Configuración y adquisición de función de parámetro común de cámara industrial robot Hikvision (lenguaje C)
- prefacio
- Árbol de propiedades de la cámara
-
- 1. Control de dispositivos/Control de dispositivos
- 2. Control de formato de cámara/ImageFormatControl
-
- 2.1 Obtener el ancho y alto máximo de la imagen de la cámara
- 2.2 Establecer el área ROI de la imagen de la cámara
- 2.3 Restaurar el área ROI de la imagen de la cámara y restaurar el valor máximo
- 2.4 Obtener el formato de imagen compatible con la cámara
- 2.5 Modificar el formato de imagen de la cámara
- 2.6 Activar/desactivar la imagen de prueba integrada de la cámara
- 2.7 Activar/desactivar la imagen de la cámara espejo X, espejo Y
- 2.8 Activar/desactivar la función de marca de agua de la imagen incrustada en la cámara
- 3. Control de Adquisición/Control de Adquisición
-
- 3.1 Configuración del modo de recopilación
- 3.2 Configuración de adquisición de múltiples fotogramas/AcquisitionBurstFrameCount
- 3.3 Control de velocidad de fotogramas/AdquisiciónFrameRate
- 3.4 Configuración del modo de disparo
- 3.5 Ajustes de exposición
- Cambio de ganancia de exposición múltiple 3.6 HDR
- 4. Control analógico/Control analógico
- 5. Control de E/S digital/Control de E/S digital
- 6. Control de Comando de Acción/Control de Acción
- 7. Control de acceso a archivos/Control de acceso a archivos
- 8. Supervisión de eventos/Control de eventos
- 9. Control de bloques de datos/ChunkDataControl
- 10. Control de capa de transporte / TransportLayerControl
- 11. Control de configuración de usuario/Control de configuración de usuario
prefacio
Este artículo presenta brevemente el método de configuración y el método de adquisición de los parámetros de uso común de las cámaras industriales
Hikvision Configuración
y Si no tiene prisa, simplemente lea primero los dos blogs anteriores y podrá familiarizarse más con la composición general. del sdk de cámara industrial de Hikvision. Hay demasiados parámetros y puede actualizarlos lentamente cuando tenga tiempo...
Árbol de propiedades de la cámara
1. Control de dispositivos/Control de dispositivos
1.1 Adquisición del número de serie de la cámara/DeviceSerialNumber
MVCC_STRINGVALUE stStrValue;
memset(&stStrValue, 0, sizeof(MVCC_STRINGVALUE));
nRet = MV_CC_GetStringValue(handle, "DeviceSerialNumber", &stStrValue);
if (MV_OK != nRet)
{
printf("Get DeviceSerialNumber fail! nRet [0x%x]\n", nRet);
}
printf("Current DeviceSerialNumber [%s]\n", stStrValue.chCurValue);
resultado:

1.2 Configuración y adquisición de nombres personalizados de la cámara/ID de usuario del dispositivo
nRet = MV_CC_SetStringValue(handle, "DeviceUserID", "UserIDChanged");
if (MV_OK != nRet)
{
printf("Set DeviceUserID fail! nRet [0x%x]\n", nRet);
}
MVCC_STRINGVALUE stStrValue;
memset(&stStrValue, 0, sizeof(MVCC_STRINGVALUE));
nRet = MV_CC_GetStringValue(handle, "DeviceUserID", &stStrValue);
if (MV_OK != nRet)
{
printf("Get DeviceUserID fail! nRet [0x%x]\n", nRet);
}
printf("Rename DeviceUserID [%s]\n", stStrValue.chCurValue);
resultado:

1.3 Adquisición del tiempo de encendido de la cámara/DeviceUptime
MVCC_INTVALUE_EX stIntValue = {
0};
nRet = MV_CC_GetIntValueEx(handle, "DeviceUptime", &stIntValue);
if (MV_OK != nRet)
{
printf("Get DeviceUptime fail! nRet [0x%x]\n", nRet);
}
printf("DeviceUptime [%d]\n", stIntValue.nCurValue);
resultado:

2. Control de formato de cámara/ImageFormatControl
2.1 Obtener el ancho y alto máximo de la imagen de la cámara
MVCC_INTVALUE_EX nWidthMaxValue= = {
0},nHeightMaxValue = {
0};
//如需获取当前相机图像宽高,需要将WidthMax替换成Width
nRet = MV_CC_GetIntValueEx(handle, "WidthMax", &nWidthMaxValue);
if (MV_OK != nRet)
{
printf("Get WidthMax fail! nRet [0x%x]\n", nRet);
}
//如需获取当前相机图像宽高,需要将HeightMax替换成Height
nRet = MV_CC_GetIntValueEx(handle, "HeightMax", &nHeightMaxValue);
if (MV_OK != nRet)
{
printf("Get HeightMax fail! nRet [0x%x]\n", nRet);
}
2.2 Establecer el área ROI de la imagen de la cámara
Nota: cuando la cámara establece el ancho y la altura de la imagen, la cámara no puede tomar la transmisión : debe configurarse antes de comenzar a capturar o después de detener la captura.
unsigned int m_Width=1000,m_Height=1000;//要设置的步进值
//offset,设置的偏移值,图像左上角为原点,一般需要是2的倍数,不能是奇数
unsigned int m_OffsetX=256,m_OffsetY=256;
//获取图像宽高最大最小值,获取步进值
MVCC_INTVALUE_EX nWidthValue= {
0},nHeightValue = {
0};
//获取相机支持的宽高最大值
nRet = MV_CC_GetIntValueEx(handle, "Width", &nWidthValue);
nRet = MV_CC_GetIntValueEx(handle, "Height", &nHeightValue);
if(m_Width>nWidthValue.nMax||
m_Height > nHeightValue.nMax||
m_Width<nWidthValue.nMin||
m_Height < nHeightValue.nMin||
(m_Width+m_OffsetX)>nWidthValue.nMax|| //偏移值+设置值必须小于宽高的最大值
(m_Height +m_OffsetY)>nHeightValue.nMax||)
{
//判断有没有超出范围,超出范围就报错!!!
