Relevanter Quellcode und Datendateien wurden auf Github aktualisiert: https://github.com/Wuito/Estimation-of-residual-life-of-particle-filter-lithium-ion-battery
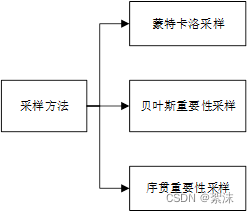
Partikelfilter-Probenahme
Die Vollständigkeit des Partikelfilteralgorithmus basiert auf der von Gordon, Salmond und Smith vorgeschlagenen Resampling-Technologie, und die Entdeckung und kontinuierliche Verbesserung eines neuen Sampling-Algorithmus (Sampling-Importance Resampling) bereichert auch den Partikelfilteralgorithmus.
Partikelfilter-Resampling
Häufig verwendete Resampling-Methoden können in vier Kategorien unterteilt werden: Resampling-Methode für den nächsten Nachbarn, bilineare Resampling-Methode, bikubische Resampling-Methode und Interpolations-Resampling-Methode.
1) Resampling-Methode für den nächsten Nachbarn: Bezieht sich auf den Vergleich der Breite oder Höhe des Zielbilds mit dem Originalbild und die Verwendung des Pixels an der relativen Position des Originalbilds als Wert des Pixels des Zielbilds.
2) Bilineare Resampling-Methode: Bezieht sich auf den Wert von vier Punkten um das entsprechende Pixel des Referenzoriginalbilds und erhält das Zielbild, indem für jeden Punkt ein Gewichtungswert aus der relativen Position ermittelt wird.
3) Bikubische Resampling-Methode: Beziehen Sie sich auf den Wert von 4 * 4 Pixeln um den ursprünglichen Pixelpunkt und erhalten Sie auf dieser Grundlage das Zielbild.
4) Interpolations-Resampling-Methode: Im Vergleich zum obigen Algorithmus bezieht sich diese Methode auf mehr Originalbilddateninformationen und kann zur Lösung symmetrischer Matrixgleichungen und Eigenwertprobleme verwendet werden. Der Resampling-Effekt ist im Allgemeinen besser.
Der Resampling-Algorithmus besteht darin, Schritte entsprechend der Wahrscheinlichkeit zu kopieren und zu eliminieren. Diejenigen mit hohem Gewicht können mehrmals kopiert werden, um sicherzustellen, dass die Gesamtzahl der Partikel grundsätzlich unverändert bleibt, und dann normalisiert, um das Gewicht aller Partikel auf 1/n zu ändern. Fahren Sie mit dem nächsten Schritt der Prognoseaktualisierung fort. Obwohl die Anwendung von Resampling das Problem des Partikelabbaus nicht vollständig beseitigen wird, wird es das Problem des Partikelabbaus erheblich verbessern.
Obwohl die Resampling-Methode das Problem der Partikelverschlechterung bis zu einem gewissen Grad reduzieren kann, führt sie unweigerlich zum Verlust der Beispielvielfalt, d. h. N=1/(∑▒W_K^i), je kleiner N, desto kleiner Je schwerwiegender das Problem des Partikelabbaus ist, desto mehr Resampling ist erforderlich, und solche mehrfachen Resamplings verlangsamen natürlich den Partikelfilter.
