El código fuente oficial de Segformer se basa en el marco MMCV, con muchos paquetes generales, que no son fáciles de leer y aprender por mí mismo. Aquí estoy usando la versión de Segformer reproducida por el github de Bubbliiiiing.
Enlace de descarga del código del jefe burbujeante:
https://github.com/bubbliiing/segformer-pytorch
El código del hermano mayor es excelente y conciso, y los comentarios también son muy detallados. El formato del conjunto de datos VOC se utiliza en el código, por lo que solo es necesario modificar el formato de datos del paisaje urbano.
Tabla de contenido
1. Estructura del modelo Segformer
Funciones de Segformer : transformador + fusión de funciones + MLP liviano + selección de convolución 3 * 3 y codificación de posición de descarte

1.Módulo OverlapPatchEmbed
Segmenta la imagen de entrada, divide la imagen de entrada en parches de tamaño patch_size usando una operación de convolución y cambia los parches usando un paso de paso para crear parches superpuestos. Luego, cada bloque se vectoriza y normaliza 1D mediante una capa de normalización. La salida de este módulo contiene un tensor de forma (B, N, C), donde B es el tamaño del lote, N es el número de píxeles en cada bloque y C es la dimensión de incrustación. Además, el módulo devuelve HW, que es el tamaño de la imagen de entrada, ya que es necesario conocer el tamaño de la imagen original al decodificar.
class OverlapPatchEmbed(nn.Module):
def __init__(self, patch_size=7, stride=4, in_chans=3, embed_dim=768):
super().__init__()
patch_size = (patch_size, patch_size) #7*7
self.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size, stride=stride,
padding=(patch_size[0] // 2, patch_size[1] // 2))
self.norm = nn.LayerNorm(embed_dim)
self.apply(self._init_weights)
def forward(self, x):
x = self.proj(x)
_, _, H, W = x.shape
x = x.flatten(2).transpose(1, 2)
x = self.norm(x)
return x, H, W
2. Módulo de Autoatención
Con respecto al principio de autoatención , puedes leer el artículo de este gran tipo, que es muy detallado: https://zhuanlan.zhihu.com/p/410776234
El núcleo es esta fórmula:  se han realizado algunas mejoras en Segformer.
se han realizado algunas mejoras en Segformer.
class Attention(nn.Module):
def __init__(self, dim, num_heads=8, qkv_bias=False, qk_scale=None, attn_drop=0., proj_drop=0., sr_ratio=1):
super().__init__()
assert dim % num_heads == 0, f"dim {
dim} should be divided by num_heads {
num_heads}."
self.dim = dim
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
self.q = nn.Linear(dim, dim, bias=qkv_bias)
self.sr_ratio = sr_ratio
if sr_ratio > 1:
self.sr = nn.Conv2d(dim, dim, kernel_size=sr_ratio, stride=sr_ratio)
self.norm = nn.LayerNorm(dim)
self.kv = nn.Linear(dim, dim * 2, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop)
self.apply(self._init_weights)
def forward(self, x, H, W):
B, N, C = x.shape
# bs, 16384, 32 => bs, 16384, 32 => bs, 16384, 8, 4 => bs, 8, 16384, 4
q = self.q(x).reshape(B, N, self.num_heads, C // self.num_heads).permute(0, 2, 1, 3)
if self.sr_ratio > 1:
# bs, 16384, 32 => bs, 32, 128, 128
x_ = x.permute(0, 2, 1).reshape(B, C, H, W)
# bs, 32, 128, 128 => bs, 32, 16, 16 => bs, 256, 32
x_ = self.sr(x_).reshape(B, C, -1).permute(0, 2, 1)
x_ = self.norm(x_)
# bs, 256, 32 => bs, 256, 64 => bs, 256, 2, 8, 4 => 2, bs, 8, 256, 4
kv = self.kv(x_).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
else:
kv = self.kv(x).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
k, v = kv[0], kv[1]
# bs, 8, 16384, 4 @ bs, 8, 4, 256 => bs, 8, 16384, 256
attn = (q @ k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
# bs, 8, 16384, 256 @ bs, 8, 256, 4 => bs, 8, 16384, 4 => bs, 16384, 32
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
# bs, 16384, 32 => bs, 16384, 32
x = self.proj(x)
x = self.proj_drop(x)
return x
3.Módulo MixFFN

A diferencia de VIT, segformer descarta la codificación posicional y utiliza convolución 3x3 para construir un módulo MixFFN.
