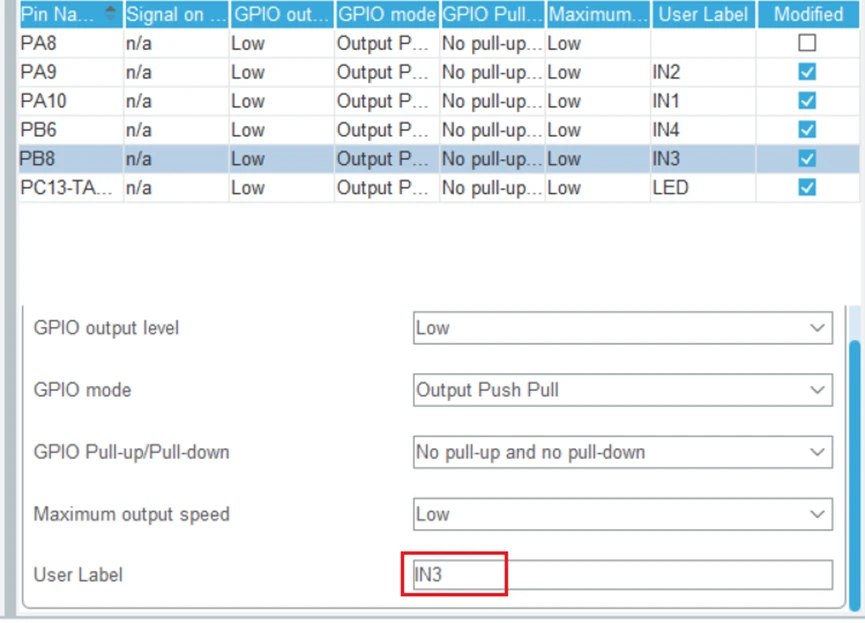
其他的都不改,直接点击GENERATE CODE,生成代码,再选择open project
来到keil编辑器中,使用快捷键Ctrl+f,查找所有的PB5,就搜“GPIO_PIN_5 “就行,
得到结果:
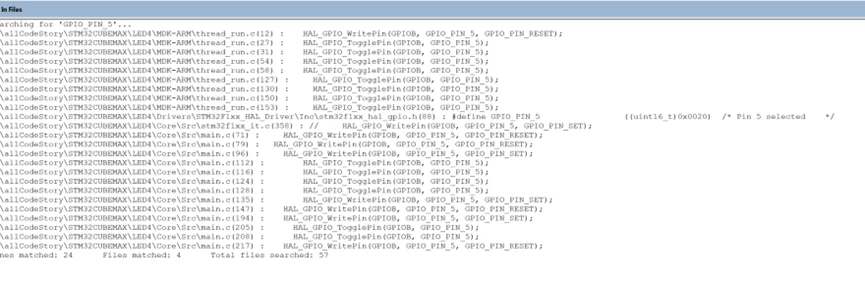
所以我们只需要修改thread_run.c和main.c中的代码即可,将PB5都改为PB8.
比如说这一个,我们只要将数字5改成8即可:
改为:
全部修改完之后,先编译一下,没毛病:

然后就是烧录到单片机上运行看看,烧录时一定记得将锂电池的供电关闭(否则引脚又烧了别怪别人)
烧录完就更改接线,将L298N的IN3接到PB8即可。
然后就是给小车通电。到此更换引脚的工作结束。全部修改完之后,编译,烧录,小车上电测试
至此第十二阶段的内容告一段落。
补充
1. 误把SWD调试接口禁用,导致无法烧录
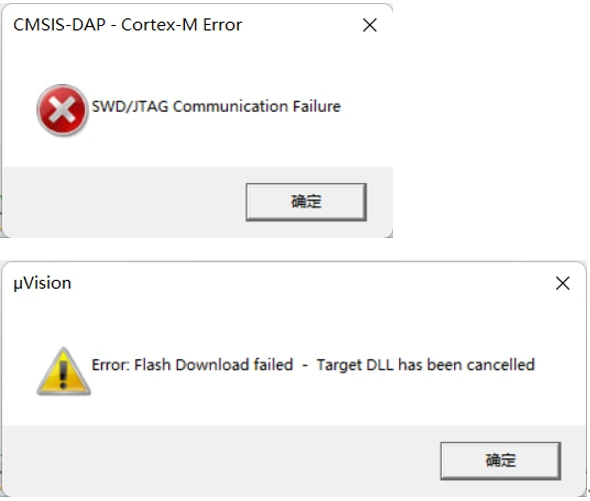
烧录时弹出的窗口,打开魔法棒发现设备通信失败:
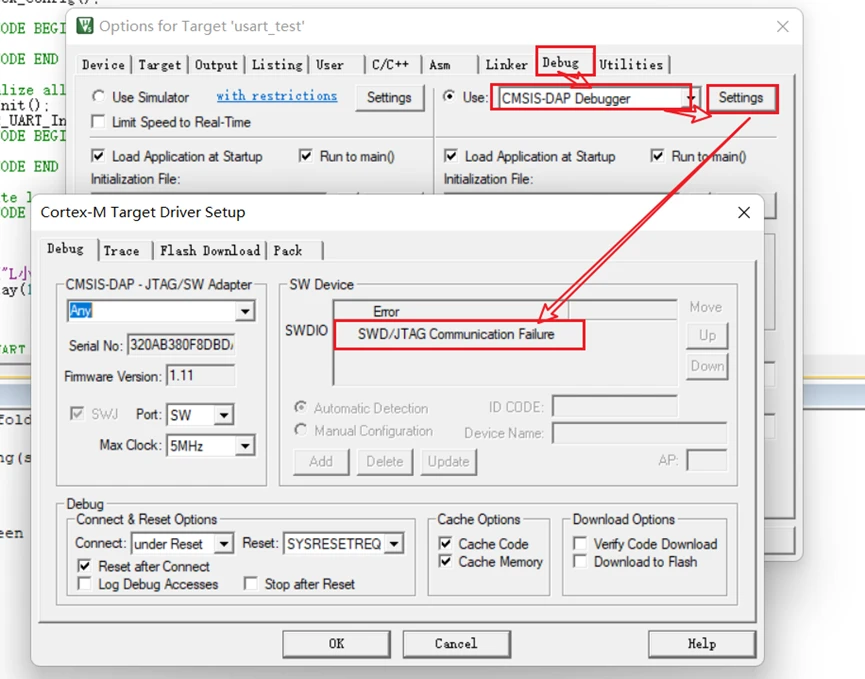
我怀疑的问题就出现在,有一次我新建了一个项目用来测试串口通信的,结果在sys设置那里没有设置Serial Wire,然后就稀里糊涂生成了代码,然后烧录,我也不记得有没有烧录成功,但后来就无法烧录了,使用之前可以烧录的项目进行烧录也无法烧录,我一度怀疑是不是板子或烧录器被我玩坏了。
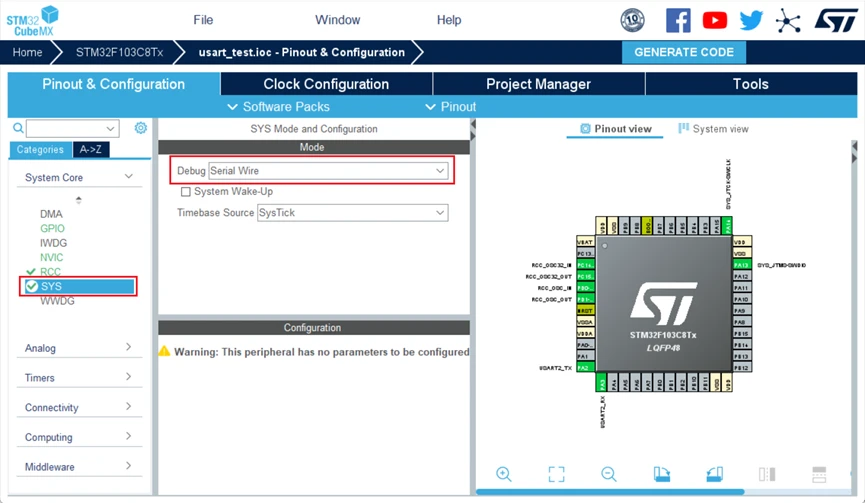
后来上网搜了问题的解决办法,发现应该是我把SWD调试接口禁用了,详情见文章:在MDK调试STM32出现“could not stop cortex-m device”解决办法 - 简书 (jianshu.com)
然后找了解决办法:
1.板子上电之前将BOOT0引脚接到3.3V高电平
2.板子上电
3.重新烧录程序
4.BOOT0置地电平
和原文档中说法有点不一样,我的情况和评论里一位大佬一样:

(65条消息) keil提示仿真器SWD/JTAG Communication Failure的问题解决_y511374875的博客-CSDN博客
总之有惊无险地解决了问题,又可以烧录了。
这样设置一次烧录成功后,之后把boot0再次接到0v,也可以像往常一样烧录了。回归了正常。
附件
一、官网
Openmv官方网站:追小球的小车 · OpenMV中文入门教程
Openmv函数资料:MicroPython 函数库 — MicroPython 1.9.2 文档 (singtown.com)
MaixPy 文档简介:MaixPy 文档简介 - Sipeed Wiki
二、B站视频
一、 去b战找视频做了。
库函数开发项目视频教学:[stm32入门教程][STM32实战项目]STM32智能小车教程-循迹-避障-蓝牙遥控-跟随-stm32f103c8t6-stm32最小系统-手把手入门教程_哔哩哔哩_bilibili