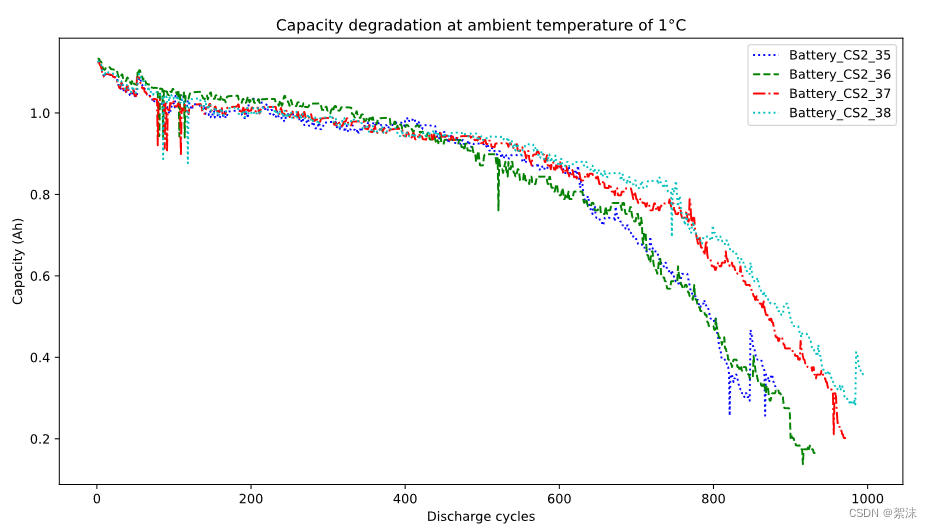
Modell mit verblassender Batteriekapazität
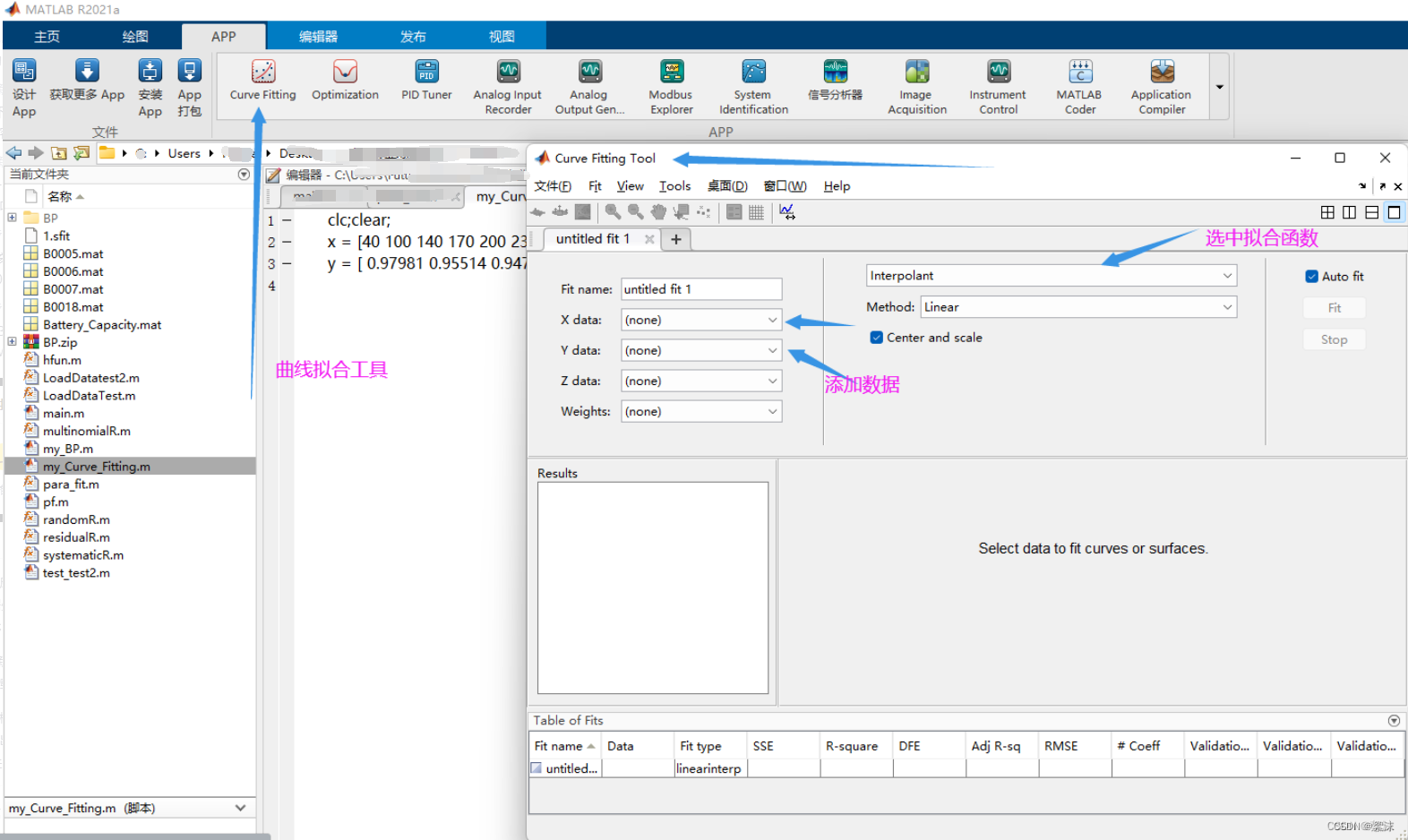
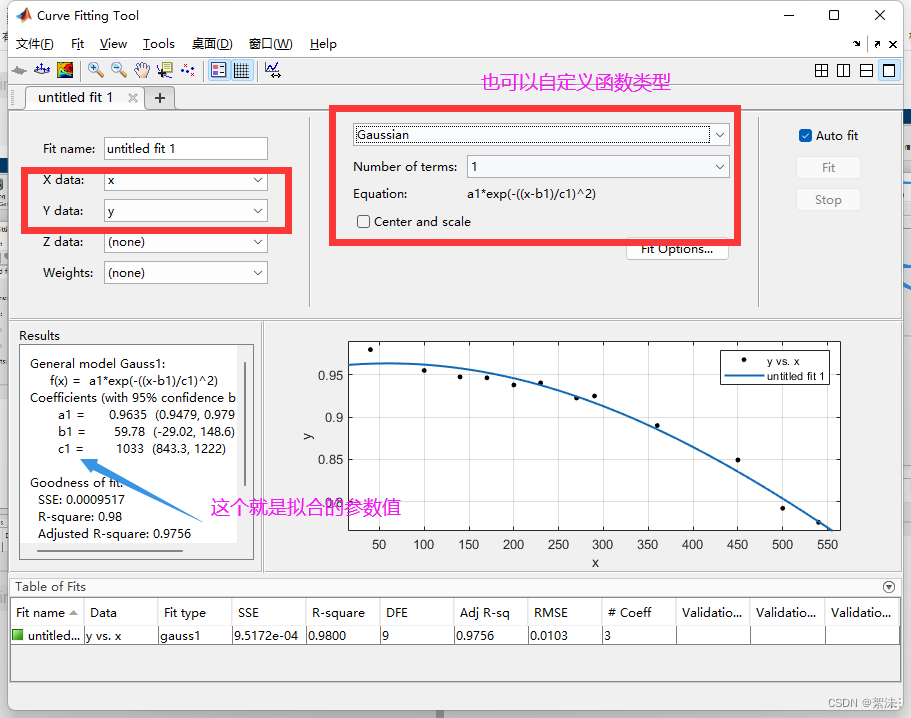
Gemäß der Formel zur Berechnung der Batteriekapazität: Q=∫_tc^td▒〖I(t)dt〗, wobei tc die Ladezeit, td die Batterieentladezeit, I(t) den Strom und Q das Lithium darstellt ion Die Echtzeitkapazität der Batterie, während die verstrichene Zeit t die Zeit vom Beginn des Batteriezyklus bis zum Ende des Experiments aufzeichnet. Durch die exponentielle Anpassung der vier Batteriekapazitätsdaten mithilfe der Matlab-Kurvenanpassungs-Toolbox kann ein genaueres exponentielles Zerfallsmodell erhalten werden.
Gemäß dem Batteriezerfallsmodell wählen wir das doppelt exponentielle empirische Modell.

Q stellt die Batteriekapazität zum Zeitpunkt k dar, wobei k die Anzahl der Zyklen ist, a, b, c und d sich alle auf die Lithium-Ionen-Batterie selbst beziehen, sodass a, b, c und d genauer geschätzt werden können , dann die Batterie selbst. Je realistischer die Simulation, desto genauer kann sie die Batterielebensdauer vorhersagen.
