실내 포지셔닝 시스템 솔루션에서 UWB 포지셔닝 기술은 현재 널리 사용되며 UWB 포지셔닝에서 10-30cm의 초고도 포지셔닝 정확도를 활용합니다. 현재 UWB TDOA 포지셔닝 시스템의 포지셔닝 차원은 다양한 사용 시나리오에 따라 0차원 포지셔닝(존재 감지), 1차원 포지셔닝, 2차원 포지셔닝 및 3차원 포지셔닝의 네 가지 유형으로 나뉩니다. .다음 4개의 위치 결정 치수의 특성을 아래에 소개하고 적용합니다.

1. 0차원 실내 측위(존재감지)
0차원 실내 포지셔닝은 존재 감지에 자주 사용됩니다.일반적인 응용 시나리오는 사람이 오랫동안 방에 있는지 모니터링하는 것입니다.아래 그림과 같이 사람이 사라지고 떠날 때 알람이 발생합니다.

0D 실내 포지셔닝
0차원 실내 측위 시스템의 하드웨어는 일반적으로 UWB 기지국과 UWB 태그만 있으면 실현할 수 있습니다.UWB 태그와 기지국은 서로 통신하고 상호 작용을 통해 사람 존재 모니터링 및 경보 기능을 실현합니다. 배경.
2. 1차원적 포지셔닝
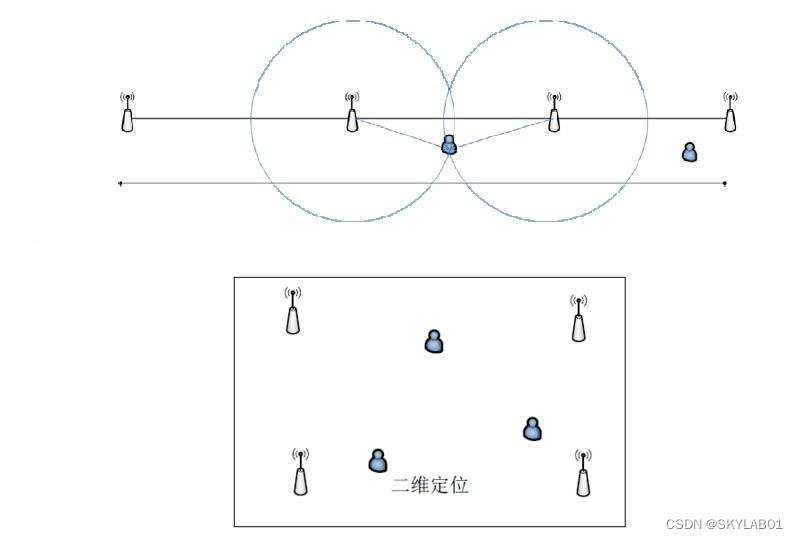
UWB 포지셔닝의 1차원 포지셔닝의 일반적인 응용 시나리오는 도로, 파이프 복도 및 터널과 같은 좁고 긴 포지셔닝 영역에서 사람, 물체 및 차량의 포지셔닝입니다. 아래 그림과 같이 이 도로의 대상입니다. 너비가 크지 않기 때문에 일반적으로 실내 측위를 할 때 도로의 너비는 무시됩니다.

1차원 포지셔닝
1차원 측위에서는 보통 터널의 방향에 따라 여러 개의 UWB 기지국을 배치하고 터널 모서리도 고려해야 합니다. 사각지대 없이 커버리지를 보장하려면 모서리에 더 많은 UWB 기지국을 배치해야 합니다.
이 모드에서는 UWB 기지국 시간 동기화를 통해 1차원 측위를 실현할 수 있습니다.
3. 2차원 포지셔닝
UWB 포지셔닝 시스템의 2차원 포지셔닝은 2차원 평면 포지셔닝으로 공간 평면에서 X 및 Y 좌표를 결정해야 합니다. 이 포지셔닝은 일반적으로 다음 두 가지 상황으로 나뉩니다.
1 도로와 유사한 의사 2차원 포지셔닝
1차원 포지셔닝과 유사하지만 대상 포지셔닝 기능을 구현하기 위해 UWB 범위를 사용합니다. 태그의 위치는 태그에서 UWB 기지국까지의 거리로 계산됩니다. 포지셔닝 장면의 특수성으로 인해 UWB 태그의 최종 위치를 계산할 수 있습니다.
2 표준 2차원 포지셔닝
3개 이상의 UWB 기지국을 통해 표준 2차원 평면에서 UWB 태그의 실시간 위치를 결정합니다. UWB 태그의 실시간 2차원 좌표를 측정할 수 있습니다.
3 "수직 투영"을 통한 2차원 포지셔닝
2차원 측위를 위한 UWB 측위 시스템에서는 2차원 좌표밖에 없기 때문에 "수직 투영"에 의한 오차에 주의할 필요가 있다. 아래 그림과 같이:
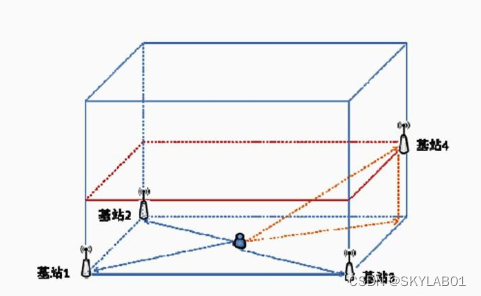
"수직 투영"을 사용한 2D 포지셔닝
위 그림에서 UWB 기지국 4는 다른 기지국과 같은 평면에 있지 않으며, 거리 측정을 하면 UWB 태그와 기지국 4의 빗변 사이의 거리를 구하게 되는데, 평면에 투영하는 원리를 통한 포지셔닝 알고리즘.
4. 3차원 포지셔닝
대상의 3차원 측위를 위해 UWB 포지셔닝 시스템을 사용하려면 아래 그림과 같이 대상의 XYZ 3차원 좌표를 얻어야 합니다.
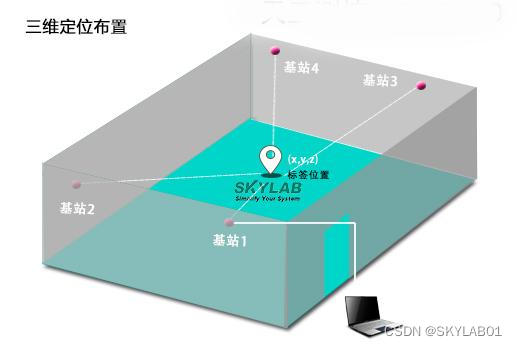
3D 포지셔닝
기지국 배치: UWB 기지국을 세울 때 Z축 UWB 기지국의 높이 차이를 특별히 확장하여 Z축에 대한 정확도를 보장해야 합니다.
기지국 수: UWB 레인징을 사용하여 측위를 달성하는 경우 3차원 측위를 완료하는 데 3개의 UWB 기지국만 필요하며, TDOA 측위 알고리즘을 사용하는 경우 3차원 측위를 완료하는 데 4개 이상의 기지국이 필요합니다. 대상의.
위는 UWB 포지셔닝의 0D, 1D, 2D 및 3D 포지셔닝의 요약입니다.