Feliz de trabajar durante 8 días en el Día Nacional. Es genial cambiar el código. El talento lo es todo. El origen de este blog es porque hice un experimento y la distancia efectiva de la cámara es realmente mala. Llamé al técnico y dijo que su distancia efectiva es de 4 m, y luego la diferencia de borde es del 2%, lo cual es indignante. La distancia efectiva de mi equipo es de aproximadamente 1 m, y a veces no es precisa en el medio, y mucho menos en el borde, así que eche un vistazo en la calibración.
1. Descarga la herramienta Visor
Enlace de descarga del sitio web oficial: Intel RealSense SDK 2.0: cámaras de seguimiento y profundidad Intel RealSense
Mi Baidu Netdisk: Enlace: https://pan.baidu.com/s/1QXYS3UPEQCtUkuH_6G60PA Código de extracción: s1h1
2. Abra Intel RealSense Viewer y conecte el dispositivo (p. ej.: D435i)

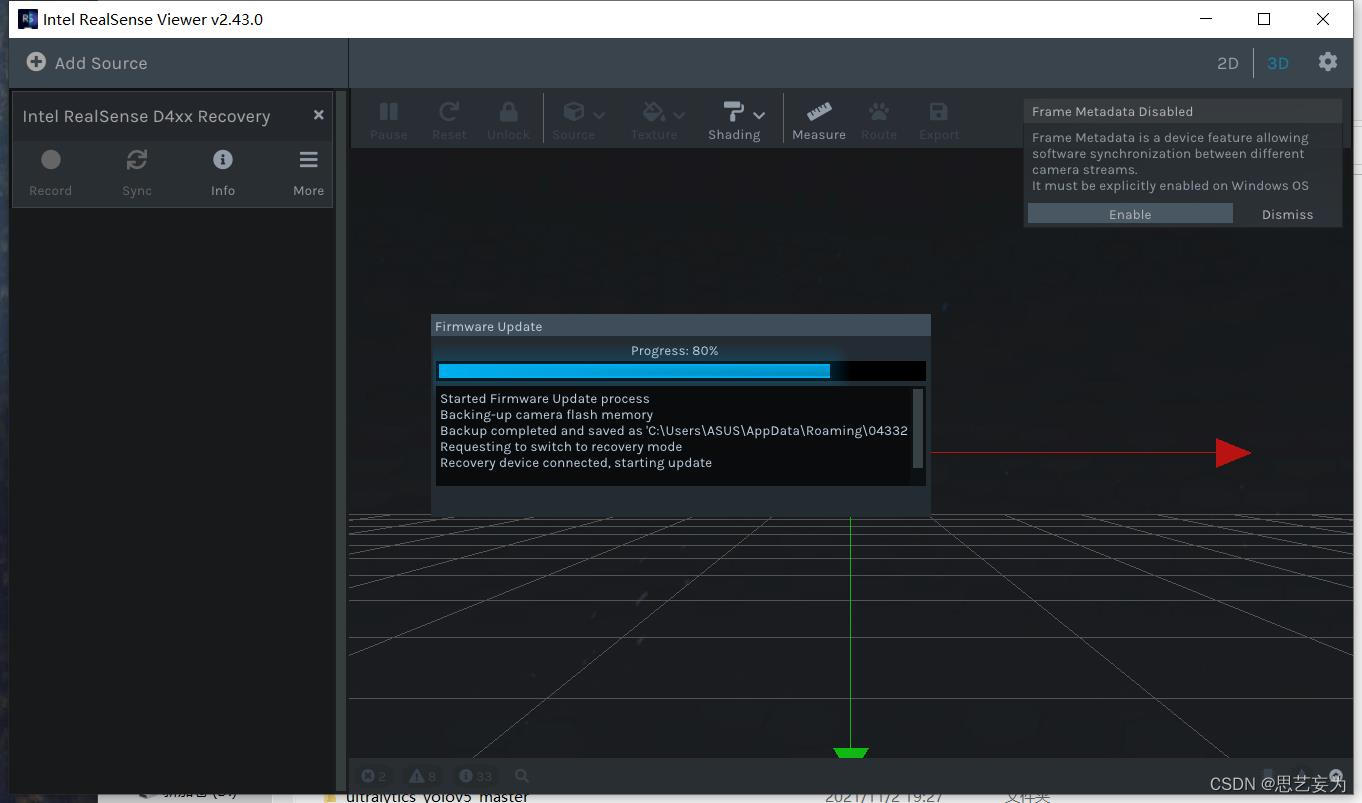
3. Primero haga clic en "Más" - "Instalar firmware recomendado" para instalar la versión de firmware recomendada y espere a que se actualice el firmware.
4. Los escenarios de autocalibración generalmente se pueden dividir en tres tipos
4.1 Gran pared blanca
Encuentre una pared blanca plana y grande, arregle la cámara, haga clic en "Más" - "Calibración en chip", en la ventana emergente que aparece a la derecha, seleccione: rápido en Velocidad, y luego seleccione Intrínseco y Extrínseco ), simplemente sintonice uno por uno.

