Procesamiento de imágenes Capítulo 8
- Capítulo 8 Segmentación de imágenes
-
- 8.1 Definición de segmentación de imágenes
- 8.2 Uso de umbrales para la segmentación de imágenes
- 8.3 Detección de bordes y conexión
- 8.4 Segmentación de región (el algoritmo de región utiliza la similitud de píxeles)
- 8.5 Procesamiento de imágenes binarias
Capítulo 8 Segmentación de imágenes
8.1 Definición de segmentación de imágenes
(1) Definición de segmentación de imágenes El proceso de
dividir una imagen digital en regiones disjuntas (no superpuestas)
(2) Definición de región
Conjunto de píxeles conectados
(3) Definición de conectividad
Entre dos píxeles cualesquiera de un conjunto conectado, existe una ruta conectada compuesta enteramente por los elementos de este conjunto.
8.2 Uso de umbrales para la segmentación de imágenes
8.2.1 Umbral fijo
(1) Definición
Establezca el valor del umbral de gris en toda la imagen como una constante.
Requisito previo: si el valor de gris del fondo puede considerarse razonablemente constante en toda la imagen, y todos los objetos y el fondo tienen casi el mismo contraste, entonces, siempre que se seleccione el umbral correcto, un umbral fijo generalmente será más Buenos resultados.
8.2.2 Umbral automático
Método mejorado de umbral fijo: utilice umbral automático.
En muchos casos, el valor de gris del fondo no es constante , y el contraste entre el objeto y el fondo los cambios en la imagen. En este momento, un umbral que funciona bien en una zona de la imagen no puede funcionar bien en otras areas. En este caso, el valor del umbral de gradación se toma como una posición de la imagen con una variación lenta en el valor de función .
En algunos trabajos, el umbral adaptativo se denomina umbral dinámico .
8.2.3 Umbral óptimo
A menos que el objeto de la imagen tenga un borde pronunciado, el valor del umbral de gris tiene una gran influencia en la ubicación del límite del objeto extraído y el tamaño total . Esto significa que la medición posterior del tamaño (especialmente el área ) es muy sensible a la elección del umbral de gris . Por esta razón, necesitamos un método óptimo, o al menos consistente, para determinar el umbral.
8.2.3.1 Técnica de histograma
Una imagen que contiene un objeto que contrasta claramente con el fondo, que tiene un histograma en escala de grises que contiene picos dobles
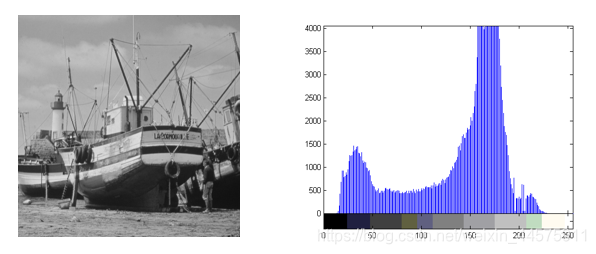
Código de generación de histograma imhist ()
imhist ()
pic = imread('coins.png');%读图
%imshow(pic)显示原图
%figure窗体
hist_pic=imhist(pic)%显示直方图
o
pic=imread('coins.png');
subplot(121),imshow(pic),title('原图');
subplot(122),imhist(pic),title('直方图');
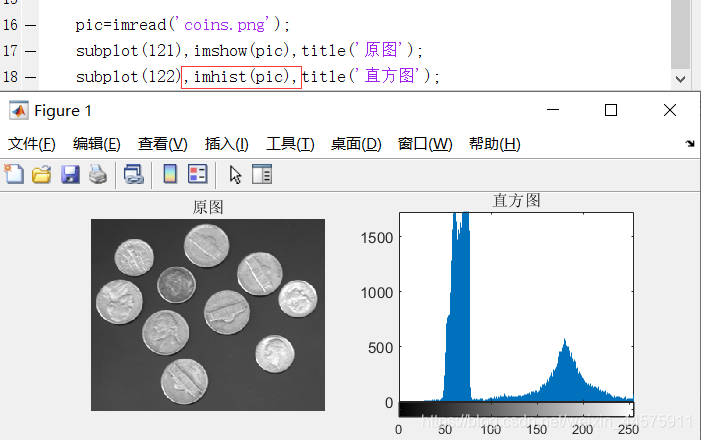
ps: imhist () muestra directamente el histograma, no es necesario agregar imshow
8.2.3.2 Método de varianza máxima entre clases (OTSU)
Función en matlab: graythresh (), no en ppt, pero debería ser muy común
(1) Definición
Este algoritmo se deriva del principio del método de mínimos cuadrados sobre la base del histograma gris y tiene el umbral de segmentación óptimo en un sentido estadístico.