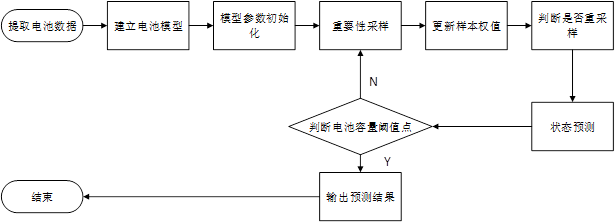
Algorithmusprozess
Um die Methode des Partikelfilteralgorithmus zusammenzufassen, gibt es ein Flussdiagramm:
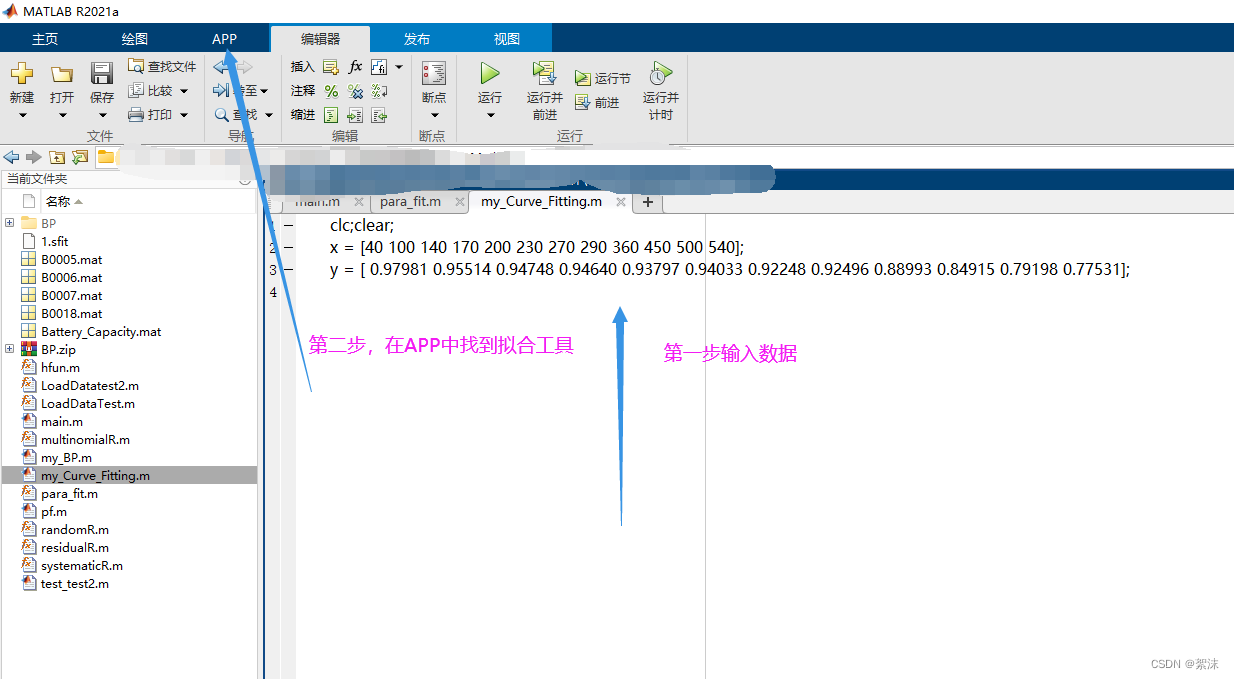
Verwenden Sie die Softwareumgebung Python3.8, Numpy1.23 und Matplotlib3.6, um den obigen Algorithmus zu entwerfen. Führen Sie das Python-Programm aus, um die Kapazitätsvorhersagekarte der CS2-Batterie zu erhalten. Im Experiment wird CS2_36 als Stichprobensatz verwendet, und die ersten 600 Daten der Stichprobe werden zufällig im Verhältnis 10:1 abgetastet, und dann wird das doppelte Exponentialmodell verwendet angepasst mit der Matlab Fitting Toolbox.
Kurvenanpassung
Beginnen Sie mit der Filterung mit den angepassten Parametern und Algorithmusgleichungen:
Beachten Sie, dass die hier von Python geladenen Daten zuvor berechnet und gespeichert wurden.
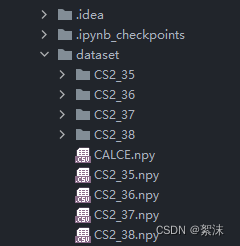
Dies ist die Dateistruktur meines Projekts. Sie müssen die Daten der University of Maryland im vorherigen Blog herunterladen, die Daten verarbeiten und als Datei im npy-Format speichern und sie dann hier anwenden.