En la ventana emergente que aparece a la derecha, puede ver dos valores Health-Check y FL Health-Check

Cuando HC<0.25, FL HC<0.15, mantenga los datos de calibración originales, haga clic en "Descartar" para ignorar.
Cuando HC> 0,25, FL HC> 0,15, mejore los datos de calibración originales, es decir, haga clic en "Aplicar nuevo" para aplicar los nuevos datos de calibración, vuelva a ejecutar la calibración en chip y continúe observando los dos valores hasta que son respectivamente inferiores a 0,25 y 0,15,
Si HC o FL HC> 0.75, los datos de calibración originales deben mejorarse y se recomienda usar la calibración dinámica o la calibración OEM directamente
4.2 En cualquier entorno (tenga en cuenta que la profundidad efectiva cubre más del 50%)

Repita la operación anterior, en la selección de Velocidad, si la calidad de la Profundidad cae significativamente, se recomienda seleccionar "Lenta", si desea mejorar periódicamente la Profundidad, puede seleccionar "Rápida" y ajustar los dos parámetros estar dentro del rango Bueno.
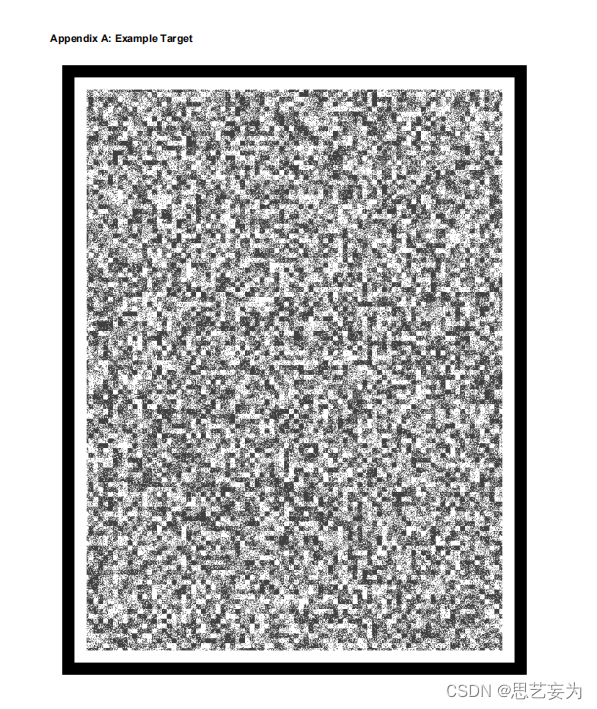
4.3 Escenario ideal: un objetivo plano texturizado
Imprima y calibre el papel de destino de textura, fije el papel de destino en la pared, alinee y repita la operación. En la selección de Velocidad, si la calidad de la profundidad cae significativamente, se recomienda seleccionar "Lenta". Si la profundidad ( calidad) generalmente se mejora, puede elegir "Rápido".
5. Termina el espolvoreado
Después de la finalización, haré otro experimento para ver si hay alguna mejora. Creo que 2 m es lo máximo. El técnico dijo 4 m y dijo que el error de borde es del 2%. Creo que es una tontería. Mi equipo es D435 y D435i, que supera los 1500 mm. Salto, si el equipo de alguien es realmente tan poderoso, envíeme un mensaje privado en segundo plano, ¡déjeme abrir los ojos!