(2) Principio
Divida el histograma en escala de grises de la imagen en dos partes con el umbral óptimo y haga que la varianza entre las dos partes tome el valor máximo , es decir, la separación máxima .
Requisito previo: El método de segmentación de umbral para los dos tipos de objetos se realiza bajo la premisa de que la distribución de grises entre el primer plano y el fondo de la imagen no se superponga entre sí.
8.2.3.3 Método iterativo para umbral
(1) Principio
Requisito previo: El método de segmentación de umbral para dos tipos de objetos se realiza bajo la premisa de que la distribución de grises entre el primer plano y el fondo en la imagen no se superpone entre sí.
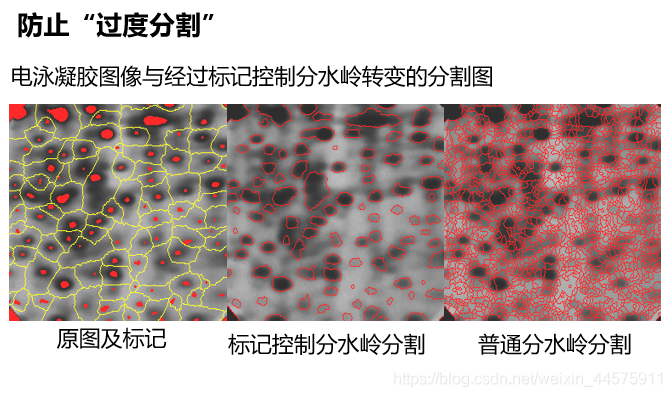
8.2.4 Algoritmo de segmentación de cuencas
(1) Principio de segmentación
Cualquier imagen en escala de grises se puede considerar como un mapa topográfico.
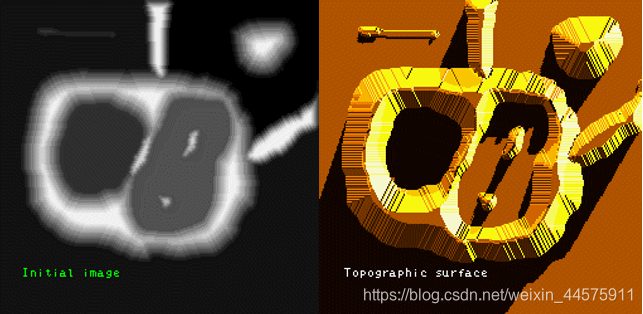
(2) Defina
el gradiente del método de segmentación de la cuenca aplicada a la imagen, luego la cuenca teóricamente corresponde al área con el cambio de escala de grises más pequeño, y La cuenca corresponde al área donde el nivel de gris cambia relativamente más.
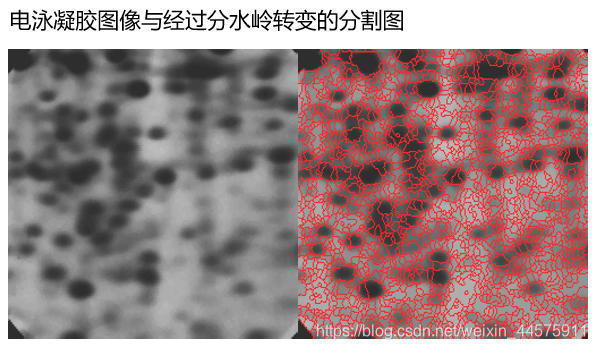
(3) Desventajas
Desventajas: "Segmentación excesiva" causada por ruido o irregularidades locales
(4) Mejorar para
evitar la "segmentación excesiva"
(5) Segmentación jerárquica
(1) A través del algoritmo de cuenca, obtenga una imagen de segmentación inicial
(2) Con base en estas alturas relativas, use el algoritmo de cuenca nuevamente
Utilice dos algoritmos de cuencas hidrográficas para obtener un mejor mapa de segmentación de cuencas hidrográficas

8.3 Detección de bordes y conexión
(1) Punto de borde
Otra forma de determinar el límite de un objeto en una imagen es detectar primero el estado de cada píxel y su vecindad inmediata para determinar si el píxel está realmente en el límite de un objeto. Los píxeles con las características deseadas se marcan como puntos de borde.