HAL库开发项目视频教学:STM32智能小车V3-STM32入门教程-STM32项目-STM32循迹小车 避障 蓝牙遥控 课设 毕设 电赛 嵌入式学习 PID控制算法 编码器电机 跟随_哔哩哔哩_bilibili
MaixPy 上手教程:[k210] MaixPy 上手教程_哔哩哔哩_bilibili
三、感兴趣的文档
(57条消息) K210快速上手教程(色块、人脸、声源识别等)_k210教程_Smalld_cat的博客-CSDN博客
找圆算法:
opencv —— HoughCircles 霍夫圆变换原理及圆检测
找圆算法((HoughCircles)总结与优化_我不是校长的博客-CSDN博客
色块识别的改善:(88条消息) openmv学习之旅②之色块追踪算法的改善_openmv不同颜色的一般阈值__杰杰_的博客-CSDN博客
这个连接也是做捡球小车的,他的小车的外貌,组装和捡球思路可以给我提供改进的思路。
捡球机器人 - DF创客社区 - 分享创造的喜悦 (dfrobot.com.cn)
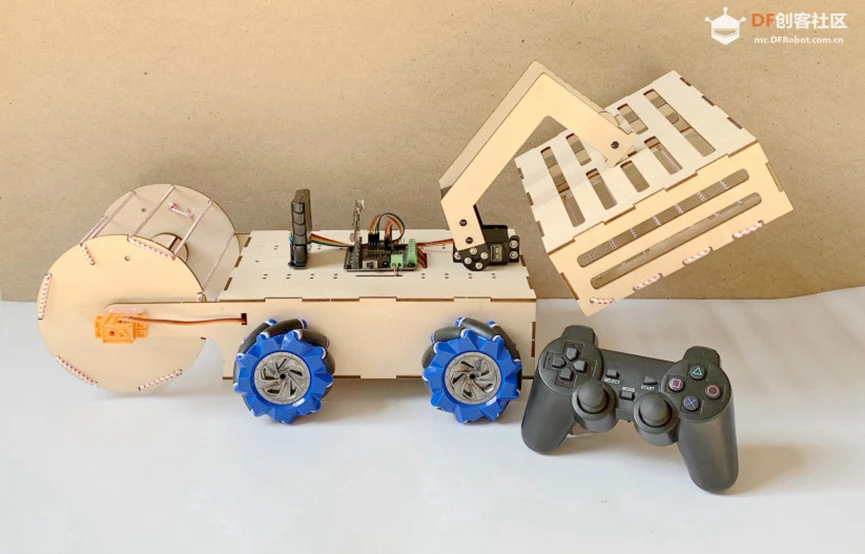
额外准备的小问题(部分)
一、STM32单片机的供电方式?
有两种方法:
第一,通过Micro USB接口供电;第二,通过5V或3.3V的引脚给单片机供电,5V供电时,单片机内部有调压器将5V调为3.3V。
关于电源的一些符号说明:(106条消息) STM32F103电源引脚分析对比_stm32f103供电架构_王小琪0712的博客-CSDN博客
2. ¿Cómo lidiar con el puente en el microcontrolador STM32?
boot0 y boot1, boot0 está relacionado principalmente con el método de grabación
3. Sentido común
Voltaje de funcionamiento del motor tt DC: 3V~6V
La función del condensador de filtro es hacer que el nivel sea más estable.
Utilizando un reloj externo de alta velocidad generado por un resonador de cristal/cerámica, el reloj externo de alta velocidad (HSE) se puede generar utilizando un oscilador compuesto por un resonador de cristal/cerámica de 4~16MHz.
64K bytes de memoria flash incorporada para almacenamiento de programas y datos, 20K bytes de SRAM incorporada