printf("Set Image Width or Height out of range !!\n", nRet);
}else
{
//避免offset有偏移值,导致后续设置宽高失败
nRet = MV_CC_SetIntValue(handle,"OffsetX",0);
nRet = MV_CC_SetIntValue(handle,"OffsetY",0);
if((m_Width%nWidthValue.nInc)==0&&(m_Height%nHeightValue.nInc)==0)//符合步进值才设置进去
{
nRet = MV_CC_SetIntValue(handle,"Width",m_Width);
if(nRet != MV_OK)
{
printf("Warning: Set Width fail nRet [0x%x]!", nRet);
}
nRet = MV_CC_SetIntValue(handle,"Height",m_Height);
if(nRet != MV_OK)
{
printf("Warning: Set Height fail nRet [0x%x]!", nRet);
}
nRet = MV_CC_SetIntValue(handle,"OffsetX",m_OffsetX);
if(nRet != MV_OK)
{
printf("Warning: Set OffsetX fail nRet [0x%x]!", nRet);
}
nRet = MV_CC_SetIntValue(handle,"OffsetY",m_OffsetY);
if(nRet != MV_OK)
{
printf("Warning: Set OffsetY fail nRet [0x%x]!", nRet);
}
}else
{
//不符合步进,减去余数再去设置宽高,此时设置的宽高与原宽高有差异
nRet = MV_CC_SetIntValue(handle,"Width",m_Width-m_Width%nWidthValue.nInc);
if(nRet != MV_OK)
{
printf("Warning: Set Width fail nRet [0x%x]!", nRet);
}
nRet = MV_CC_SetIntValue(handle,"Height",m_Height-m_Height%nHeightValue.nInc);
if(nRet != MV_OK)
{
printf("Warning: Set Height fail nRet [0x%x]!", nRet);
}
nRet = MV_CC_SetIntValue(handle,"OffsetX",m_OffsetX);
if(nRet != MV_OK)
{
printf("Warning: Set OffsetX fail nRet [0x%x]!", nRet);
}
nRet = MV_CC_SetIntValue(handle,"OffsetY",m_OffsetY);
if(nRet != MV_OK)
{
printf("Warning: Set OffsetY fail nRet [0x%x]!", nRet);
}
}
}
2.3 Restaurar el área ROI de la imagen de la cámara y restaurar el valor máximo
MVCC_INTVALUE_EX nWidthMaxValue= {
0},nHeightMaxValue = {
0};
nRet = MV_CC_GetIntValueEx(handle, "WidthMax", &nWidthMaxValue);
if (MV_OK != nRet)
{
printf("Get WidthMax fail! nRet [0x%x]\n", nRet);
}
nRet = MV_CC_GetIntValueEx(handle, "HeightMax", &nHeightMaxValue);
if (MV_OK != nRet)
{
printf("Get HeightMax fail! nRet [0x%x]\n", nRet);
}
//一定要先还原相机的偏移值,再去设置相机宽高
nRet = MV_CC_SetIntValue(handle,"OffsetX",0);
nRet = MV_CC_SetIntValue(handle,"OffsetY",0);
nRet = MV_CC_SetIntValue(handle,"Width",nWidthMaxValue.nCurValue);//设置为最大值
if(nRet != MV_OK)
{
printf("Warning: Set Width fail nRet [0x%x]!", nRet);
}
nRet = MV_CC_SetIntValue(handle,"Height",nHeightMaxValue.nCurValue);//设置为最大值
if(nRet != MV_OK)
{
printf("Warning: Set Height fail nRet [0x%x]!", nRet);
}
2.4 Obtener el formato de imagen compatible con la cámara
MV_XML_NODE_FEATURE stNodeFeature;
MV_XML_FEATURE_Enumeration stFeatureEnm;
memset(&stNodeFeature,0,sizeof(MV_XML_NODE_FEATURE));
memset(&stFeatureEnm, 0, sizeof(MV_XML_FEATURE_Enumeration));
strncpy(stNodeFeature.strName, "PixelFormat", strlen("PixelFormat"));
stNodeFeature.enType = IFT_IEnumeration;
nRet = MV_XML_GetNodeFeature(handle,&stNodeFeature,&stFeatureEnm);
if (MV_OK != nRet)
{
return nRet;
}else
{
for (int i = 0; i < stFeatureEnm.nSymbolicNum; i++)
{
printf("PixelFormat:%s \r\n", stFeatureEnm.strSymbolic[i]);//打印出相机支持的所有像素格式
}
for (int i = 0; i < stFeatureEnm.nSymbolicNum; i++)
{
if (strcmp(stFeatureEnm.strSymbolic[i] ,"BayerBG8")==0||
strcmp(stFeatureEnm.strSymbolic[i], "BayerRG8")==0||
strcmp(stFeatureEnm.strSymbolic[i], "BayerGB8")==0||
strcmp(stFeatureEnm.strSymbolic[i], "BayerGR8")==0||
strcmp(stFeatureEnm.strSymbolic[i], "RGB8Packed")==0||
strcmp(stFeatureEnm.strSymbolic[i], "BGR8Packed")==0)//比较相机参数格式,这里仅比较了bayer与RGB
{
printf("This is a Color camera \n");
break;
}
}
}
resultado:
 Cámara a color:](https://img-blog.csdnimg.cn/df1916669c9d4345a3931eb932cceb83.png)
2.5 Modificar el formato de imagen de la cámara
//设置Enum型参数-相机图像格式
//注意点1:相机图像格式设置时,只有在MV_CC_Startgrab接口调用前才能设置,取流过程中,不能修改图像格式
nRet = MV_CC_SetEnumValue(handle, "PixelFormat", PixelType_Gvsp_Mono12);
if (MV_OK != nRet)
{
printf("error: Set PixelFormat fail [%x]\n", nRet);
}
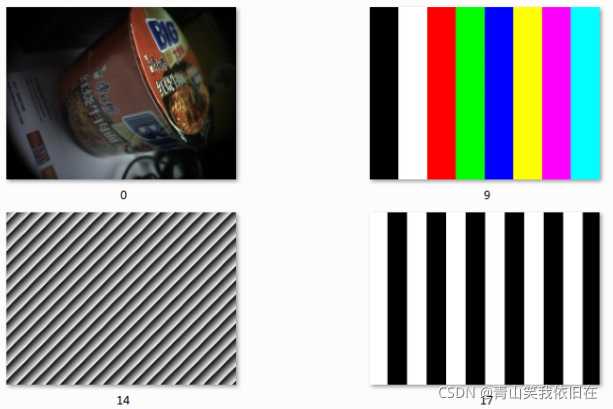
