Detección de bucle invertido Corrección de bucle invertido (2): Principio de corrección de bucle invertido
1. Descripción general de la calibración de bucle invertido
Referencia: [1] Xu Kuan. Investigación sobre visión binocular SLAM fusionada con información de IMU [D]. Harbin Institute of Technology, 2018.
Lo que debe hacer la calibración de loopback es cómo usar la información de loopback para eliminar los errores acumulados. La corrección de bucle invertido se divide principalmente en dos pasos:
1. Primero, realice la fusión en bucle: la fusión en bucle consiste en fusionar los puntos del mapa asociados con los puntos de características que coinciden con la detección del bucle y eliminar los puntos de mapa duplicados.
2. Luego realice la corrección de pose del cuadro actual, y use la matriz básica obtenida por la detección de bucle para calcular la relación de conversión de pose entre el cuadro actual y el cuadro de bucle, y corrija la pose del cuadro actual.
3. Finalmente, realice la corrección de la postura de todos los cuadros y use BA (Ajuste de paquete, método de ajuste del haz) para corregir todas las posturas de la imagen en el bucle.

Segundo, varias fotos
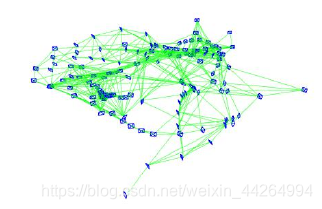
1. Vista común (Gráfico de Covisibilidad)
La vista común es un gráfico ponderado no dirigido. Cada vértice del gráfico representa el estado de la cámara en un momento determinado, es decir, la pose. El borde del gráfico conecta dos vértices, lo que indica la relación de transformación entre las poses de la cámara en estos dos estados. Cuando dos cámaras ven puntos espaciales similares, se conectarán sus poses correspondientes (podemos calcular el movimiento entre las dos cámaras en función de la proyección de estos puntos espaciales en la foto). Según el número de puntos espaciales observados, se agrega un peso a este borde para medir la credibilidad de este borde. Como se muestra en la figura, es una vista común, donde el vértice azul representa el punto de estado de la cámara y la línea verde conecta los dos vértices azules, lo que indica la relación de transformación de la pose de la cámara en estos dos momentos.
2. Gráfico esencial
El gráfico esencial es un concepto propuesto por ORB-SLAM, que reduce el número de bordes tanto como sea posible, reduciendo así la cantidad de cálculo del loopback global. Porque, si los dos vértices en la vista común pueden observar más puntos de mapa juntos (evaluar el movimiento en función de los puntos de mapa comunes), significa que tienen una relación de conexión más fuerte. Por lo tanto, con esta función, se pueden simplificar algunas vistas comunes para obtener la imagen esencial. El proceso específico es el siguiente:
Establezca un umbral apropiado. Si el número de puntos del mapa que pueden observar dos vértices es mayor que este umbral, el borde entre ellos se guardará, de lo contrario se rechazará. Sin embargo, si se eliminan todos los vértices de un grupo y los bordes de otro grupo de vértices, los dos grupos de vértices se optimizarán por separado al optimizar, y la pose del grupo de cámaras que no contiene la información de bucle invertido no Está optimizado, lo que es indeseable. Por lo tanto, antes de excluir los bordes de la relación de conexión débil, primero construya un árbol de expansión de la vista común original, y luego elimine algunos bordes innecesarios sobre esta base, de modo que el resultado final sea también un árbol de expansión de la vista común original y los vértices La mayoría de ellos pueden observar un número suficiente de puntos del mapa. La corrección de bucle se lleva a cabo en el mapa de esencia (ORB-SLAM).
三 、 BA (Ajuste de paquete)
Referencia: Ajuste de paquete, es decir, para minimizar los errores de reproyección
BA, Ajuste de paquete, traducido como método de ajuste de haz, su esencia es un modelo de optimización, el propósito es minimizar el error de reproyección.
