Tabla de contenido
1. La relación posicional relativa de los segmentos de línea y el principio del producto cruzado
2. Juicio de relación posicional
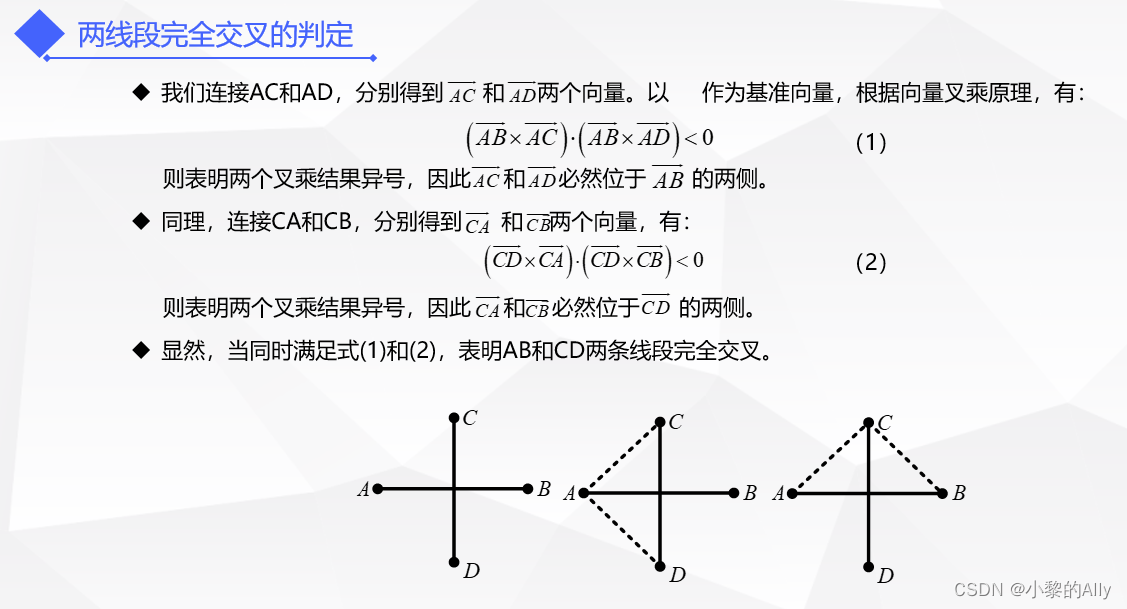
1. Juicio de intersección completa de dos segmentos de recta.
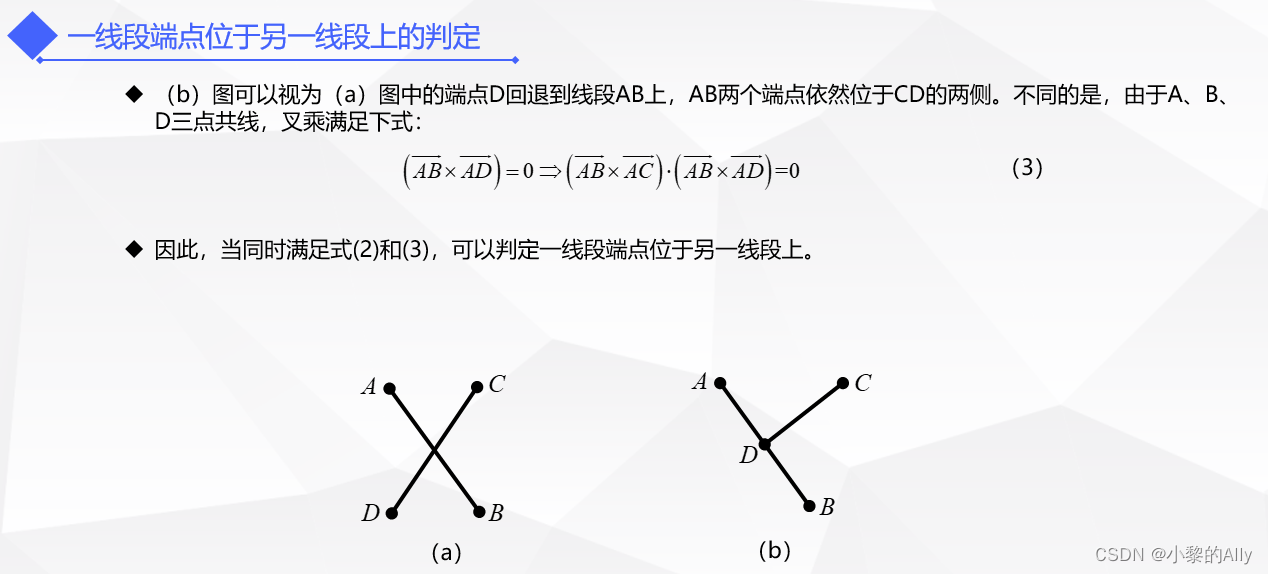
2. Juicio de que el punto final de un segmento está ubicado en otro segmento