2.6 Activar/desactivar la imagen de prueba integrada de la cámara
2.6.1 Apagar la imagen de prueba (estado predeterminado)
nRet = MV_CC_SetEnumValue(handle, "TestPattern", 0);
if (MV_OK != nRet)
{
printf("Set TestPattern fail! nRet [0x%x]\n", nRet);
break;
}
2.6.2 Abrir la imagen de prueba
nRet = MV_CC_SetEnumValue(handle, "TestPattern", 9);
//0:off,9:ColorBar,14:ObliqueMonoBar,17:TestImage1
if (MV_OK != nRet)
{
printf("Set TestPattern fail! nRet [0x%x]\n", nRet);
break;
}
Efecto:
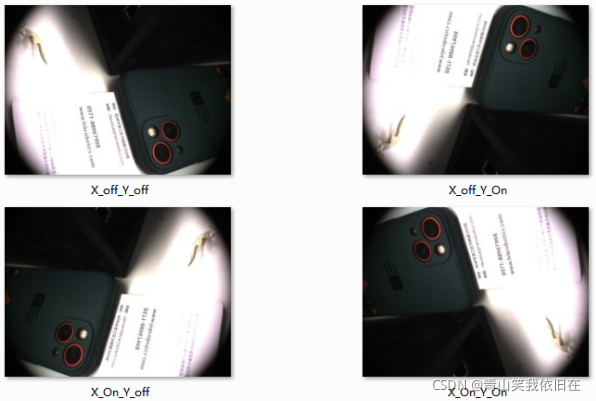
2.7 Activar/desactivar la imagen de la cámara espejo X, espejo Y
nRet = MV_CC_SetBoolValue(handle, "ReverseX", true);
if (MV_OK != nRet)
{
printf("Set ReverseX fail! nRet [0x%x]\n", nRet);
}
//Y镜像需要注意两点
//1.部分相机不支持,所以可能设置不了,具体看相机规格书spec
//2.Y镜像需要停止采集状态下设置,不像X镜像一样可以实时设置,一般在MV_CC_StartGrabbing接口之前调用
nRet = MV_CC_SetBoolValue(handle, "ReverseY", true);
if (MV_OK != nRet)
{
printf("Set ReverseY fail! nRet [0x%x]\n", nRet);
}
Efecto:
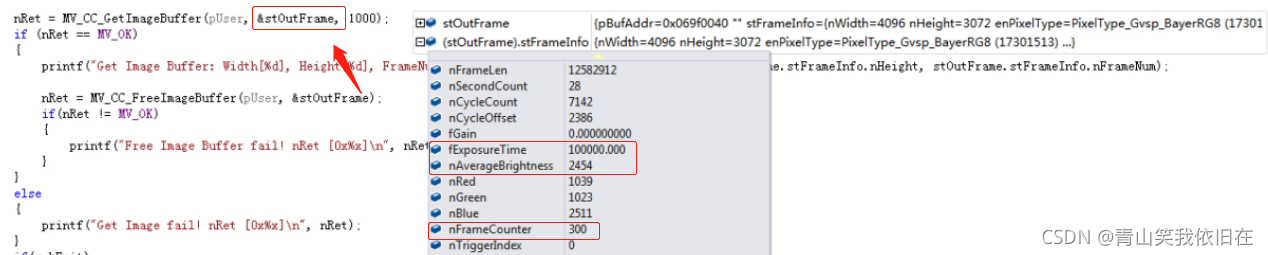
2.8 Activar/desactivar la función de marca de agua de la imagen incrustada en la cámara
La información de la marca de agua de la imagen de la cámara se utiliza para imprimir y grabar la información interna de la cámara. La información de la marca de agua se encuentra en la interfaz de transmisión. El principio
esencial para obtener la marca de agua de la cámara en la estructura de la imagen es reemplazar una pequeña parte de la información a partir del encabezado de la imagen, que ocupa unos 40 bytes Información de datos reales para la transmisión de información sin causar cambios en el tamaño de los datos de la imagen

| parámetro | Palabras clave | valor del parámetro |
|---|---|---|
| marca de tiempo | marca de tiempo | 0 |
| ganar | Ganar | 1 |
| exposición | Exposición | 2 |
| brillo promedio | Información de brillo | 3 |
| balance de blancos | Balance de blancos | 4 |
| número de cuadro | Contador de fotogramas | 5 |
| contador de disparos | ExtTriggerCount | 6 |
| Estado del nivel de entrada y salida de E/S | LíneaEntradaSalida | 7 |
| área de rendimiento de la inversión | ROIPosición | 8 |
//必须停止采集状态下设置,一般在MV_CC_StartGrabbing接口之前调用
//开启相机图像水印,如下,打开了Exposure、BrightnessInfo、Framecounter
nRet = MV_CC_SetEnumValue(handle, "FrameSpecInfoSelector", 2);//Exposure
nRet = MV_CC_SetBoolValue(handle, "FrameSpecInfo", true);
nRet = MV_CC_SetEnumValue(handle, "FrameSpecInfoSelector", 3);//BrightnessInfo
nRet = MV_CC_SetBoolValue(handle, "FrameSpecInfo", true);
nRet = MV_CC_SetEnumValue(handle, "FrameSpecInfoSelector", 5);//Framecounter
nRet = MV_CC_SetBoolValue(handle, "FrameSpecInfo", true);
if (MV_OK != nRet)
{
printf("Set FrameSpecInfofail! nRet [0x%x]\n", nRet);
}
Efecto:
en el proceso de búsqueda activa de la transmisión, la información de la marca de agua se obtiene de la estructura de la imagen y
la función de marca de agua se desactiva
//必须停止采集状态下设置,一般在MV_CC_StartGrabbing接口之前调用
nRet = MV_CC_SetEnumValue(handle, "FrameSpecInfoSelector", 5);//Framecounter
nRet = MV_CC_SetBoolValue(handle, "FrameSpecInfo", false);
3. Control de Adquisición/Control de Adquisición
3.1 Configuración del modo de recopilación
| parámetro | Palabras clave | valor del parámetro | ilustrar |
|---|---|---|---|
| adquisición de un solo cuadro | Un solo cuadro | 0 | Generalmente se usa para software especial como visionpro, y no se recomienda usar este modo normalmente. |
| adquisición continua | Continuo | 2 | Modos de uso común, adquisición de un solo cuadro de disparo suave, adquisición de disparo duro, toma continua de fotos, todos usan este modo |
nRet = MV_CC_SetEnumValue(handle, "AcquisitionMode", 2);
if (MV_OK != nRet)
{
printf("Set FrameSpecInfofail! nRet [0x%x]\n", nRet);