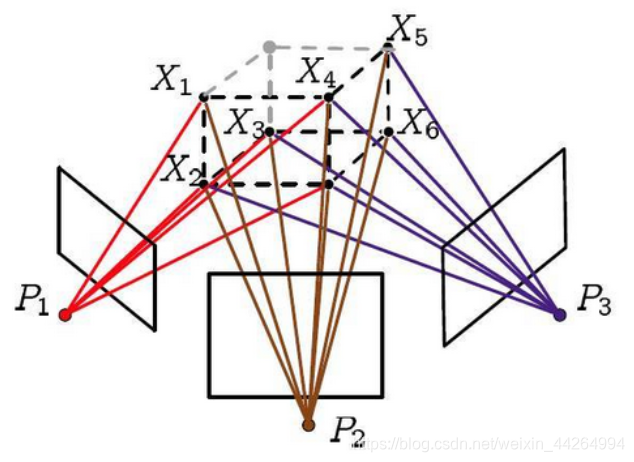
Haz
El haz de luz se refiere al haz de luz proyectado desde un punto en el espacio tridimensional en el plano de la imagen, y el error de reproyección se construye utilizando estos haces de luz, por lo que se llama método de haz, enfatizando que el haz de luz también describe cómo se establece el modelo de optimización.
Ajuste
Al medir, para reducir el error de medición tanto como sea posible, el número de observaciones es a menudo más que el número que debe observarse para determinar la cantidad desconocida, es decir, para hacer observaciones redundantes. Con observaciones redundantes, inevitablemente habrá contradicciones entre los resultados de la observación. El propósito del ajuste de la medición es eliminar estas contradicciones para obtener los resultados más confiables de las mediciones de observación y evaluar la precisión de los resultados de la medición. El principio utilizado para el ajuste es "mínimos cuadrados".
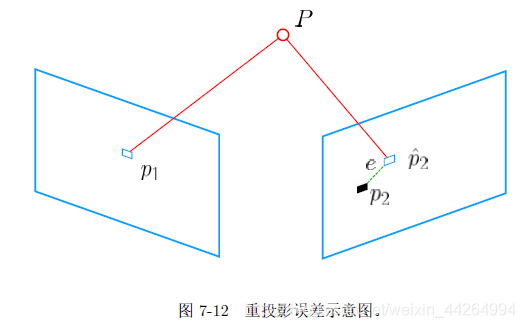
Error de reproyección
La reproyección se refiere a la segunda proyección:
La primera proyección: se refiere al punto de proyección del punto espacial tridimensional real en el plano de la imagen cuando la cámara está tomando una foto; la
segunda proyección (re-proyección): primero usamos la imagen para calcular algunos fotogramas por geometría polar Movimiento de la cámara entre imágenes. Después de obtener el movimiento de la cámara, la posición espacial del punto característica se estima mediante triangulación. Luego use las coordenadas del punto tridimensional que calculamos (tenga en cuenta que no es real) y la posición de la cámara que calculamos (por supuesto que no es cierto) para realizar la segunda proyección, es decir, la nueva proyección.
La diferencia entre la proyección de un punto espacial tridimensional real en el plano de la imagen (es decir, el punto de píxel en la imagen) y la reproyección (en realidad un punto de píxel virtual obtenido de nuestro cálculo) es el error de reproyección.
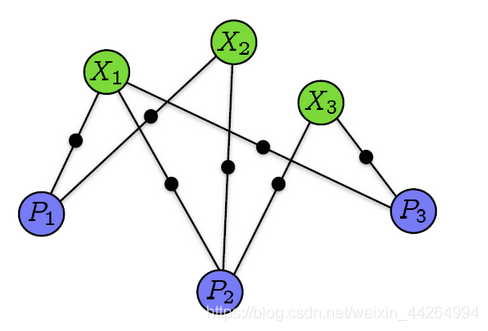
BA
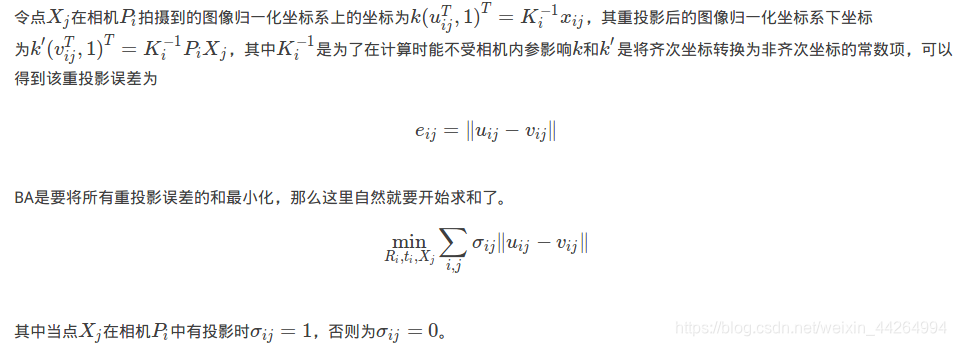
1. Construir la función de error
BA es un modelo de optimización de gráficos, como sigue:

2. Optimización no lineal
El proceso de optimización no lineal consiste en utilizar un algoritmo para optimizar la postura de la cámara para minimizar la función de error.