(2) Imagen de borde
Cuando el nivel de gris de cada píxel de la imagen se utiliza para reflejar el grado en el que cada píxel cumple los requisitos de los píxeles de borde, este tipo de imagen se denomina imagen de borde.
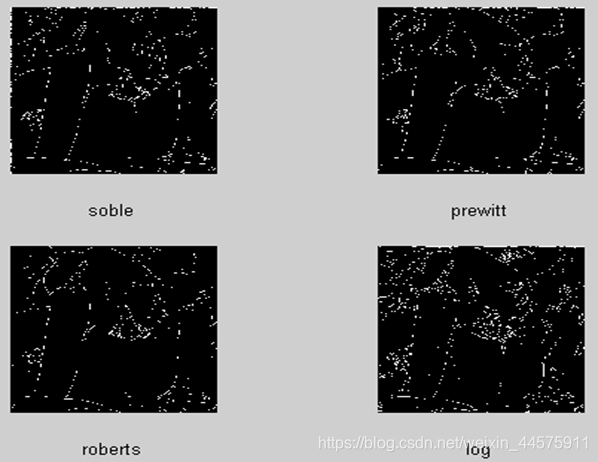
8.3.1 Detección de bordes
El operador de detección de bordes verifica la vecindad de cada píxel y cuantifica la tasa de cambio del nivel de gris, que generalmente incluye la determinación de la dirección. Hay varios métodos que se pueden utilizar, la mayoría de los cuales se basan en la convolución de la máscara de derivada direccional.
①Roherts operator②Sobel borde
borde operator③Prewitt
borde operator④Kirsch
operador borde
Imagen de efecto:
8.3.2 Conexión de borde
(1) Problema
Si el borde es obvio y el nivel de ruido es bajo, entonces la imagen del borde se puede binarizar y refinar en una imagen de límite conectada cerrada de un solo píxel de ancho.
Sin embargo, en condiciones no ideales, estas imágenes de borde tendrán espacios que deben rellenarse.
(2) Solución El
llenado de pequeños huecos se puede lograr simplemente buscando un vecindario de 5 × 5 o más grande centrado en un determinado punto final, encontrando otros puntos finales en el vecindario y completando los píxeles de límite necesarios para conectarlos.
Sin embargo, para escenas complejas con muchos puntos de borde, este método puede sobre segmentar la imagen. Para evitar una segmentación excesiva , se puede estipular que los dos puntos finales solo se puedan conectar cuando la fuerza y la dirección del borde sean similares .
①
Brecha de búsqueda heurística , dos puntos finales, encuentra la ruta óptima global entre los dos extremos (debido a la compleja tecnología de búsqueda heurística, es posible que no pueda encontrar el óptimo)
②Curva de ajuste
③Hough transformar
8.4 Segmentación de región (el algoritmo de región utiliza la similitud de píxeles)
El método de segmentación de regiones utiliza la naturaleza espacial de la imagen y considera la relación espacial Los píxeles segmentados que pertenecen a la misma región tienen propiedades similares.
El espacio de imagen más complejo se realiza mediante tecnología de segmentación de regiones.
8.4.1 Método de crecimiento regional (solo entiéndalo)
Dividido en:
(1) Conexión simple
Este es un método de crecimiento de área basado en un solo píxel. Comienza desde el punto de detección satisfecho (núcleo de conexión) y examina los alrededores (4 vecindarios u 8 vecindarios) que no pertenecen a ningún área. Punto , si sus características cumplen con los criterios de aceptación, se combina como la misma área para formar un núcleo de conexión, luego se detectan los puntos circundantes y los puntos que cumplen con los criterios de acceso se fusionan para generar un nuevo núcleo. Repita el proceso anterior hasta que no haya puntos para fusionar, el proceso de producción finaliza.
(2) Método de
fusión de subregiones Proceso de fusión:
Primero: divida la imagen en pequeñas regiones (
denominadas subregiones) de tamaño.
Segundo: comenzando desde la primera subárea en la esquina superior izquierda, calcule
las estadísticas de escala de grises de la subárea y la subárea adyacente respectivamente , y luego haga un
juicio de similitud. Si las distribuciones grises de los dos son similares y cumplen con
los criterios de aceptación. Las subáreas adyacentes se fusionan en las subáreas actuales para
formar las subáreas actuales en la siguiente ronda de fusión de juicio.