class Mlp(nn.Module):
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.dwconv = DWConv(hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
self.apply(self._init_weights)
def forward(self, x, H, W):
x = self.fc1(x)
x = self.dwconv(x, H, W)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
4. Fusión de empalme y decodificación MLP
Esta parte es para empalmar las anteriores y generarlas.
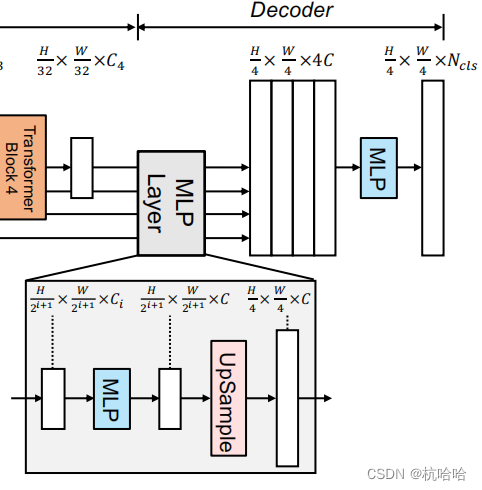
def forward(self, inputs):
c1, c2, c3, c4 = inputs
############## MLP decoder on C1-C4 ###########
n, _, h, w = c4.shape
_c4 = self.linear_c4(c4).permute(0,2,1).reshape(n, -1, c4.shape[2], c4.shape[3])
_c4 = F.interpolate(_c4, size=c1.size()[2:], mode='bilinear', align_corners=False)
_c3 = self.linear_c3(c3).permute(0,2,1).reshape(n, -1, c3.shape[2], c3.shape[3])
_c3 = F.interpolate(_c3, size=c1.size()[2:], mode='bilinear', align_corners=False)
_c2 = self.linear_c2(c2).permute(0,2,1).reshape(n, -1, c2.shape[2], c2.shape[3])
_c2 = F.interpolate(_c2, size=c1.size()[2:], mode='bilinear', align_corners=False)
_c1 = self.linear_c1(c1).permute(0,2,1).reshape(n, -1, c1.shape[2], c1.shape[3])
_c = self.linear_fuse(torch.cat([_c4, _c3, _c2, _c1], dim=1))
x = self.dropout(_c)
x = self.linear_pred(x)
return x
Dos, modificación del código de paisajes urbanos.
1. Formato de carpeta del conjunto de datos
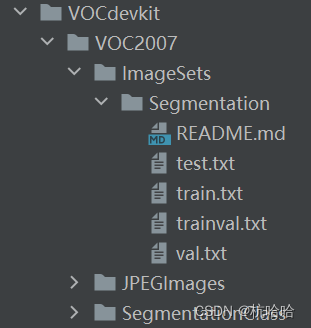
Aquí, la imagen de etiqueta del conjunto de datos debe ser una imagen en escala de grises o una imagen en color de ocho bits, y el valor de cada píxel de la etiqueta es el tipo al que pertenece el píxel. Por lo tanto, utilice la etiqueta _labelIds.png
en las pocas etiquetas de paisajes urbanos .
