Tabla de contenido
1. Vista previa de las representaciones de operaciones del algoritmo.
2.Algoritmo que ejecuta la versión del software
4. Descripción general de la teoría de algoritmos
5. Ingeniería de programa completo de algoritmos.
1. Vista previa de las representaciones de operaciones del algoritmo.



2.Algoritmo que ejecuta la versión del software
matlab2022a
3. Algunos programas básicos
clc;
clear;
close all;
warning off;
addpath(genpath(pwd));
rng('default')
load FRCNN.mat
In_layer_Size = [224 224 3];
imgPath = 'smoke_train/'; % 图像库路径
imgDir = dir([imgPath '*.jpg']); % 遍历所有jpg格式文件
cnt = 0;
for i = 1:length(imgDir) % 遍历结构体就可以一一处理图片了
i
if mod(i,12)==1
figure
end
cnt = cnt+1;
subplot(3,4,cnt);
img = imread([imgPath imgDir(i).name]); %读取每张图片
I = imresize(img,In_layer_Size(1:2));
[bboxes,scores] = detect(detector,I);
[Vs,Is] = max(scores);
if isempty(bboxes)==0
I1 = insertObjectAnnotation(I,'rectangle',bboxes(Is,:),Vs);
else
I1 = I;
Vs = 0;
end
imshow(I1)
title(['检测置信度:',num2str(Vs)]);
if cnt==12
cnt=0;
end
end
0056
4. Descripción general de la teoría de algoritmos
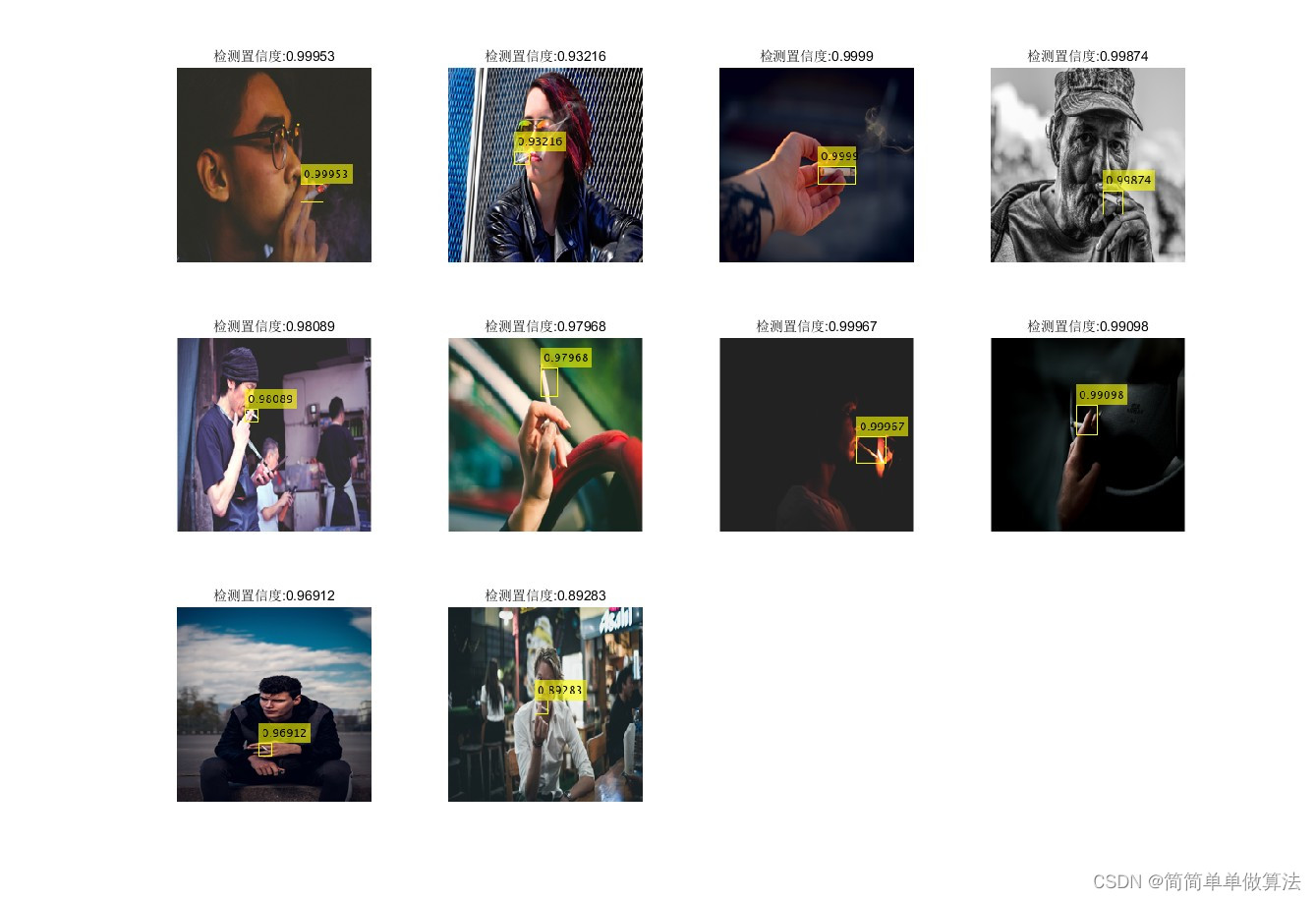
El algoritmo de detección del comportamiento de tabaquismo del personal basado en la red de aprendizaje profundo Faster R-CNN es un método que utiliza tecnología de aprendizaje profundo para detectar el comportamiento de tabaquismo del personal. Este algoritmo se basa principalmente en la estructura de red Faster R-CNN y logra la detección del comportamiento de fumar detectando objetivos y extrayendo características de personas en videos o secuencias de imágenes.