}
3.2 Configuración de adquisición de múltiples fotogramas/AcquisitionBurstFrameCount
AcquisitionBurstFrameCount: en el modo de disparo, cuántos fotogramas se adquieren una vez activados, el valor predeterminado es 1;
si se establece en 2, la cámara recibe una señal y adquiere automáticamente dos fotogramas, y la frecuencia de adquisición cambia según la velocidad de fotogramas
nRet = MV_CC_SetIntValue(handle,"AcquisitionBurstFrameCount",1);
if(nRet != MV_OK)
{
printf("Warning: Set AcquisitionBurstFrameCountfail nRet [0x%x]!", nRet);
}
3.3 Control de velocidad de fotogramas/AdquisiciónFrameRate
//设置相机帧率,需注意不要超过相机支持的最大的帧率(相机规格书),超过了也没有意义
nRet =MV_CC_SetFloatValue(handle, "AcquisitionFrameRate", 5);
if(nRet != MV_OK)
{
printf("Warning: Set AcquisitionBurstFrameCountfail nRet [0x%x]!", nRet);
}
//帧率控制使能,true表示打开,false标识关闭
nRet = MV_CC_SetBoolValue(handle, "AcquisitionFrameRateEnable", true);
if(nRet != MV_OK)
{
printf("Warning: Set AcquisitionBurstFrameCountfail nRet [0x%x]!", nRet);
}
3.4 Configuración del modo de disparo
3.4.1 Configuración de disparador suave/Software
// ch:设置触发模式为on
nRet = MV_CC_SetEnumValue(handle, "TriggerMode", MV_TRIGGER_MODE_ON);
if (MV_OK != nRet)
{
printf("Set Trigger Mode fail! nRet [0x%x]\n", nRet);
}
// ch:设置触发源为软触发
nRet = MV_CC_SetEnumValue(handle, "TriggerSource",MV_TRIGGER_SOURCE_SOFTWARE);//TriggerSource:7
if (MV_OK != nRet)
{
printf("Set Trigger Source fail! nRet [0x%x]\n", nRet);
}
Cuando necesite tomar una foto, ejecute el comando de comando, ejecútelo una vez y la cámara tomará una foto (solo funcionará después de que se habilite el comando de inicio de captura)
nRet = MV_CC_SetCommandValue(handle, "TriggerSoftware");//相机拍照
if (MV_OK != nRet)
{
printf("TriggerSoftware fail! nRet [0x%x]\n", nRet);
}
3.4.2 Configuración/línea de activación dura
El disparador duro debe coincidir con el cableado del disparador duro, y hay muchos parámetros coincidentes Consulte: Módulo de función de cámara industrial Hikvision-Control de entrada y salida IO
Incluyendo:
1. Modo de disparo: TriggerMode está configurado en 1, el modo de disparo es activado
2. Selección de la fuente de disparo: TriggerSource Establézcalo en 0, elija la línea 0, también puede elegir la línea 2 o elegir de todos modos, la línea 0 y la línea 2 dependen del cableado del circuito de hardware, de todos modos es compatible con el disparador suave y el disparador duro al mismo tiempo, depende de si la cámara admite 3. Señal de borde TriggerActivation:
disparador de borde ascendente predeterminado (no se puede configurar)
4. Caché de disparador TriggerCacheEnable: Deshabilitado de forma predeterminada. Cuando la cámara recibe dos señales de activación al mismo tiempo, si esta función no está activada, la cámara solo responderá a una señal y producirá una imagen; después de encenderla, la cámara almacenará automáticamente en caché la segunda señal y procesará inmediatamente después de que se procese la señal anterior Señal de búfer 5. Retardo del disparador Retardo del disparador
: después de recibir la señal, un retardo fijo por un período de tiempo antes de la exposición
// ch:设置触发模式为on
nRet = MV_CC_SetEnumValue(handle, "TriggerMode", MV_TRIGGER_MODE_ON);
if (MV_OK != nRet)
{
printf("Set Trigger Mode fail! nRet [0x%x]\n", nRet);
}
// ch:设置触发源为line硬触发
nRet = MV_CC_SetEnumValue(handle, "TriggerSource",MV_TRIGGER_SOURCE_LINE0);//line0:0,line2:2
if (MV_OK != nRet)
{
printf("Set Trigger Source fail! nRet [0x%x]\n", nRet);
}
3.4.3 Configuración de disparador arbitraria/De todos modos
De todos modos, la cámara puede responder a los comandos de activación suaves y también puede responder a las señales de activación duras de línea 0 y línea 2.