8.4.1 Método regional de división y fusión (no en ppt)
8.5 Procesamiento de imágenes binarias
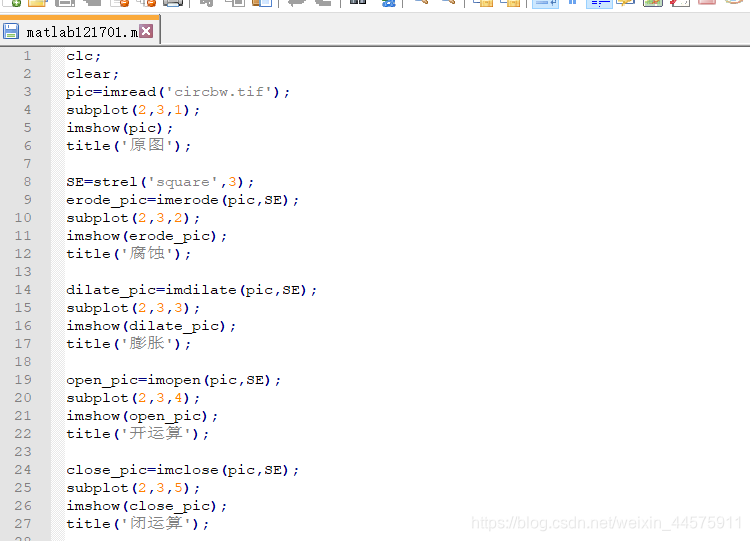
8.5.1 Procesamiento de imágenes de morfología matemática
ps: Operación abierta para eliminar objetos pequeños (corrosión y luego expansión), operación cerrada para conectar huecos (expandir y luego corrosión)

8.5.1.1 Descripción general y conocimiento básico de la teoría de conjuntos (énfasis)
(1) Descripción general de la morfología matemática Morfología
: generalmente se refiere a una rama de la biología que estudia la estructura de animales y plantas.
La morfología matemática (también conocida como álgebra de imágenes) representa una herramienta matemática para analizar imágenes basadas en la morfología
La idea básica: utilizar elementos estructurales con una determinada forma para medir y extraer las formas correspondientes en la imagen para lograr el propósito de análisis y reconocimiento de la imagen.
La base matemática y el lenguaje del procesamiento de imágenes morfológicas es la teoría de conjuntos.
La aplicación del procesamiento de imágenes morfológicas puede simplificar los datos de la imagen, mantener sus características de forma básicas y eliminar estructuras irrelevantes.
Hay 4 operaciones básicas en el procesamiento de imágenes morfológicas: expansión, erosión, operación de apertura y operación de cierre.
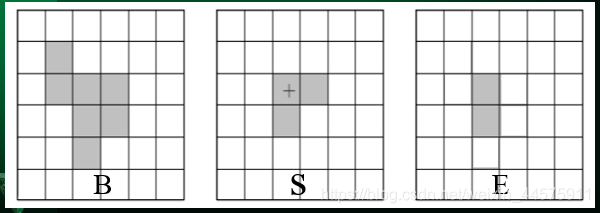
8.5.1.2 Dilatación
(1)
Expansión de la definición : expanda la imagen
B y S son dos conjuntos, B se define por la expansión S como:
D = B⊕S = {(x, y) | S (x, y) ∩ B ≠ ø}

ps: S (x, y) ∩B significa que cuando el punto central es (x, y), la intersección del elemento estructural S y la imagen original B no está vacía, o hay una intersección, entonces el punto central debe estar marcado como 1.
(2) Aplicación
Puenteando las grietas del texto
Ventajas: obtenga el resultado directamente en una imagen binaria, en comparación con el método de filtrado de paso bajo.
El papel de la expansión: conectar áreas vecinas; llenar pequeños agujeros en el área objetivo.
8.5.1.3 Corrosión
(1) Definición de
corrosión: para reducir la imagen,
B y S son dos conjuntos, B se define por S corrosión como:
E=B Θ S={ (x, y) | S(x, y) ⊆ B }
El conjunto S se llama elemento estructural
ps: S (x, y) ⊆ B es cuando el punto central es (x, y), el elemento estructural de S está íntegramente contenido en la imagen original B, así que marca el punto central (x, y) como 1
(2) Aplicación
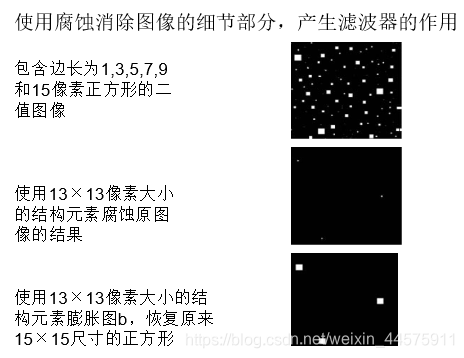
El papel de la corrosión en las operaciones morfológicas matemáticas es eliminar los puntos límite de los objetos.
