Directorio de artículos
prefacio
Compré una placa Arduino hace mucho tiempo, pero hasta ahora he estado comiendo cenizas. Recientemente, dediqué tiempo a estudiar y descubrí que este tablero es un tablero de entrada imprescindible para Xiaobai ( la capa inferior está muy empaquetada y es rica en información ). Por supuesto, aunque Arduino es simple, esto no afecta sus poderosas funciones, creo que en el proceso de aprendizaje se puede cosechar la alegría de la creación.
Estoy acostumbrado a registrar los experimentos que he realizado y cada capítulo presentará un tipo de hardware y funciones relacionadas . La combinación de varios capítulos es un artículo y, al final de cada artículo, se realizará un pequeño proyecto integral . Se utilizarán los conocimientos aprendidos en los capítulos anteriores.
Este es el primer artículo , ¡nuestro objetivo es hacer un brazo robótico ! ¡Es genial! Entonces, sin más preámbulos, ¡comencemos!
Referencia 1 en esta serie.
Introducción a Arduino
Arduino no se refiere específicamente a una microcomputadora de un solo chip ni a un entorno de desarrollo , sino que en realidad se refiere a todo el ecosistema , desde el software hasta el hardware .
Arduino se desarrolla en base a Arduino IDE , la capa inferior es lenguaje C y C ++ , y el hardware y el código son de código abierto . Tiene las características de ecología rica y multiplataforma .

placa de desarrollo arduino

Las placas de desarrollo comunes para Arduino incluyen Arduino UNO , Arduino Nano , Arduino Mega 2560 , etc. Este artículo utiliza la placa de desarrollo del modelo Arduino UNO R3 , los parámetros importantes son los siguientes:
- Chip : microcontrolador ATmega328P basado en Atmel
- Oscilador de cristal : 16MHz
- E/S digital : 0 - 13 , señal digital de salida. El voltaje del nivel de salida del pin es de 5 V y la corriente de salida máxima es de 40 mA .
- PWM: 3, 5, 6, 9, 10, 11 con
~ - Puerto serie: 0, 1
- PWM: 3, 5, 6, 9, 10, 11 con
- E/S analógica: A0 - A5 , con canal de conversión analógico a analógico de 10 bits , que también es una ventaja de Arduino , con su propio ADC .
- Fuente de alimentación : salida de 3,3 V/5 V , la corriente máxima de salida es de 150 mA.
- Fuente de alimentación : se recomienda una fuente de alimentación de puerto de 12 V CC.
- Descargar : Programa de grabación
- USB : interfaz de descarga.
- ICSP : interfaz de descarga.
IDE de Arduino
Escriba programas en lenguaje C y al mismo tiempo tenga el pensamiento orientado a objetos de C++ . Dado que Arduino IDE tiene funciones de biblioteca enriquecidas y muchos módulos empaquetados, es muy fácil comenzar. La interfaz IDE es la siguiente:
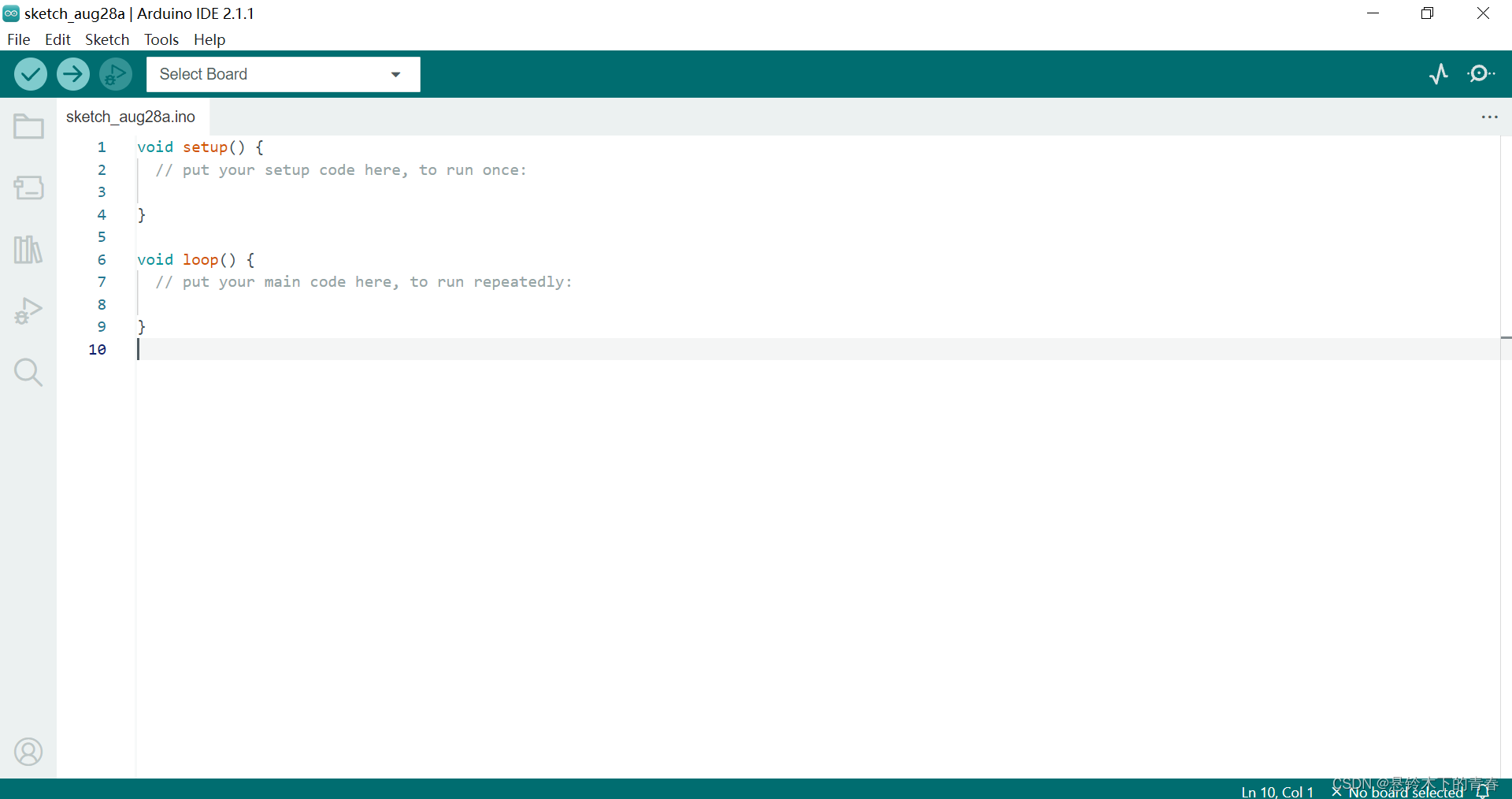
la interfaz es muy simple, con un clic en la esquina superior izquierda para compilar y cargar , y en la esquina superior derecha una herramienta de depuración de puerto serie .
Aquí está el enlace al sitio web oficial de Arduino IDE . La instalación de Arduino IDE no es el tema central de este artículo, por lo que no lo repetiré aquí.
Configurar la placa de desarrollo y los puertos.