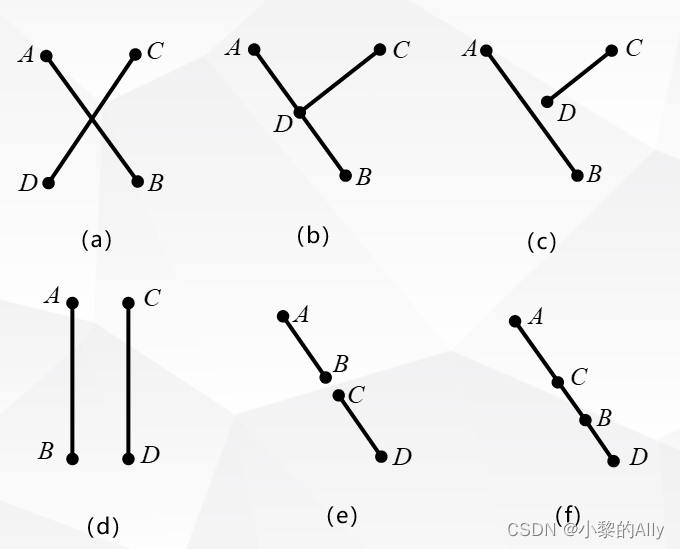
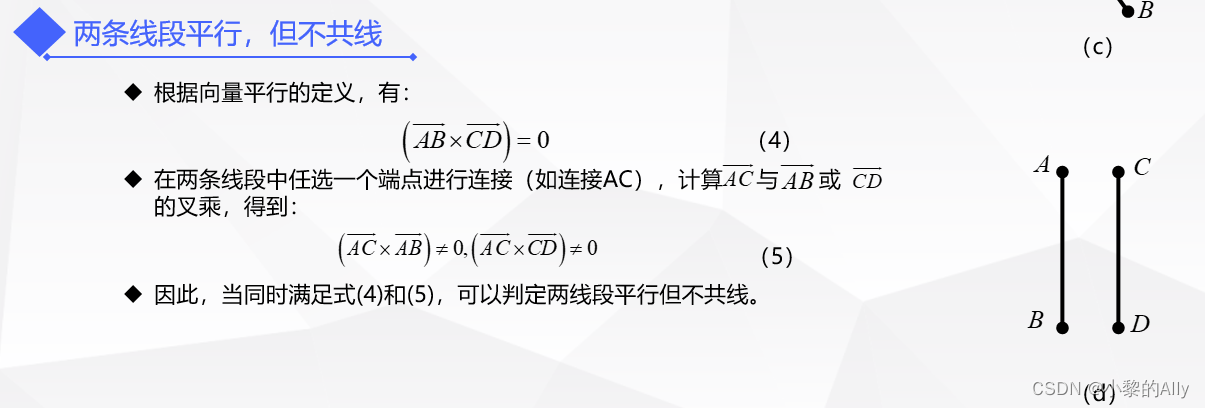
4. Dos segmentos de recta son paralelos pero no colineales.
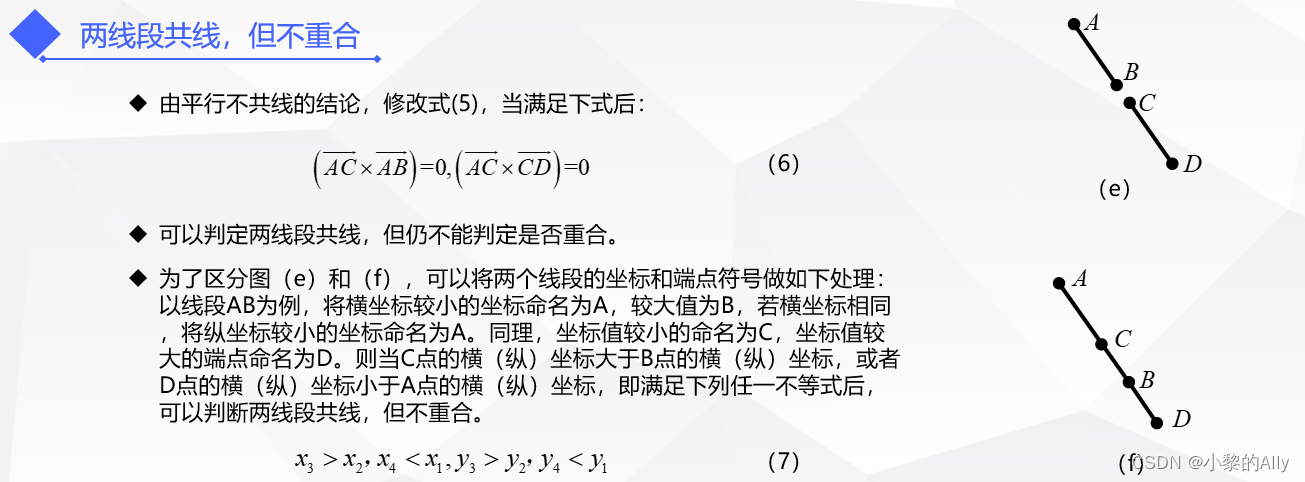
5. Dos segmentos de recta son colineales, pero no coincidentes.
6. Dos segmentos de recta son colineales y coincidentes.
prefacio
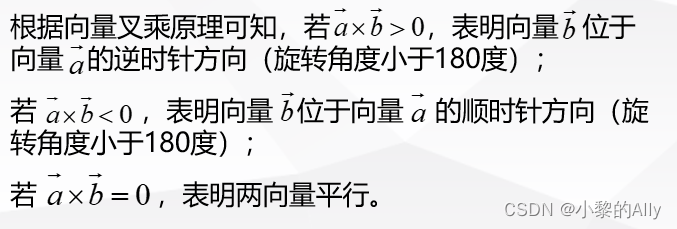
1. La relación posicional relativa de los segmentos de línea y el principio del producto cruzado
Primero dé la relación posicional común de dos segmentos de línea del plano:
2. Juicio de relación posicional
1. Juicio de intersección completa de dos segmentos de recta.
2. Juicio de que el punto final de un segmento está ubicado en otro segmento