División del conjunto de datos Modifique el archivo voc_annotation.py según sus propias necesidades
2. Modifique el archivo dataloader.py
Las categorías originales en esta etiqueta son de 0 a 33 y -1, e hice 19 segmentaciones de categorías. Modifique el archivo dataloader.py :
Copié directamente el contenido de encode_target que usé antes y lo agregué:
CityscapesClass = namedtuple('CityscapesClass', ['name', 'id', 'train_id', 'category', 'category_id',
'has_instances', 'ignore_in_eval', 'color'])
classes = [
CityscapesClass('unlabeled', 0, 19, 'void', 0, False, True, (0, 0, 0)),
CityscapesClass('ego vehicle', 1, 19, 'void', 0, False, True, (0, 0, 0)),
CityscapesClass('rectification border', 2, 19, 'void', 0, False, True, (0, 0, 0)),
CityscapesClass('out of roi', 3, 19, 'void', 0, False, True, (0, 0, 0)),
CityscapesClass('static', 4, 19, 'void', 0, False, True, (0, 0, 0)),
CityscapesClass('dynamic', 5, 19, 'void', 0, False, True, (111, 74, 0)),
CityscapesClass('ground', 6, 19, 'void', 0, False, True, (81, 0, 81)),
CityscapesClass('road', 7, 0, 'flat', 1, False, False, (128, 64, 128)),
CityscapesClass('sidewalk', 8, 1, 'flat', 1, False, False, (244, 35, 232)),
CityscapesClass('parking', 9, 19, 'flat', 1, False, True, (250, 170, 160)),
CityscapesClass('rail track', 10, 19, 'flat', 1, False, True, (230, 150, 140)),
CityscapesClass('building', 11, 2, 'construction', 2, False, False, (70, 70, 70)),
CityscapesClass('wall', 12, 3, 'construction', 2, False, False, (102, 102, 156)),
CityscapesClass('fence', 13, 4, 'construction', 2, False, False, (190, 153, 153)),
CityscapesClass('guard rail', 14, 19, 'construction', 2, False, True, (180, 165, 180)),
CityscapesClass('bridge', 15, 19, 'construction', 2, False, True, (150, 100, 100)),
CityscapesClass('tunnel', 16, 19, 'construction', 2, False, True, (150, 120, 90)),
CityscapesClass('pole', 17, 5, 'object', 3, False, False, (153, 153, 153)),
CityscapesClass('polegroup', 18, 19, 'object', 3, False, True, (153, 153, 153)),
CityscapesClass('traffic light', 19, 6, 'object', 3, False, False, (250, 170, 30)),
CityscapesClass('traffic sign', 20, 7, 'object', 3, False, False, (220, 220, 0)),
CityscapesClass('vegetation', 21, 8, 'nature', 4, False, False, (107, 142, 35)),
CityscapesClass('terrain', 22, 9, 'nature', 4, False, False, (152, 251, 152)),
CityscapesClass('sky', 23, 10, 'sky', 5, False, False, (70, 130, 180)),
CityscapesClass('person', 24, 11, 'human', 6, True, False, (220, 20, 60)),
CityscapesClass('rider', 25, 12, 'human', 6, True, False, (255, 0, 0)),
CityscapesClass('car', 26, 13, 'vehicle', 7, True, False, (0, 0, 142)),
CityscapesClass('truck', 27, 14, 'vehicle', 7, True, False, (0, 0, 70)),
CityscapesClass('bus', 28, 15, 'vehicle', 7, True, False, (0, 60, 100)),
CityscapesClass('caravan', 29, 19, 'vehicle', 7, True, True, (0, 0, 90)),
CityscapesClass('trailer', 30, 19, 'vehicle', 7, True, True, (0, 0, 110)),
CityscapesClass('train', 31, 16, 'vehicle', 7, True, False, (0, 80, 100)),
CityscapesClass('motorcycle', 32, 17, 'vehicle', 7, True, False, (0, 0, 230)),
CityscapesClass('bicycle', 33, 18, 'vehicle', 7, True, False, (119, 11, 32)),
