Experimento de la serie de desarrollo de algoritmos de capa inferior de control de vuelo multirotor | Experimento 1 de diseño de sistema de potencia multirotor
01
Introducción al sistema de propulsión multirrotor.
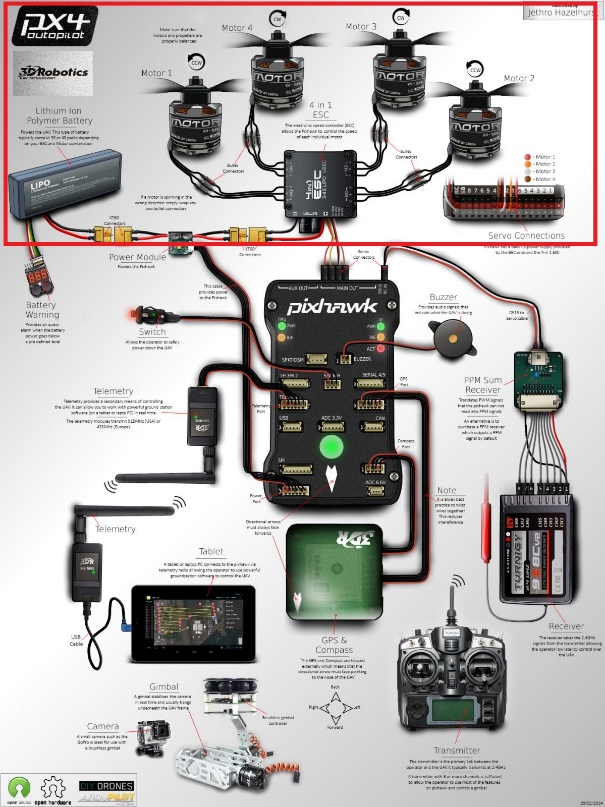
El sistema de energía de un UAV multirrotor generalmente incluye hélices, motores, ESC y baterías. El sistema de energía es la parte más importante del multirotor, que determina el rendimiento principal del multirotor, como el tiempo de vuelo estacionario, la capacidad de carga, la velocidad de vuelo y la distancia de vuelo. Los componentes del sistema de energía deben coincidir y ser compatibles entre sí; de lo contrario, es posible que no funcionen correctamente e incluso fallen repentinamente y causen accidentes en algunos casos extremos. Por ejemplo, bajo ciertas condiciones, una operación excesiva del controlador de vuelo puede hacer que la corriente ESC supere su umbral de seguridad y provocar que el motor se detenga, lo cual es muy peligroso durante el vuelo. La hélice, el motor, el ESC y la batería se presentan por separado a continuación.
02
Introducción de componentes principales.
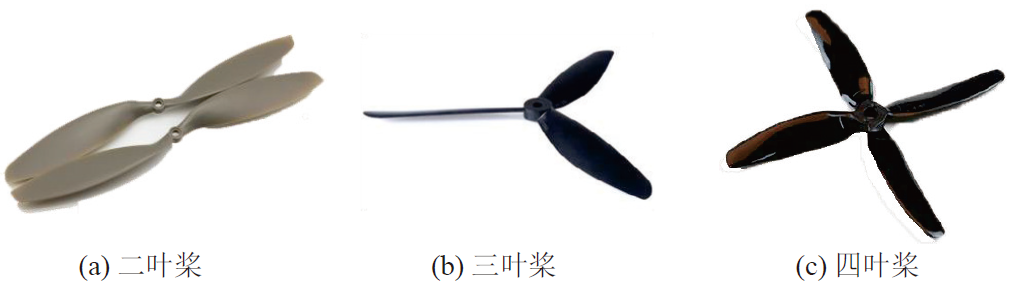
Hélice: una hélice es un componente que genera directamente las fuerzas y momentos necesarios para el movimiento multirotor.