Zuerst die Darstellung des Partikelfilters:
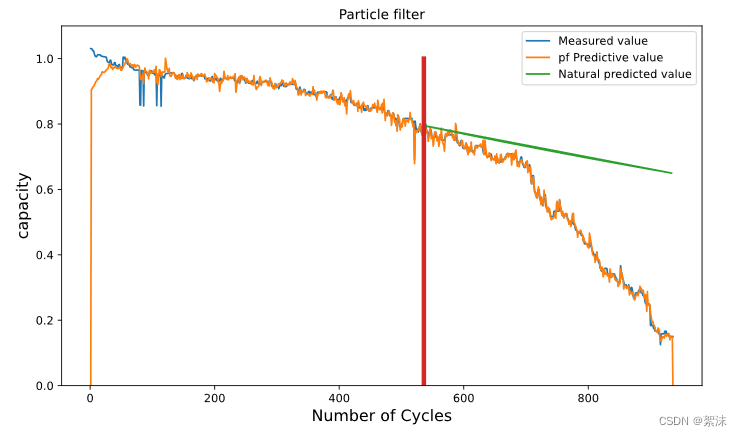
Blau ist der beobachtete Wert, Gelb ist der berechnete Wert des Filters, beginnend mit der roten Linie, und Grün ist der berechnete Wert der natürlichen Beobachtung ohne Filterung.
# 基于粒子滤波的锂离子电池RUL预测
# From: SWUST IPC14 Dai
import numpy as np
import matplotlib.pyplot as plt
from scipy.linalg import sqrtm
# Python3.8、Numpy1.23、matplotlib3.6
# 除去数据异常的较大值和较小值点
def drop_outlier(array, count, bins):
index = []
range_ = np.arange(1, count, bins)
for i in range_[:-1]:
array_lim = array[i:i + bins]
sigma = np.std(array_lim)
mean = np.mean(array_lim)
th_max, th_min = mean + sigma * 2, mean - sigma * 2
idx = np.where((array_lim < th_max) & (array_lim > th_min))
idx = idx[0] + i
index.extend(list(idx))
return np.array(index)
# 剩余容量双指数方程,状态方程
def hfun(X, k):
Q = X[0] * np.exp(X[1] * k) + X[2] * np.exp(X[3] * k)
return Q
# 重采样步骤:
# 预测:抽取新粒子
# 更新:更新粒子权值
# 状态估计
# 多项式重采样
# 重采样
def randomR(inIndex, q):
outIndex = np.zeros(np.shape(inIndex))
num = np.shape(q)
u = np.random.rand(num[0], 1)
u = np.sort(u, axis = 0)
u = np.array(u)
l = np.cumsum(q, axis=0)
i = 0
for j in np.arange(0, num[0]):
while (i <= (num[0]-1)) and (u[i] <= l[j]):
outIndex[i] = j
i = i + 1
return outIndex
# capacity:阶段放电容量
# resistance:放电阶段电池的的内阻平均值
# CCCT:恒定电流充电时间
# CVCT: 恒定电压充电时间
if __name__ == "__main__":
# ========================================
# 加载数据
# ========================================
Battery_name = 'CS2_38'
Battery = np.load('dataset/' + Battery_name + '.npy', allow_pickle=True)
Battery = Battery.item()
battery = Battery[Battery_name]
names = ['capacity', 'resistance', 'CCCT', 'CVCT']
# battery[1] = battery[1] /(battery[1] + 1.1)
# 粒子滤波步骤
# 初始化
# 更新粒子状态
# 权值计算和归一化
# 重采样
# 判断程序是否结束,迭代
# ========================================
# 预估数据为电池容量
# ========================================
N = len(battery['cycle'])
pf_Number = 200 # 粒子数
Prediction_Interval = 300 # 未来趋势值,预测区间的大小
cita = 1e-4
wa = 0.000001 # 设定状态初始值
wb = 0.01
wc = 0.1
wd = 0.0001
Q = cita * np.diag([wa, wb, wc, wd]) # Q为过程噪声方差矩阵,diag()创建指定对角矩阵
F = np.eye(4) # F为驱动计算矩阵,eye()单位对角矩阵
R = 0.001 # 观测噪声的协方差
# ========= 状态方程赋初值 ==============
a = -0.0000083499
b = 0.055237
c = 0.90097
d = -0.00088543
X0 = np.mat([a, b, c, d]).T # 矩阵转置
# ========= 滤波器状态初始化 ==============
Xpf = np.zeros([4, N])
Xpf[:, 0:1] = X0 # 对齐数组
# ========= 粒子集初始化 ==============
Xm = np.zeros([4, pf_Number, N])
for i in np.arange(0, pf_Number - 1):
sqr1 = np.array(sqrtm(Q))