CityscapesClass('license plate', -1, 19, 'vehicle', 7, False, True, (0, 0, 142)),
]
id_to_train_id = np.array([c.train_id for c in classes])
def encode_target(cls, png):
return cls.id_to_train_id[np.array(png)]
Al mismo tiempo, modifique la función def getitem (self, index ):
modifique la división, la etiqueta voc original es la misma que el nombre de la imagen, agregue un nombre_imagen y luego agregue un png = self.encode_target (png)
def __getitem__(self, index):
annotation_line = self.annotation_lines[index]
name = annotation_line.split()[0]
#-------------------------------#
# 从文件中读取图像
#-------------------------------#
image_name = annotation_line.split('_gtFine_labelIds')[0] + '_leftImg8bit'
jpg = Image.open(os.path.join(os.path.join(self.dataset_path, "VOC2007/JPEGImages"), image_name + ".png"))
#jpg = Image.open(os.path.join(os.path.join(self.dataset_path, "VOC2007/JPEGImages"), name + ".png"))
png = Image.open(os.path.join(os.path.join(self.dataset_path, "VOC2007/SegmentationClass"), name + ".png"))
#-------------------------------#
# 数据增强
#-------------------------------#
jpg, png = self.get_random_data(jpg, png, self.input_shape, random = self.train)
jpg = np.transpose(preprocess_input(np.array(jpg, np.float64)), [2,0,1])
png = np.array(png)
png = self.encode_target(png)
#png[png >= self.num_classes] = self.num_classes
#-------------------------------------------------------#
# 转化成one_hot的形式
# 在这里需要+1是因为voc数据集有些标签具有白边部分
# 我们需要将白边部分进行忽略,+1的目的是方便忽略。
#-------------------------------------------------------#
seg_labels = np.eye(self.num_classes + 1)[png.reshape([-1])]
seg_labels = seg_labels.reshape((int(self.input_shape[0]), int(self.input_shape[1]), self.num_classes + 1))
return jpg, png, seg_labels
3. Obtenga el mapa de predicción RGB
La imagen generada en el archivo get_miou.py es una imagen en escala de grises y lo que ves es una imagen aproximadamente completamente negra. Si desea predecir una imagen RGB, convierta la categoría de cada píxel en el resultado de la predicción a un valor de color RGB. Por lo tanto, se escribe otra función de mapeo: al definir una tabla de mapeo de colores, cada categoría se asigna a un valor de color RGB y se guarda la salida.
def CityscapesLABELtoRGB():
# 定义RGB颜色映射关系
color_map = {
0: [128, 64, 128],
1: [244, 35, 232],
2: [70, 70, 70],
3: [102, 102, 156],
4: [190, 153, 153],
5: [153, 153, 153],
6: [250, 170, 30],
7: [220, 220, 0],
8: [107, 142, 35],
9: [152, 251, 152],
10: [70, 130, 180],
11: [220, 20, 60],
12: [255, 0, 0],
13: [0, 0, 142],
14: [0, 0, 70],
15: [0, 60, 100],
16: [0, 80, 100],
17: [0, 0, 230],
18: [119, 11, 32],
19: [0, 0, 0]
}
# 加载类别标签图像
label_path = "miou_out/detection-results"
rgb_folder_path = "RGB"
for file_name in os.listdir(label_path):
# 加载类别标签图像
rgb_path = os.path.join(label_path, file_name)
img = Image.open(rgb_path)
label_arr = np.array(img)
# 将类别标签转换为RGB标签
rgb_arr = np.zeros((label_arr.shape[0], label_arr.shape[1], 3), dtype=np.uint8)
for key, value in color_map.items():
rgb_arr[label_arr == key] = value
# 将RGB标签保存为PNG图像
rgb_path = os.path.join(rgb_folder_path, os.path.splitext(file_name)[0] + ".png")
label_img = Image.fromarray(rgb_arr)
label_img.save(rgb_path, "PNG", quality=100, bitdepth=8)