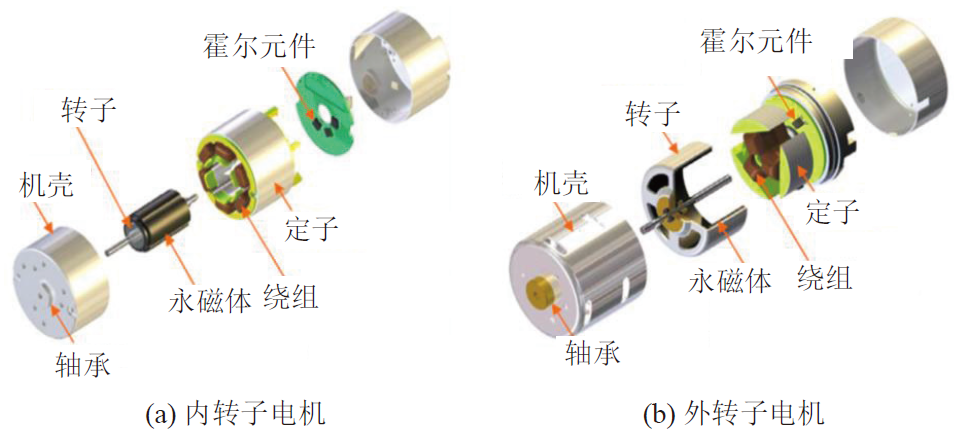
Motor: debido a que los motores de CC sin escobillas tienen muchas ventajas, como alta eficiencia, facilidad de miniaturización y bajo costo de fabricación, los motores de CC sin escobillas son los principales motores utilizados para multirrotores. La función principal del motor sin escobillas es convertir la energía eléctrica almacenada en la batería en energía mecánica que hace girar las aspas. Según la posición del rotor, los motores de CC sin escobillas se pueden dividir en motores de rotor exterior y motores de rotor interior. Los motores de rotor exterior pueden proporcionar un par mayor que los motores de rotor interior, por lo que es más fácil impulsar hélices grandes con mayor eficiencia. Además, la velocidad del motor de rotor externo también es más estable, por lo que es más adecuado para aviones multirotor y de otro tipo.
ESC: La función básica del ESC es controlar la velocidad del motor según la señal PWM transmitida por el piloto automático. Dado que la señal PWM emitida por el piloto automático es muy débil y no puede accionar directamente el motor de CC sin escobillas, se requiere que el ESC procese y amplifique la señal para accionar el motor. Además, algunos ESC también se pueden utilizar como freno o fuente de alimentación regulada (módulo de circuito sin batería) para suministrar energía al receptor del control remoto y al mecanismo de dirección. A diferencia de los ESC ordinarios, los ESC sin escobillas pueden actuar como un conmutador para convertir la energía CC del multirotor en energía trifásica que pueden utilizar los motores CC sin escobillas. Por supuesto, también tiene otras funciones, como protección de la batería y protección de inicio.

Baterías: Las baterías se utilizan principalmente para proporcionar energía.

03
Radio del rotor y del marco
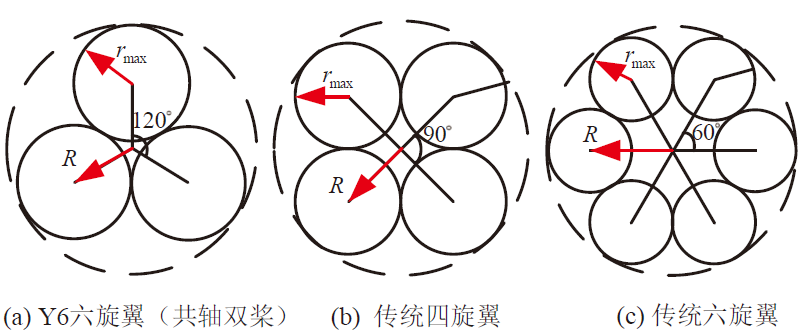
El tamaño del multirrotor está estrechamente relacionado con el número de brazos y el tamaño de las palas. Si se utiliza el ángulo entre los brazos para expresar, el tipo Y6 de seis rotores de tres ejes = 120°; el de cuatro rotores convencional = 90°; el de seis rotores convencional = 60°. Suponiendo que el número de brazos es n, hay = 360 ° / n. En este momento, existe la siguiente relación entre el radio R del marco y el radio máximo del rotor:
04
Multicóptero basado en el sitio web de evaluación de vuelo
Configuración y uso del sistema de energía.
Conocido: a una altitud de 0 m, temperatura 25 ◦C, utilizando el sitio web para adaptar un tres rotores, tres ejes, seis rotores, cuatro rotores, seis rotores, cuatro ejes ocho rotores y ocho rotores cada uno con un tiempo de vuelo de más de 10 minutos y, según el sitio web de evaluación de vuelos multirrotor https://flyeval.com/paper/, enumera todos los parámetros de vuelo y los parámetros básicos de rendimiento de vuelo de la aeronave.