sqr2 = sqr1.dot(np.random.randn(4, 1)) # 矩阵乘法,直接用*是矩阵点乘
Xm[:, i:i + 1, 0] = X0 + sqr2 # 对齐数组,需要将矩阵对齐后才能相加
# ========= 从数据集读取观测量 =============
capacity = battery[names[0]]
Z = np.array(capacity)
# ========= Zm为滤波器预测观测值,Zm与Xm对应 =============
Zm = np.zeros([1, pf_Number, N])
# ========= Zpf与Xpf对应 =============
Zpf = np.zeros([1, N]) # 计算中得到的Zpf为滤波器更新得到的容量值
# ========= 权值初始化 =============
Weight = np.zeros([N, pf_Number]) # 计算中得到的W为更新的粒子权重
# 粒子滤波算法
for k in np.arange(1, N - 1):
# 重要性采样
for i in np.arange(0, pf_Number - 1):
sqr1 = np.array(sqrtm(Q)) # 观测噪声
sqr2 = sqr1.dot(np.random.randn(4, 1)) # 矩阵乘法,直接用*是矩阵点乘
Xm[:, i:i + 1, k] = F.dot(Xm[:, i:i + 1, k - 1]) + sqr2
# 权值重要性计算
for i in np.arange(0, pf_Number - 1):
Zm[0, i:i + 1, k] = hfun(Xm[:, i:i + 1, k], k) # 观测预测
Weight[k, i] = np.exp(-(Z[k] - Zm[0, i:i + 1, k:k + 1]) ** 2 / 2 / R) + 1e-99 # 重要性权值计算,乘方用 **
Weight[k, :] = Weight[k, :] / sum(Weight[k, :]) # 权值归一化
# 重采样
# 这里的重采样以权值为传入值,返回值为采样后的索引
outlndex = randomR(np.arange(0, pf_Number), Weight[k, :])
# 得到新的样本
for i in np.arange(0, len(outlndex)):
Xm[:, i, k] = Xm[:, int(outlndex[i]), k]
# 滤波后的状态更新,更新参数[a,b,c,d]
Xpf[:, k] = [np.mean(Xm[0, :, k]),
np.mean(Xm[1, :, k]),
np.mean(Xm[2, :, k]),
np.mean(Xm[3, :, k])]
# 更新后的状态计算预测的容量值
Zpf[0, k] = hfun(Xpf[:, k], k)
# ========================================
# 计算自然条件下的预测值
# ========================================
start = N - Prediction_Interval # 预测的区间
Zf = np.zeros(Prediction_Interval) # 自然预测值
Xf = np.zeros(Prediction_Interval)
for k in np.arange(start-1, N-1):
Zf[k-start] = hfun(Xpf[:, start], k)
Xf[k-start] = k
# 画线
nax = [start, start]
nay = [0, 1]
plt.figure(figsize=(12, 9))
plt.title('Particle filter '+ Battery_name) # 折线图标题
plt.xlabel('Number of Cycles', fontsize=14)
plt.ylim((0, 1.1))
plt.ylabel(names[0], fontsize=14)
plt.plot(battery['cycle'], Z, markersize=3)
plt.plot(battery['cycle'], Zpf[0, :], markersize=3)
plt.plot(Xf, Zf, markersize=3)
plt.plot(nax, nay, linewidth=4)
plt.legend(['Measured value', 'pf Predictive value', 'Natural predicted value'])
plt.show()
Matlab-Partikelfilter
main.m
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 版权声明:
% 本程序的详细中文注释请参考
% 黄小平,王岩,缪鹏程.粒子滤波原理及应用[M].电子工业出版社,2017.4
% 书中有原理介绍+例子+程序+中文注释
% 如果此程序有错误,请对提示修改
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 函数功能:粒子滤波用于电源寿命预测
% function main
load Battery_Capacity
%%load Battery_Capacity
N=length(A5Cycle);
% error('下面的参数M请参考书中的值设置,然后删除本行代码')
M=200; %%粒子数
Future_Cycle=100; % 未来趋势
if N>260