Tenga en cuenta que cuando necesite usar esta función, debe saber si la cámara es compatible con esta función.
// ch:设置触发模式为on
nRet = MV_CC_SetEnumValue(handle, "TriggerMode", MV_TRIGGER_MODE_ON);
if (MV_OK != nRet)
{
printf("Set Trigger Mode fail! nRet [0x%x]\n", nRet);
}
// ch:设置触发源为anyway
nRet = MV_CC_SetEnumValue(handle, "TriggerSource",24);//line0:0,line2:2,anyway:24
if (MV_OK != nRet)
{
printf("Set Trigger Source fail! nRet [0x%x]\n", nRet);
}
3.5 Ajustes de exposición
3.5.1 Ajuste de exposición manual
nRet = MV_CC_SetEnumValue(handle, "ExposureMode",0);//0:Timed
nRet = MV_CC_SetFloatValue(handle, "ExposureTime", 1000);
if (MV_OK != nRet)
{
printf("Set ExposureTime fail nRet [0xd%]\n!", nRet);
}
3.5.2 Configuración de exposición automática
nRet = MV_CC_SetEnumValue(handle, "ExposureMode",0);//0:Timed
//ExposureAuto
nRet = MV_CC_SetFloatValue(handle, "ExposureAuto", 2);//0:off 1:once 2:Continuous
if (MV_OK != nRet)
{
printf("Set ExposureAuto fail nRet [0xd%]\n!", nRet);
}else{
//只有自动曝光或者自动增益开启后,Brightness亮度值方可设置
nRet = MV_CC_SetIntValue(handle,"Brightness",160);
if(nRet != MV_OK)
{
printf("Set BrightnessnRet [0x%x]!", nRet);
}
}
3.5.3 Configuración de exposición ultracorta
//标准曝光模式
nRet = MV_CC_SetEnumValue(handle, "ExposureMode",0);//0:Timed
nRet = MV_CC_SetEnumValue(handle, "ExposureTimeMode", 0);//0:Standard,1:UltraShort
if (MV_OK != nRet)
{
printf("Set Trigger Mode fail! nRet [0x%x]\n", nRet);
}else
{
printf("ExposureTimeMode :Standard\n");
//需要注意曝光值范围
nRet = MV_CC_SetFloatValue(handle, "ExposureTime", 1000);
if (MV_OK != nRet)
{
printf("Set ExposureTime fail nRet [0xd%]\n!", nRet);
}
}
//超短曝光模式
nRet = MV_CC_SetEnumValue(handle, "ExposureTimeMode", 1);//0:standard,1:UltraShort
if (MV_OK != nRet)
{
printf("Set Trigger Mode fail! nRet [0x%x]\n", nRet);
}else
{
printf("ExposureTimeMode :UltraShort\n");
//需要注意曝光值范围
nRet = MV_CC_SetFloatValue(handle, "ExposureTime", 12);
if (MV_OK != nRet)
{
printf("Set ExposureTime fail nRet [0xd%]\n!", nRet);
}
}
Cambio de ganancia de exposición múltiple 3.6 HDR
unsigned ExpValue[4]={
2000,3000,2500,1300};
unsigned GainValue[4]={
0,1,2,3};
for (int i = 0; i < 4; i++)
{
nRet = MV_CC_SetIntValue(handle,"HDRSelector",i);//设置为最大值
if(nRet != MV_OK)
{
printf("Warning: Set HDRSelector fail nRet [0x%x]!", nRet);
}
nRet = MV_CC_SetIntValue(handle,"HDRShutter",ExpValue[i]);//设置为最大值
if(nRet != MV_OK)
{
printf("Warning: Set HDRShutter fail nRet [0x%x]!", nRet);
}
nRet =MV_CC_SetFloatValue(handle, "HDRGain", GainValue[i]);
if(nRet != MV_OK)
{
printf("Warning: Set HDRGain nRet [0x%x]!", nRet);
}
}
4. Control analógico/Control analógico
4.1 Configuración de ganancia analógica
nRet = MV_CC_SetFloatValue(handle, "Gain", 1;
if (MV_OK != nRet)
{
printf("Set Gainfail fail nRet [0xd%]\n", nRet);
}
4.2 Ajuste de ganancia digital
//打开数字增益使能
nRet = MV_CC_SetBoolValue(handle, "DigitalShiftEnable", true);
if (MV_OK != nRet)
{
printf("Set DigitalShiftEnable fail! nRet [0x%x]\n", nRet);
}
//设置数字增益,范围-6~6db
nRet = MV_CC_SetFloatValue(handle, "DigitalShift", 1);
if (MV_OK != nRet)
{
printf("Set DigitalShift fail !nRet [0xd%]\n", nRet);
}
4.3 Configuración de gamma/Gamma
//1.打开数字增益使能
nRet = MV_CC_SetBoolValue(handle, "GammaEnable", true);
if (MV_OK != nRet)
{
printf("Set GammaEnable fail! nRet [0x%x]\n", nRet);
}
//2.设置gamma类型,user:1,sRGB:2
nRet = MV_CC_SetEnumValue(handle, "GammaSelector", 1);
if (MV_OK != nRet)
{
printf("Set GammaSelector fail! nRet [0x%x]\n", nRet);
}
//3.设置gamma值,推荐范围0.5-2,1为线性拉伸
nRet = MV_CC_SetFloatValue(handle, "Gamma", 1);
if (MV_OK != nRet)
{
printf("Set Gamma failed! nRet [0xd%]\n", nRet);
}
4.4 Ajuste de nitidez/Nitidez
4.4.1 Ajustes de nitidez de la cámara
El procesamiento interno de la cámara industrial admite la configuración de nitidez (procesamiento ISP del hardware de la cámara).