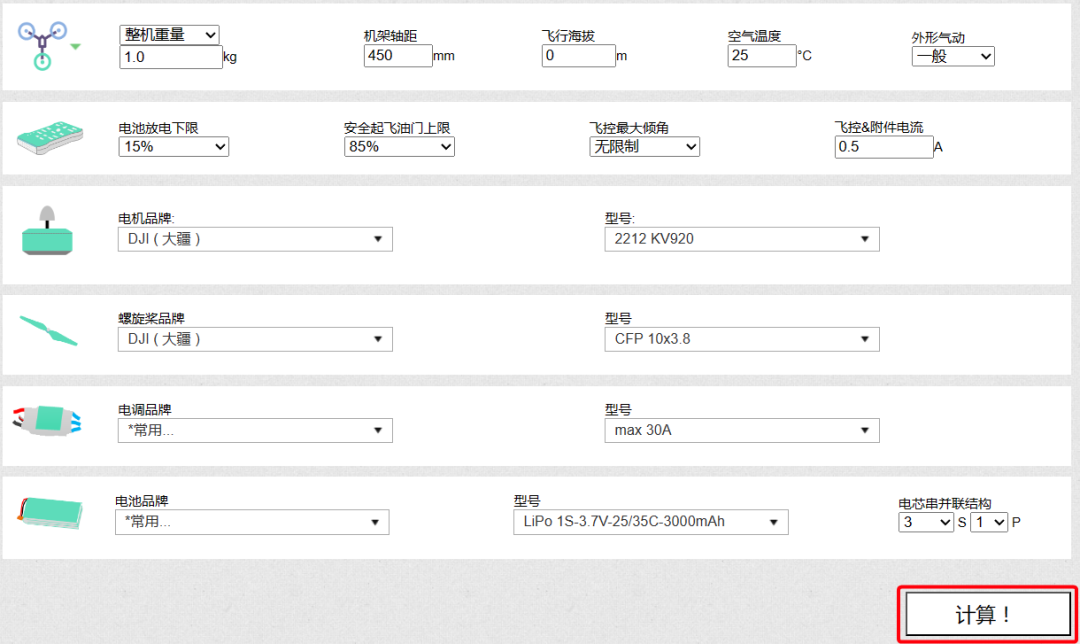
Solución: ①Configure un trirotor, establezca el "peso de la máquina" en 1,0 kg, la "distancia entre ejes del bastidor" en 450 mm, la "altitud de vuelo" en 0 m, la "temperatura del aire" en 25 °C y la "forma aerodinámica". Seleccione el valor predeterminado de "Normal". ". La segunda fila de parámetros está configurada con el valor predeterminado: "límite inferior de descarga de la batería" (la capacidad restante de la batería, para evitar que la batería se descargue excesivamente) está configurada en 15%, "límite superior del acelerador de despegue seguro" (para garantizar que haya suficiente para el control de altitud básico del vuelo multirotor) Capacidad de la batería de empuje) está configurada en 85%, "Ángulo de inclinación máximo del controlador de vuelo" está configurada en "Ilimitado", "Corriente del controlador de vuelo y accesorios" está configurada establecido en 0,5A.
②Establezca la "marca del motor" en "DJI (Dajiang)" y su modelo en "2212*KV920"; la "marca de la hélice" en "DJI CFP10*3.8" (significa que el diámetro Dp = 10 pulgadas, el paso Hp = 3: 8 pulgadas, el número de cuchillas Bp = 2); "Marca de ajuste eléctrico" está configurada en "Common max 30A" (significa que la corriente máxima es IeMax =30A, y es un ESC comúnmente utilizado en el mercado); en Al mismo tiempo, "Marca de batería" está configurada en "Común 1S-3.7V-25/35C-3000mAh3S1P". Los parámetros detallados de la batería seleccionada son los siguientes: el voltaje total Ub es 1 S 3 = 3 S = 3 3:7V = 11:1V, la capacidad de la batería es Cb =3000mAh y la tasa de descarga máxima es Kb =25C, lo que significa que la corriente máxima de descarga es Kb Cb t 75A. Otros parámetros, incluido el peso y la resistencia de cada componente, son los mismos que los valores predeterminados del sitio web de evaluación de rotores múltiples https://flyeval.com/paper/.
③Haga clic en el botón "¡Calcular!" para obtener los parámetros de vuelo y el rendimiento de la aeronave. Como se muestra en la Figura 5.18, en la columna de "rendimiento de vuelo estacionario", el "tiempo de vuelo estacionario" obtenido es 14,7 min y el "porcentaje de aceleración" es 54,2%; en la columna de "rendimiento máximo de aceleración", la "elevación total obtenida " es 26N y la "potencia de salida del motor" es 134,4W.

De acuerdo con el método anterior, etc., se puede calcular el sistema de potencia de tres ejes, seis rotores, cuatro rotores, seis rotores, cuatro ejes, ocho rotores y ocho rotores.