우선, 기획 모듈은 시나리오, 단계, 작업의 레벨, 즉 시나리오 -> 단계 -> 구체적인 의사결정 방식을 기반으로 한다는 점을 이해해야 합니다. Apollo는 자율주행이 직면한 다양한 도로 시나리오에 대처할 수 있으며, 모든 시나리오는 Scenario를 통해 등록 및 관리됩니다. 시나리오는 유한 상태 기계를 사용하여 현재 운전 장면을 판단하고 선택합니다. 각 시나리오 아래에는 현재 장면에서 실행해야 하는 대략적인 단계를 나타내는 여러 단계가 있습니다.
Planning 모듈은 라우팅(내비게이션 모듈), 예측(인식 모듈)으로 인지된 주변 환경 정보와 지도 위치 및 내비게이션 정보(좌표, 속도, 가속도, 저크, 시간 등 포함)를 기반으로 자율주행차의 궤적을 계획합니다. 등) 을 입력한 다음 이 정보를 제어 모듈에 전달합니다.
기사 디렉토리
필요하다
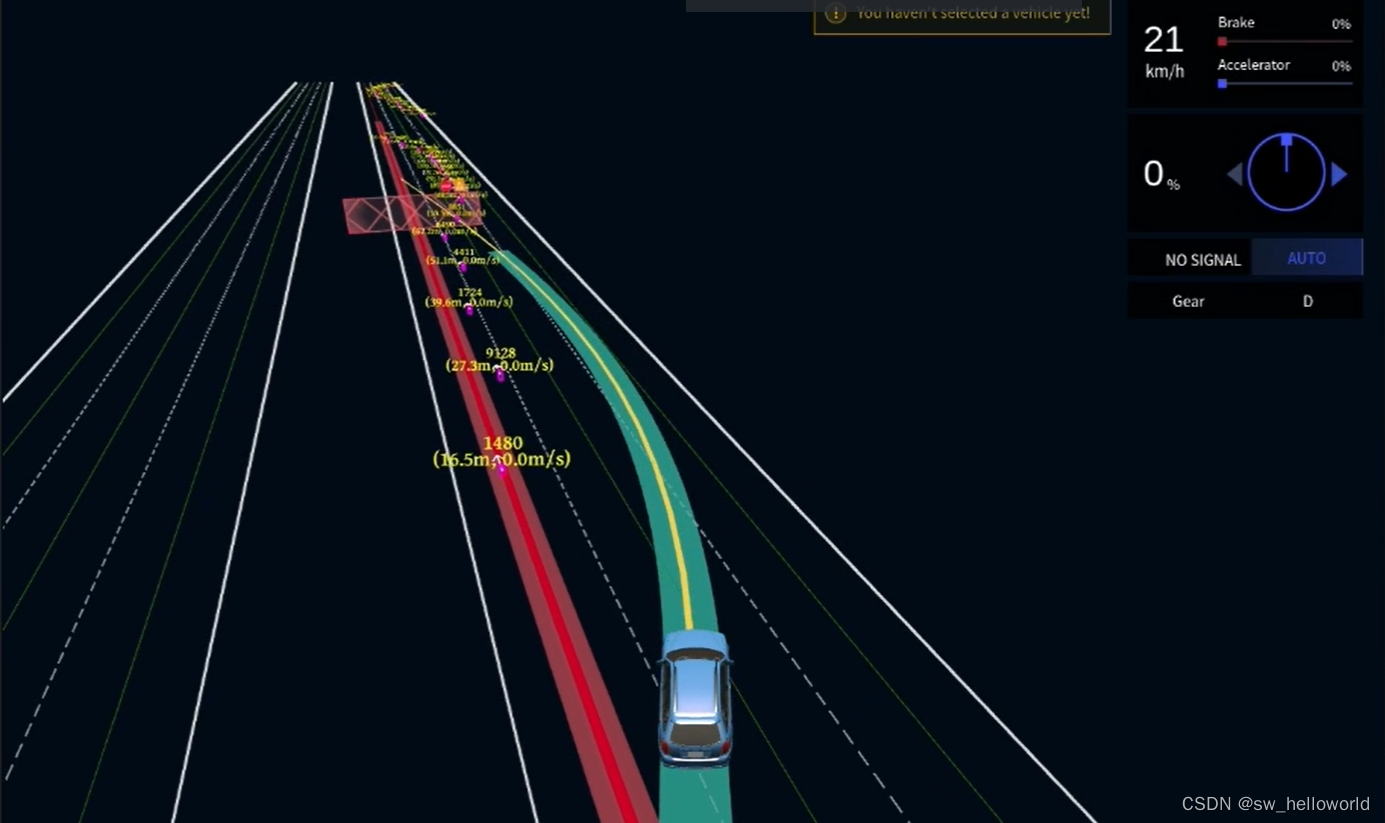
차량은 원뿔로 표시된 공사 구역을 피할 수 있으며 공사 구역 통과 시 속도는 30km/h를 초과할 수 없으며 공사 구역을 초과한 후에는 제한 속도가 다시 시작됩니다.