La nitidez debe prestar atención al formato de imagen de la cámara. Por ejemplo, YUV, RGB, MONO10, MONO12 y otros formatos no admiten nitidez, por lo que necesita ser realizado por otros métodos
//打开锐度使能
nRet = MV_CC_SetBoolValue(handle, "SharpnessEnable", true);
if (MV_OK != nRet)
{
printf("Set SharpnessEnable failed! nRet [0x%x]\n", nRet);
}
//设置锐度,范围0-100
nRet = MV_CC_SetFloatValue(handle, "Sharpness", 1);
if (MV_OK != nRet)
{
printf("Set Sharpness failed nRet [0xd%]\n", nRet);
}
4.4.2 Ajustes de nitidez del SDK
Cuando el hardware de la cámara no es compatible con el procesamiento de nitidez en algunos casos, Hikvision SDK proporciona una llamada de interfaz de nitidez a nivel de software.
Solo se admiten el formato mono8 y el formato RGB. Otros formatos de imagen deben convertirse primero a estos dos formatos.
static unsigned int __stdcall WorkThread(void* pUser)
{
int nRet = MV_OK;
unsigned char *pConvertData = NULL;
unsigned char *pSharpenData = NULL;
unsigned int nConvertDataSize = 0;
MV_FRAME_OUT stImageInfo = {
0}; //图像帧信息结构体
MV_DISPLAY_FRAME_INFO stDisplayInfo = {
0}; //用于显示的
MV_CC_PIXEL_CONVERT_PARAM stConvertParam = {
0}; //用于格式转化的
MV_CC_SHARPEN_PARAM stSharpenParam ={
0}; //用于锐度的
while(1)
{
nRet = MV_CC_GetImageBuffer(pUser, &stImageInfo, 1000);//取一帧图像
if (nRet == MV_OK)
{
printf("Get Image Buffer: Width[%d], Height[%d], FrameNum[%d]\n",
stImageInfo.stFrameInfo.nWidth, stImageInfo.stFrameInfo.nHeight, stImageInfo.stFrameInfo.nFrameNum);
MvGvspPixelType enDstPixelType = PixelType_Gvsp_Undefined;
unsigned int nChannelNum = 0;//用于判断图像通道数
char chFileName[MAX_PATH] = {
0};
//如果是彩色则转成RGB8
//isColor,isMono函数,看相机图像格式介绍章节
if (IsColor(stImageInfo.stFrameInfo.enPixelType))//判断相机图像原始数据格式是什么
{
nChannelNum = 3;
enDstPixelType = PixelType_Gvsp_RGB8_Packed;
sprintf(chFileName, "AfterConvert.rgb");
}
//如果是黑白则转换成Mono8
else if (IsMono(stImageInfo.stFrameInfo.enPixelType))
{
nChannelNum = 1;
enDstPixelType = PixelType_Gvsp_Mono8;
sprintf(chFileName, "AfterConvert.gray");
}
else
{
printf("Don't need to convert!\n");
}
if (enDstPixelType != PixelType_Gvsp_Undefined)
{
if (NULL == pConvertData)
{
//分配一块区域用于格式转化
pConvertData = (unsigned char*)malloc(stImageInfo.stFrameInfo.nWidth * stImageInfo.stFrameInfo.nHeight * nChannelNum);
if (NULL == pConvertData)
{
printf("malloc pConvertData fail!\n");
nRet = MV_E_RESOURCE;
break;
}
}
nConvertDataSize = stImageInfo.stFrameInfo.nWidth * stImageInfo.stFrameInfo.nHeight * nChannelNum;
// ch:像素格式转换 | en:Convert pixel format
stConvertParam.nWidth = stImageInfo.stFrameInfo.nWidth; //ch:图像宽 | en:image width
stConvertParam.nHeight = stImageInfo.stFrameInfo.nHeight; //ch:图像高 | en:image height
stConvertParam.pSrcData = stImageInfo.pBufAddr; //ch:输入数据缓存 | en:input data buffer
stConvertParam.nSrcDataLen = stImageInfo.stFrameInfo.nFrameLen; //ch:输入数据大小 | en:input data size
stConvertParam.enSrcPixelType = stImageInfo.stFrameInfo.enPixelType; //ch:输入像素格式 | en:input pixel format
stConvertParam.enDstPixelType = enDstPixelType; //ch:输出像素格式 | en:output pixel format
stConvertParam.pDstBuffer = pConvertData; //ch:输出数据缓存 | en:output data buffer
stConvertParam.nDstBufferSize = nConvertDataSize; //ch:输出缓存大小 | en:output buffer size
nRet = MV_CC_ConvertPixelType(pUser, &stConvertParam);//图像格式转化
if (MV_OK != nRet)
{
printf("Convert Pixel Type fail! nRet [0x%x]\n", nRet);
break;
}else
{
printf("Convert Pixel Type ok!\n");
}
}
if(g_Sharpen)//全局变量,用于判断要不要做锐化
{
if (NULL == pSharpenData)
{
pSharpenData = (unsigned char*)malloc(stImageInfo.stFrameInfo.nWidth * stImageInfo.stFrameInfo.nHeight * nChannelNum);
if (NULL == pSharpenData)
{
printf("malloc pConvertData fail!\n");
nRet = MV_E_RESOURCE;
break;
}
}
stSharpenParam.nWidth = stImageInfo.stFrameInfo.nWidth;
stSharpenParam.nHeight = stImageInfo.stFrameInfo.nHeight;
stSharpenParam.enPixelType = enDstPixelType; //像素格式变化,用转化后的图像格式传入
stSharpenParam.pSrcBuf = stConvertParam.pDstBuffer; //输入
stSharpenParam.nSrcBufLen = stConvertParam.nDstBufferSize;//数据大小变化
stSharpenParam.pDstBuf = pSharpenData; //输出,后续处理要用这个数据啦