N=260; % 过滤大于260的数字
end
%过程噪声协方差Q
cita=1e-4;
wa=0.000001;wb=0.01;wc=0.1;wd=0.0001;
Q=cita*diag([wa,wb,wc,wd]);
%驱动矩阵
F=eye(4);
%观测噪声协方差
R=0.001;
a=-0.0000083499;b=0.055237;c=0.90097;d=-0.00088543;
X0=[a,b,c,d]';
%滤波器状态初始化
Xpf=zeros(4,N);
Xpf(:,1)=X0;
% 粒子集初始化
Xm=zeros(4,M,N);
for i=1:M
Xm(:,i,1)=X0+sqrtm(Q)*randn(4,1);
end
% 观测量
Z(1,1:N)=A12Capacity(1:N,:)';
Zm=zeros(1,M,N);
Zpf=zeros(1,N);
W=zeros(N,M);
%粒子滤波算法
for k=2:N
% 采样
for i=1:M
Xm(:,i,k)=F*Xm(:,i,k-1)+sqrtm(Q)*randn(4,1);
end
% 权值重要性计算
for i=1:M
Zm(1,i,k)=feval('hfun',Xm(:,i,k),k);
W(k,i)=exp(-(Z(1,k)-Zm(1,i,k))^2/2/R)+1e-99;
end,
W(k,:)=W(k,:)./sum(W(k,:));
% 重采样
outIndex = randomR(1:M,W(k,:)'); % 调用外部函数
% 得到新样本
Xm( :, :, k)=Xm( :, outIndex, k);
% 滤波后的状态更新
Xpf(:,k)=[mean(Xm(1,:,k));mean(Xm(2,:,k));mean(Xm(3,:,k));mean(Xm(4,:,k))];
% 更新后的状态计算
Zpf(1,k)=feval('hfun',Xpf(:,k),k);
end
%预测未来电容的趋势
start=N-Future_Cycle;
for k=start:N
Zf(1,k-start+1)=feval('hfun',Xpf(:,start),k);
Xf(1,k-start+1)=k;
end
Xreal=[a*ones(1,M);b*ones(1,M);c*ones(1,M);d*ones(1,M)];
figure
subplot(2,2,1);
hold on;box on;
plot(Xpf(1,:),'-r.');plot(Xreal(1,:),'-b.')
legend('粒子滤波后的a','平均值a')
subplot(2,2,2);
hold on;box on;
plot(Xpf(2,:),'-r.');plot(Xreal(2,:),'-b.')
legend('粒子滤波后的b','平均值b')
subplot(2,2,3);
hold on;box on;
plot(Xpf(3,:),'-r.');plot(Xreal(3,:),'-b.')
legend('粒子滤波后的c','平均值c')
subplot(2,2,4);
hold on;box on;
plot(Xpf(4,:),'-r.');plot(Xreal(4,:),'-b.')
legend('粒子滤波后的d','平均值d')
figure
hold on;box on;
plot(Z,'-b.')
plot(Zpf,'-r.')
plot(Xf,Zf,'-g.')
bar(start,1,'y')
legend('实验测量数据','滤波估计数据','自然预测数据')
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
hfun.m
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 版权声明:
% 本程序的详细中文注释请参考
% 黄小平,王岩,缪鹏程.粒子滤波原理及应用[M].电子工业出版社,2017.4
% 书中有原理介绍+例子+程序+中文注释
% 如果此程序有错误,请对提示修改
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 函数名称:电容的观测函数
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function Q=hfun(X,k)
Q=X(1)*exp(X(2)*k)+X(3)*exp(X(4)*k);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
randomR.m
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 版权声明:
% 本程序的详细中文注释请参考
% 黄小平,王岩,缪鹏程.粒子滤波原理及应用[M].电子工业出版社,2017.4
% 书中有原理介绍+例子+程序+中文注释
% 如果此程序有错误,请对提示修改
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function outIndex = randomR(inIndex,q);
if nargin < 2
error('Not enough input arguments.');
end
outIndex=zeros(size(inIndex));
[num,col]=size(q);
u=rand(num,1);
u=sort(u);
l=cumsum(q);
i=1;
for j=1:num
while (i<=num)&(u(i)<=l(j))
outIndex(i)=j;
i=i+1;
end
end