Si el elemento estructural es un bloque de 3 × 3 píxeles, la erosión reducirá el límite del objeto en un píxel a lo largo de la periferia.
La corrosión puede eliminar objetos más pequeños que los elementos estructurales (rebabas, pequeñas protuberancias), de modo que al seleccionar elementos estructurales de diferentes tamaños, se pueden eliminar objetos de diferentes tamaños de la imagen original.
Si hay una pequeña conexión entre dos objetos, cuando el elemento estructural es lo suficientemente grande, los dos objetos pueden separarse mediante la operación de erosión.
8.5.1.4 Aplicación
Extracción de límites, relleno de regiones, componentes conectados, casco convexo, adelgazamiento, engrosamiento
8.5.2 Operación abierta y operación cerrada
8.5.2.1 Operación abierta
(1) Definición
El proceso de primera corrosión y luego expansión se denomina operación abierta.
(2) Función:
eliminar objetos pequeños, separar objetos en puntos delicados y suavizar los límites de objetos más grandes sin cambiar su área significativamente.
8.5.2.2 Operación cerrada
(1) Definición
El proceso de primera expansión y luego corrosión se denomina operación cerrada.
(2) Función:
llena pequeñas cavidades en objetos, conecta objetos vecinos y suaviza sus límites sin cambiar su área significativamente.
8.5.3 Algoritmo de aplicación de morfología matemática
8.5.3.1 Extracción de límites
Reste el resultado de la corrosión de la imagen original
(1) Defina
β (A) = A− (AΘB) La
fórmula anterior expresa: primero corroe A con B, luego resta la corrosión con A, y B es un elemento estructural
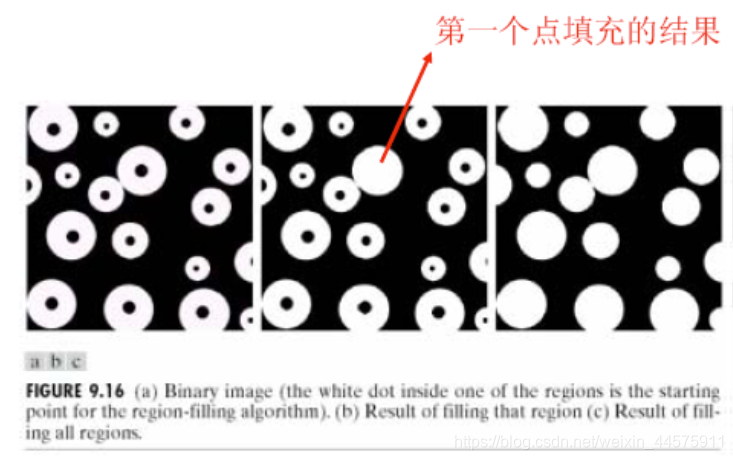
8.5.3.2 Relleno de área
(1) Definición
Definición: Establezca todos los puntos no fronterizos (de fondo) para que se marquen como 0, luego asigne 1 al punto p para

lograr el objetivo: comience desde un punto dentro del límite y llene toda el área con 1
X 0 = p, si X k = X k-1 , el algoritmo termina en el k-ésimo paso de la iteración. La unión de Xk y A incluye el conjunto relleno y su
expansión de condición de contorno : si no hay restricción en la parte izquierda de la fórmula anterior, la expansión de la fórmula anterior llenará toda el área. La intersección de Ac se usa para limitar el resultado a la región de interés para lograr la expansión condicional.
Al llenar el agujero, A es el área de fondo conectada con los cuatro bordes de la imagen.
(2) Ejemplo
Eliminar los puntos negros en el círculo blanco rellenando el área
pic=imread('circle.jpg');
BW1=im2bw(pic);%二值化
BW2=bwfill(BW1,'holes');%区域填充
imshow(BW2);%上图最右边那个就是效果图
8.5.3.3 Extracción de componentes conectados
Extracción del esqueleto (la adición y la re-corrosión se desconectarán, luego se unirán al esqueleto en este punto)