stSharpenParam.nDstBufSize = stConvertParam.nDstBufferSize; //数据大小变化
stSharpenParam.nSharpenAmount = m_nSharpenAmount;
stSharpenParam.nSharpenRadius = m_nSharpenRadius;
stSharpenParam.nSharpenThreshold = m_nSharpenThreshold;
nRet = MV_CC_ImageSharpen(pUser, &stSharpenParam);
if (MV_OK != nRet)
{
printf("Image Sharpen fail! nRet [0x%x]\n", nRet);
break;
}else
{
printf("Sharpen :50 ok!\n");
}
}
T2=qMyMilliseconds();//计时函数,可以删除
printf("Grab ok!,costtime:%f\n",T2-T1);
if (g_hwnd)
{
stDisplayInfo.hWnd = g_hwnd;
stDisplayInfo.pData = pSharpenData;
stDisplayInfo.nDataLen = nConvertDataSize;
stDisplayInfo.nWidth = stImageInfo.stFrameInfo.nWidth;
stDisplayInfo.nHeight = stImageInfo.stFrameInfo.nHeight;
stDisplayInfo.enPixelType = enDstPixelType;//像素格式变化
nRet =MV_CC_DisplayOneFrame(pUser, &stDisplayInfo);
}
MV_SAVE_IMG_TO_FILE_PARAM stSaveFileParam;//存图测试,可以删除,不调用
memset(&stSaveFileParam, 0, sizeof(MV_SAVE_IMG_TO_FILE_PARAM));
stSaveFileParam.enImageType = MV_Image_Bmp; // ch:需要保存的图像类型 | en:Image format to save
stSaveFileParam.enPixelType = enDstPixelType; // ch:相机对应的像素格式 | en:Camera pixel type
stSaveFileParam.nWidth = stImageInfo.stFrameInfo.nWidth; // ch:相机对应的宽 | en:Width
stSaveFileParam.nHeight = stImageInfo.stFrameInfo.nHeight; // ch:相机对应的高 | en:Height
stSaveFileParam.nDataLen = nConvertDataSize;
stSaveFileParam.pData = pSharpenData;
stSaveFileParam.iMethodValue = 0;
// ch:jpg图像质量范围为(50-99], png图像质量范围为[0-9] | en:jpg image nQuality range is (50-99], png image nQuality range is [0-9]
if (MV_Image_Bmp == stSaveFileParam.enImageType)
{
sprintf_s(stSaveFileParam.pImagePath, 256, "Image_w%d_h%d_fn%03d_%d_%d_%d.bmp", stSaveFileParam.nWidth, stSaveFileParam.nHeight, stImageInfo.stFrameInfo.nFrameNum,m_nSharpenAmount,m_nSharpenAmount,m_nSharpenThreshold);
}
nRet = MV_CC_SaveImageToFile(pUser,&stSaveFileParam);
if(nRet != MV_OK)
{
printf("MV_CC_SaveImageToFile fail! nRet [0x%x]\n", nRet);
}else
{
printf("MV_CC_SaveImageToFile ok!\n");
}
nRet = MV_CC_FreeImageBuffer(pUser, &stImageInfo);
if(nRet != MV_OK)
{
printf("Free Image Buffer fail! nRet [0x%x]\n", nRet);
}
}
else
{
//printf("Get Image fail! nRet [0x%x]\n", nRet);
}
if(g_bExit)
{
break;
}
}
return 0;
}
4.5 Configuración del balance de blancos/BalanceBlancoAuto
4.5.1 Balance de blancos automático
//开启自动白平衡
nRet = MV_CC_SetEnumValue(handle, "BalanceWhiteAuto", 1);
if (MV_OK != nRet)
{
printf("Set BalanceWhiteAuto fail! nRet [0x%x]\n", nRet);
}
//取流之后,自动白平衡采集一段时间,相机自动调整
//调整完毕后后,关闭自动白平衡,即可
sleep(2000);
//关闭自动白平衡
nRet = MV_CC_SetEnumValue(handle, "BalanceWhiteAuto", 0);
if (MV_OK != nRet)
{
printf("Set BalanceWhiteAuto fail! nRet [0x%x]\n", nRet);
}
4.5.2 Balance de blancos manual
//关闭自动白平衡
nRet = MV_CC_SetEnumValue(handle, "BalanceWhiteAuto", 0);
if (MV_OK != nRet)
{
printf("Set BalanceWhiteAuto fail! nRet [0x%x]\n", nRet);
break;
}
//手动白平衡设置
int BalanceRatio_Value[3]={
1100,1024,1800};//R、G、B
for (int i = 0; i < 3; i++)
{
nRet = MV_CC_SetEnumValue(handle, "BalanceRatioSelector", i);
nRet = MV_CC_SetIntValue(handle, "BalanceRatio",BalanceRatio_Value[i]);
}
5. Control de E/S digital/Control de E/S digital
Control de salida 5.1IO
El control de E/S de la cámara se utiliza principalmente para controlar la salida de señal de E/S Para obtener más información, consulte la parte de salida de E/S del artículo: Módulo de función de cámara industrial Hikvision-Control de entrada y salida de E/S
5.2 Introducción a la salida IO y los eventos de salida
La salida IO también puede ser controlada por la cámara. En diferentes períodos de tiempo cuando la cámara funciona, se proporciona una señal de salida para controlar dispositivos externos. Los eventos IO admitidos por las cámaras industriales Hikvision incluyen lo siguiente:
| nombre de la fuente del evento | Palabras clave | valor del parámetro | Función descriptiva |
|---|---|---|---|
| inicio de exposición | ExposiciónStartActive | 0 | Cuando el sensor comienza a exponerse, la señal de salida |
| comienzo de la colección | AcquisitionStartActive | 1 | Señal de salida cuando comienza la lectura de datos, tiempo de inicio de lectura de cuadros |