- Principio del algoritmo
El principio de este algoritmo se divide principalmente en tres pasos: propuesta de región, extracción de características y clasificación de objetivos.
(1) Propuesta regional
En la etapa de propuesta de región, el algoritmo genera una serie de regiones objetivo a través de la Red de propuesta de región (RPN). RPN es una estructura de red neuronal basada en una red neuronal convolucional (CNN) que, al realizar una operación de convolución en la imagen de entrada, extrae el mapa de características de la imagen y genera una serie de áreas objetivo de acuerdo con reglas preestablecidas. Estas áreas objetivo pueden contener objetivos como caras y cigarrillos, pero no contienen información de fondo.
(2) Extracción de características
En la etapa de extracción de características, el algoritmo ingresa el área objetivo extraída en una red neuronal convolucional (CNN) para la extracción de características. CNN es una estructura de red de aprendizaje profundo que extrae las características de los datos realizando operaciones de convolución en los datos de entrada. Al realizar una operación de convolución en el área objetivo, se puede obtener el mapa de características del área objetivo.
(3) Clasificación de objetivos
En la etapa de clasificación de objetivos, el algoritmo ingresa el mapa de características extraído en la capa completamente conectada (FC) para su clasificación y corrección de bordes. FC es una estructura de red de aprendizaje profundo que se utiliza para asignar datos de entrada al espacio de etiquetas de destino. Al realizar una operación completamente conectada en el mapa de características, se pueden obtener los resultados de clasificación y la información de los límites del área objetivo.
Las fórmulas principales de este algoritmo incluyen la fórmula de red neuronal convolucional (CNN), la fórmula de RPN y la fórmula de FC.
(1) Fórmula de red neuronal convolucional (CNN)
CNN es una estructura de red de aprendizaje profundo de uso común, que se utiliza principalmente para la extracción de características de imágenes. Su estructura básica incluye múltiples capas convolucionales, capas de agrupación y capas completamente conectadas. Entre ellos, la capa de convolución se usa para realizar operaciones de convolución en la imagen de entrada y extraer las características de la imagen; la capa de agrupación se usa para reducir la muestra del mapa de características y reducir la cantidad de parámetros de red; la capa completamente conectada se usa para mapear el mapa de características al espacio de etiquetas de destino para tareas como clasificación y regresión.
La fórmula de CNN es la siguiente:
![]()
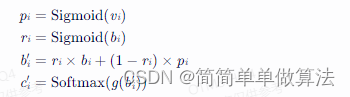
(2) fórmula RPN
RPN es una red de generación de regiones objetivo basada en CNN que se utiliza para generar una serie de regiones objetivo. Su estructura básica es similar a CNN, pero se agregan dos capas completamente conectadas después de la última capa convolucional para generar información del cuadro delimitador e información de confianza del área objetivo. La fórmula de RPN es la siguiente:
(3) fórmula FC
FC es una estructura de red de aprendizaje profundo que se utiliza para asignar datos de entrada al espacio de etiquetas de destino. Su estructura básica es una capa completamente conectada, donde cada nodo está conectado a todos los nodos de la capa anterior.
La fórmula de FC es la siguiente:
![]()
5. Ingeniería de programa completo de algoritmos.
OOOOO
OOO
oh