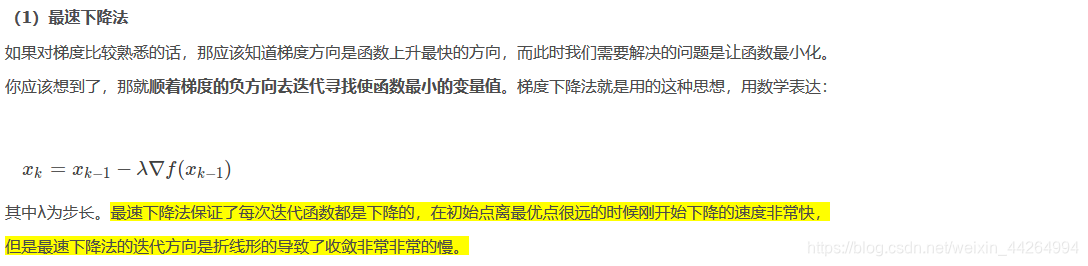
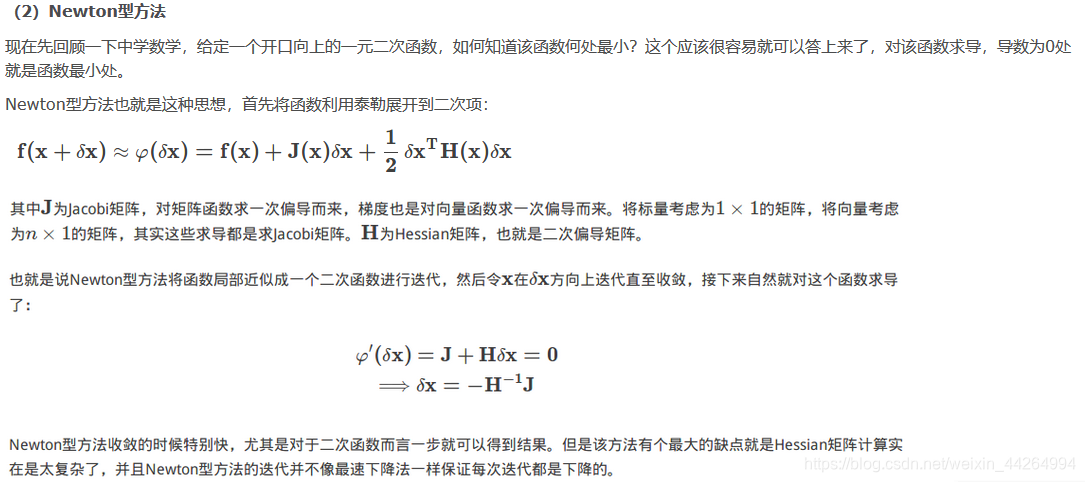
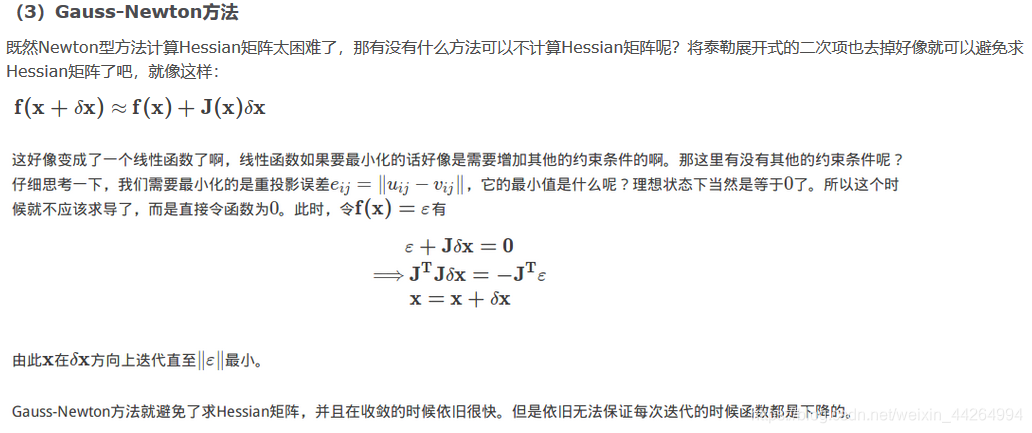
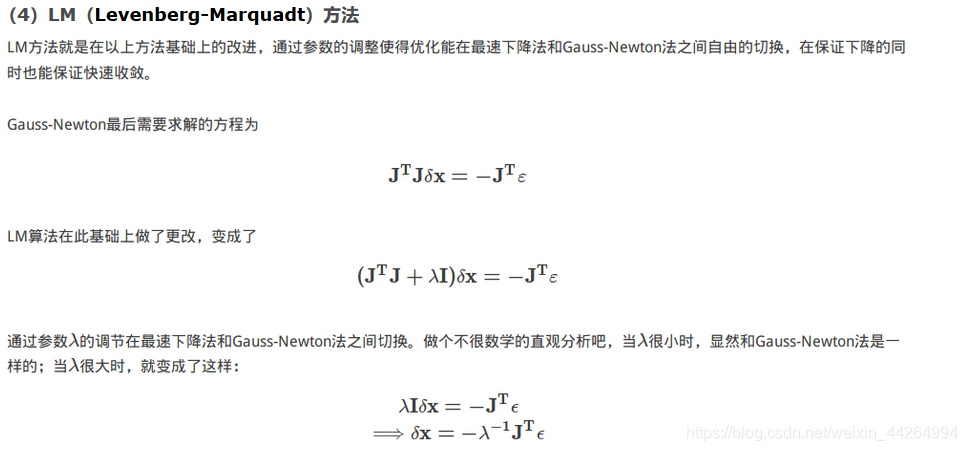
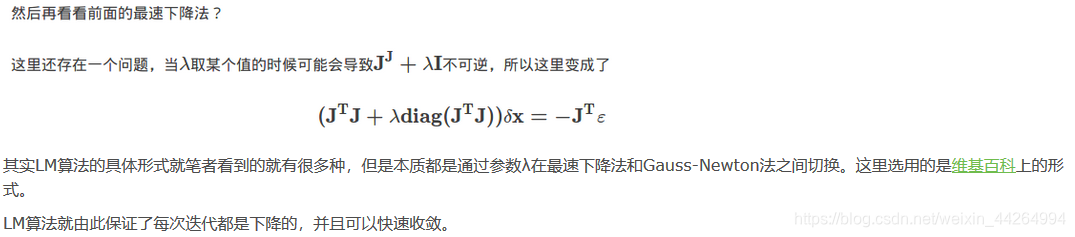 BA utiliza básicamente el algoritmo LM (Levenberg-Marquardt) y, basándose en este cálculo utilizando la naturaleza dispersa del modelo BA, el algoritmo LM es el más rápido La combinación del método de descenso (método de descenso de gradiente) y Gauss-Newton.
BA utiliza básicamente el algoritmo LM (Levenberg-Marquardt) y, basándose en este cálculo utilizando la naturaleza dispersa del modelo BA, el algoritmo LM es el más rápido La combinación del método de descenso (método de descenso de gradiente) y Gauss-Newton.