| fin de colección | AdquisiciónStopActive | 2 | Señal de salida al final de la lectura de datos, hora de finalización de la lectura de cuadros |
| Comienzo de la trama | FrameBurstStartActivo | 3 | La señal se emite cuando los datos de la imagen comienzan a enviarse a través del enlace, y la señal se emite solo cuando brust> 2, lo que a menudo es inútil |
| final del dibujo | MarcoRáfagaFinActivo | 4 | Cuando los datos de la imagen se envían a través del enlace, la señal se emite al final del enlace y la señal se emite solo cuando brust> 2, lo que a menudo es inútil |
| salida de disparo suave | SoftTriggerActivo | 5 | El software llama al comando tiempo de comando, la salida, el usuario puede controlarlo de forma independiente |
| salida de disparo duro | HardTriggerActivo | 6 | Cuando la señal de entrada de la cámara line0\2 recibe la señal de entrada, emite una señal de salida |
| salida de contador | TemporizadorActivo | 7 | Temporizador, calcule el número de señales especificadas recibidas por line0 y line2, y emita una señal de salida |
| desencadenar la salida de espera | MarcoDisparadorEsperar | 8 | La cámara se puede activar, y cuando se recopila la exposición, la señal de activación |
Los más utilizados son el inicio de la exposición, la salida del disparador suave y la salida del disparador duro
. Por ejemplo:
//参数初始化
nRet = MV_CC_SetEnumValue(handle, "LineSelector", 2); //选择对应的硬件输出源
//0:Line0 1:Line1 2:Line2
nRet = MV_CC_SetEnumValue(handle, "LineMode", 8); //仅line2需要设置
//0:Input 1:Output 8:Strobe
nRet = MV_CC_SetEnumValue(handle, "LineSource", 5);
//0:ExposureStartActive 5:SoftTriggerActive 6:HardTriggerActive
int DurationValue=1000,DelayValue=100,PreDelayValue=0;//us
nRet = MV_CC_SetIntValue(handle, "StrobeLineDuration",DurationValue);//脉宽持续时间
nRet = MV_CC_SetIntValue(handle, "StrobeLineDelay",DelayValue);//strobe延时,从曝光开始,延时多久输出
nRet = MV_CC_SetIntValue(handle, "StrobeLinePreDelay",PreDelayValue);//strobe提前输出,曝光延后开始
nRet = MV_CC_SetBoolValue(handle, "StrobeEnable",TRUE);
//Strobe输出使能,使能之后,上面配置参数生效,IO输出与LineSource同步
//-------------------------------------------------------------------------------------
//输出IO信号命令,需要时,调用此行代码,相机通过line2输出一个周期1100us的方波,有效脉宽1000us
nRet = MV_CC_SetCommandValue(m_handle, "LineTriggerSoftware");
6. Control de Comando de Acción/Control de Acción
7. Control de acceso a archivos/Control de acceso a archivos
8. Supervisión de eventos/Control de eventos
8.1 Hora de finalización de la exposición
9. Control de bloques de datos/ChunkDataControl
10. Control de capa de transporte / TransportLayerControl
10.1 Configuración del tiempo de latido
//mv_cc_Opendevice之后调用
//推荐值3000-60000ms,不建议低于3000ms,容易掉线
nRet = MV_CC_SetIntValue(handle,"GevHeartbeatTimeout",3000);//单位ms
if(nRet != MV_OK)
{
printf("Warning: Set Width fail nRet [0x%x]!", nRet);
}
11. Control de configuración de usuario/Control de configuración de usuario
11.1 Guardar parámetros en la cámara
Guarde los parámetros en el conjunto de usuario para asegurarse de que los parámetros no desaparezcan después de apagar la cámara.
//初始化部分,放在Opendevice之后即可
nRet = MV_CC_SetEnumValue(handle, "UserSetSelector", 1);//支持1、2、3组,3组不同参数保存
if (MV_OK != nRet)
{
printf("error: SetEnumValue UserSetSelector fail [%x]\n", nRet);
}
nRet = MV_CC_SetEnumValue(handle, "UserSetDefault", 1);//选择上电后,默认加载那一组参数
if (MV_OK != nRet)
{
printf("error: SetEnumValue UserSetDefault fail [%x]\n", nRet);
}
//大部分参数修改完成后,调用此命令进行保存,不建议频繁调用
nRet = MV_CC_SetCommandValue(m_handle, "UserSetSave");//保存命令
if (MV_OK != nRet)
{
printf("error: SetCommandValue fail [%x]\n", nRet);
}
11.2 Restaurar parámetros predeterminados de fábrica
//相机停止采集后才能调用
nRet = MV_CC_SetEnumValue(handle, "UserSetSelector", 0);//1、2、3是用户自己保存的参数,0是相机出厂参数
if (MV_OK != nRet)
{
printf("error: SetEnumValue UserSetSelector fail [%x]\n", nRet);
}
nRet = MV_CC_SetCommandValue(m_handle, "UserSetLoad");//加载0组参数
if (MV_OK != nRet)
{
printf("error: SetCommandValue fail [%x]\n", nRet);
}