Controlador de eventos/interrupciones externo (EXTI)
El controlador de eventos/interrupciones externo contiene 19 detectores de borde para generar solicitudes de eventos/interrupciones. Cada línea de interrupción puede configurar de forma independiente su evento de activación (flanco ascendente o descendente o ambos flancos) y puede enmascararse de forma independiente; hay un registro pendiente para mantener el estado de todas las solicitudes de interrupción.
RTC (reloj en tiempo real), receptor-transmisor síncrono/asíncrono universal (USART)
Los productos de la serie mejorada STM32F103xx incluyen 1 temporizador de control avanzado y 3 temporizadores normales.
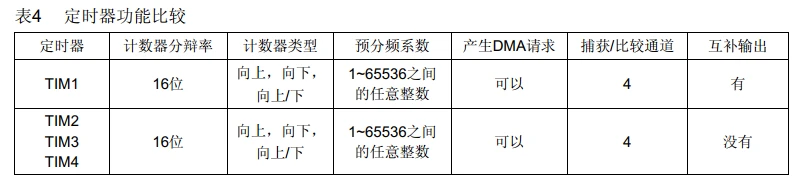
Cada pin GPIO de la interfaz de entrada y salida de uso general (GPIO)
se puede configurar mediante software como salida (push-pull o drenaje abierto), entrada (con o sin desplegable o desplegable) o multiplexada. Puerto de función periférica. La mayoría de los pines GPIO se comparten con periféricos analógicos o digitales multiplexados. Excepto los puertos con funciones de entrada analógica, todos los pines GPIO tienen altas capacidades de paso de corriente.
4. Explicación esquemática:
Segunda capacitación STM32 (explicación esquemática, precauciones de soldadura)_bilibili_bilibili