Abra Arduino IDE y luego abra Herramientas - Placas de desarrollo - Placas Arduino AVR - Arduino Uno .
Antes de configurar el puerto , conecte la placa de desarrollo con un cable de datos USB y conéctela a la computadora . Abra Herramientas - Puertos - COMx a su vez . x es el número de puerto .
introducción de hardware
Introducción a los LED
Para obtener una introducción detallada al LED , consulte otro blog "51 MCU LED" . Debido a que la placa Arduino tiene una luz LED controlable (impresa en seda L), este artículo no necesita conectar un LED externo para controlarla directamente de manera lógica.
diagrama esquemático
Encuentre la serigrafía en la placa de desarrollo Arduino como LLPara el LEDde L ,de forma predeterminada, el ánodo está conectado al pin 13 del IO digital y el cátodo está conectado a tierra (por supuesto, la placa pasa a través de una resistencia limitadora de corriente). Es decir,Sólo necesitamos controlar el nivel del pin 13 para controlar el encendido y apagado del LED .
Implementación de software
Los programas en Arduino IDE se pueden escribir en C/C++ .
Introducción a las funciones de la biblioteca.
Primero, se presentan las funciones de las tres bibliotecas principales . Vaya al manual de funciones oficial para obtener más detalles .
- Inicialización de entrada de salida de pin
void pinMode(uint8_t pin, uint8_t mode)- pin : número de pin
- modo : modo pin
- Salida: SALIDA
- Entrada: ENTRADA SALIDA
- Pull-up de entrada: INPUT_PULLUP
- escritura de pin digital
void digitalWrite(uint8_t pin, uint8_t val)- pin : número de pin
- val : nivel alto o bajo
- Nivel bajo: BAJO
- Nivel alto: ALTO
- función de retardo
void delay(unsigned long ms)- ms : retraso en milisegundos
código
// 2022.11.12
// Author:Qiu
#define LED_L 13 // 引脚号
#define SPEED 1000 // 控制闪烁间隔1000ms
// 参数初始化,仅执行一次
void setup() {
// 初始化数字引脚13作为输出
pinMode(LED_L, OUTPUT);
}
// 主循环
void loop() {
digitalWrite(LED_L, HIGH); // 向13引脚写入高电平
delay(SPEED); // 等待
digitalWrite(LED_L, LOW); // 向13引脚写入低电平
delay(SPEED); // 等待
}
Después de que la compilación sea exitosa, cárguelo en el tablero. El fenómeno experimental es que la luz LED parpadea a una frecuencia de 1 Hz.
Por supuesto, la misma implementación se puede encontrar en los ejemplos que vienen con Arduino , la ruta es:Documentación - Ejemplos - Conceptos básicos - Blink. Le sugiero que pueda implementarlo usted mismo primero . Después de todo, involucraremos aplicaciones más complejas más adelante y los ejemplos por sí solos no pueden satisfacer nuestras necesidades.
Objetivo del próximo artículo
Esperamos controlar las luces LED de una manera más avanzada , por ejemplo, agregar uninterruptor físico. ¡Hasta la próxima!
Resumir
A lo largo de este capítulo, ha aprendido cómo controlar el puerto IO digital para generar niveles altos y bajos y ha completado el experimento de parpadeo del LED con la ayuda de la función de retardo .Esto es tan importante que será la luz indicadora de nuestros futuros brazos robóticos . ¡Por favor, no tomes este pequeño primer paso a la ligera!
Estación B: Tai Chi Maker ↩︎