4. Dos segmentos de recta son paralelos pero no colineales.
5. Dos segmentos de recta son colineales, pero no coincidentes.
6. Dos segmentos de recta son colineales y coincidentes.
3. Ejemplo de simulación
Al construir 6 segmentos de línea y un lado de un polígono, examinamos si se cruza. El diagrama esquemático es el siguiente:
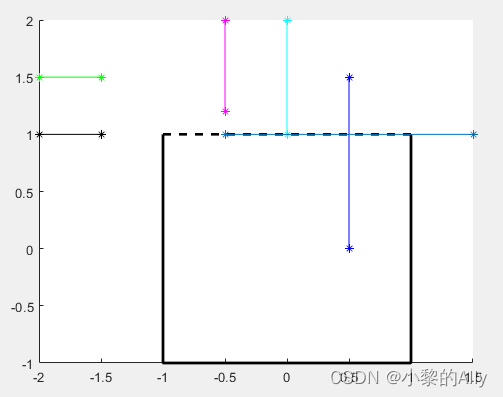
El código de simulación de muestra es el siguiente:
clc
clear
close all
%% 主程序
% 多边形及线段
poly = [-1,1; 1,1; 1,-1; -1,-1;-1,1];
line1 = [0.5,0; 0.5,1.5];
line2 = [0,2; 0,1];
line3 = [-0.5,1.2; -0.5,2];
line4 = [-2 1.5; -1.5,1.5];
line5 = [-2 1; -1.5,1];
line6 = [-0.5 1; 1.5,1];
% 画图
figure
hold on
plot(poly(2:end,1), poly(2:end,2),'k','linewidth',2);
plot(poly(1:2,1), poly(1:2,2),'k--','linewidth',2);
plot(line1(:,1), line1(:,2),'b-*');
plot(line2(:,1), line2(:,2),'c-*');
plot(line3(:,1), line3(:,2),'m-*');
plot(line4(:,1), line4(:,2),'g-*');
plot(line5(:,1), line5(:,2),'k-*');
plot(line6(:,1), line6(:,2),'-*');
% 调用碰撞检测函数
poly_temp = poly(1:2,:);
is_intersect1 = intersect_check(line1,poly_temp);
is_intersect2 = intersect_check(line2,poly_temp);
is_intersect3 = intersect_check(line3,poly_temp);
is_intersect4 = intersect_check(line4,poly_temp);
is_intersect5 = intersect_check(line5,poly_temp);
is_intersect6 = intersect_check(line6,poly_temp);
%% 函数
% 碰撞检测
function is_intersect = intersect_check(line,poly)
[A,B] = sortPoint(line);
ployPointNum = size(poly,1);
is_intersect = false;
for i = 1:ployPointNum-1
line_temp = poly(i:i+1,:);
[C,D] = sortPoint(line_temp);
% 1-检测线段CD的两个端点是否位于线段AB两边
AB = B - A;
AC = C - A;
AD = D - A;
result1 = AB(1) * AC(2) - AB(2) * AC(1);
result2 = AB(1) * AD(2) - AB(2) * AD(1);
% 2-检测线段AB的两个端点是否位于线段CD两边
CD = D - C;
CA = A - C;
CB = B - C;
result3 = CD(1) * CA(2) - CD(2) * CA(1);
result4 = CD(1) * CB(2) - CD(2) * CB(1);
% 3-判断两条线段是否相交
if result1 * result2 < 0 && result3 * result4 < 0 || ...
result1 * result2 == 0 && result3 * result4 < 0 ||...
result1 * result2 < 0 && result3 * result4 == 0
% 若两条线为X形,或者一个端点在另一个线段上(T形),则相交
is_intersect = true;
break
elseif result1 == 0 && result2 == 0 && result3 == 0 && result4 == 0
% 4个都为0,表明两条线段共线,但是否重合需进一步判断
% 由于线段端点已经排序,只需要排除共线但不重合的情况即可
if ~(C(1) > B(1) || D(1) < A(1) || ... % X方向
C(2) > B(2) || D(2) < A(2)) % Y方向
is_intersect = true;
break
end
end
end
end
% 对线段的两个端点排序
function [A,B] = sortPoint(line)
A = line(1,:);
B = line(2,:);
% 将线段的端点按照大小排列
if line(1,1) < line(2,1)
A = line(1,:);
B = line(2,:);
elseif line(1,1) > line(2,1)
A = line(2,:);
B = line(1,:);
else
if line(1,2) < line(2,2)
A = line(1,:);
B = line(2,:);
elseif line(1,2) > line(2,2)
A = line(2,:);
B = line(1,:);
end
end
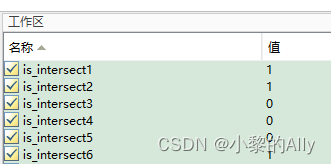
endDespués de ejecutar, se obtienen los siguientes resultados: 1 significa intersección y 0 significa disjunto.