I found a lot of resources on the Internet, all using the zed_ros_wrapper library
But I do n’t know if it ’s the cause of the second count, and the compilation has been unsuccessful (there are no related errors on the Internet, as if I have encountered this problem all over the world, 嘤 嘤 嘤)
Looking hard again, finally! ! Found another library! ! zed_cpu_ros
Through the launch file in this package, the camera can capture images separately, which can be used for calibration
Because the ros comes with the package for calibration, I will not talk about the method again. For details, see the camera calibration- ros comes with the function package
Later, I found another problem. The calibration of binocular camera is different from that of monocular.
In addition to the internal parameters of each camera, the dual target also has external parameters (rotation matrix, translation matrix) and eigen matrix
My twists and turns to mark the road (嘤 嘤 嘤
First, I found many ways, but. . . QAQ is not applicable
Then selected the calibration with MATLAB
I found that when I used the ros own function package to calibrate before, I automatically saved the picture and used it directly.
(This is also heartbreaking), from the magic calculation to copying to the computer with USB, all kinds of files are damaged, and clearly you can see the picture is to show that the number of the two folders on the left and right are different
Witty like me, first put the pictures into a single target package, only to find out. . The camera package on the right is damaged. . .
Then copy the file again, and then calibrate
Succeeded! ! half. . .
Because the ros function package does not capture the left and right camera images at the same time, and I use it directly, the error is as high as 200. . . . . Obviously the data is not available
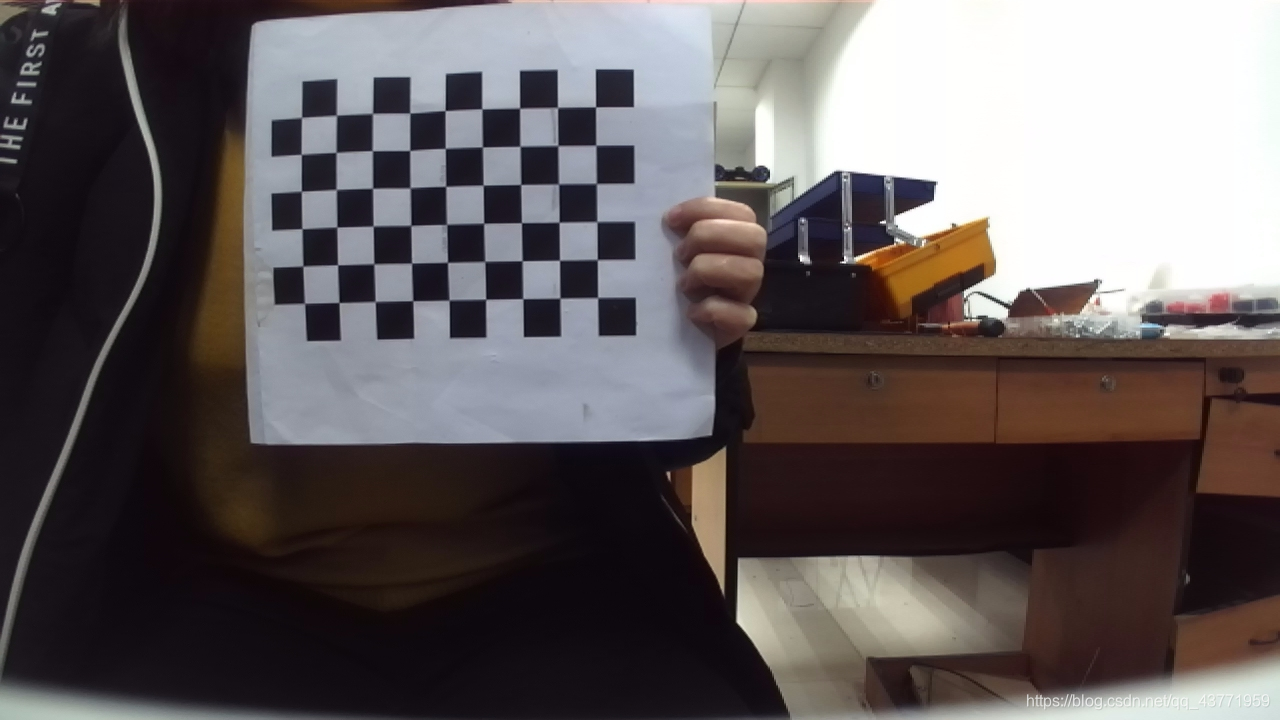
After that, I tried various ways to finally get the images captured at the same time (pictured)
Then I was naive again. . . After a series of failures (I will not talk about it, it's too bad hhhh)
I finally used MATLAB to cut and calibrate successfully, the error is 1
The editor for cutting images
The effect is as shown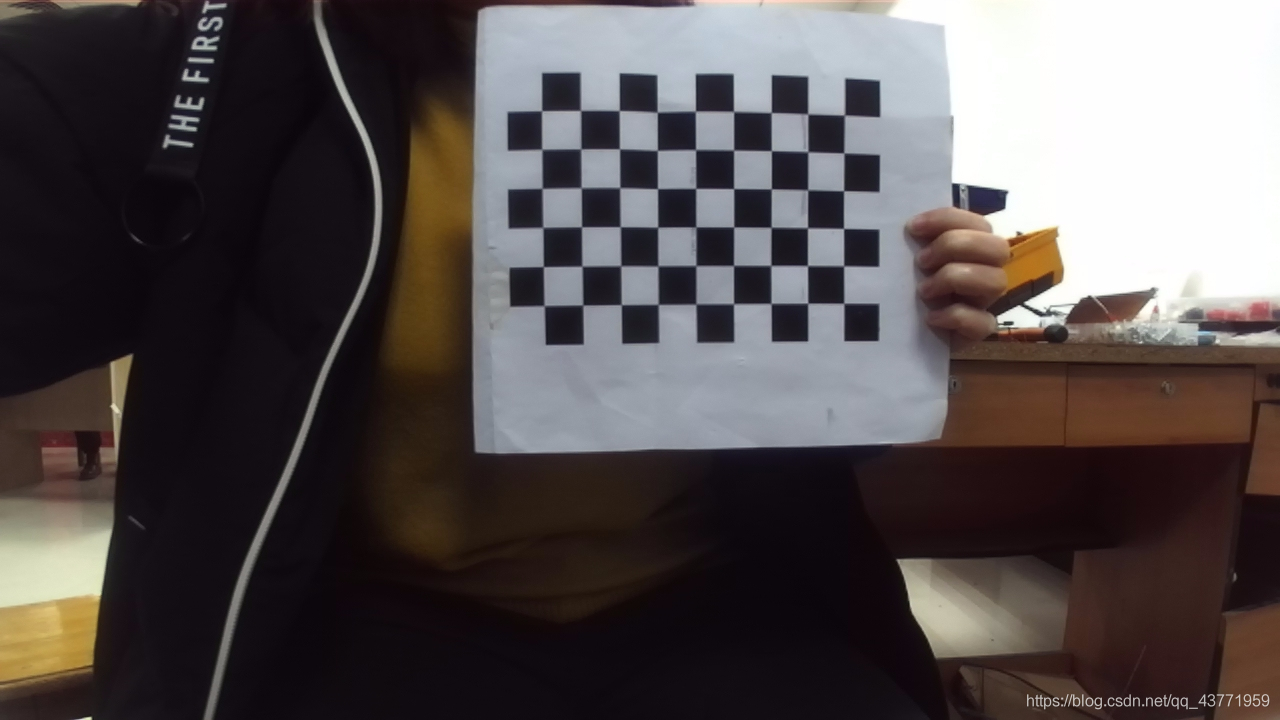
Find this calibration toolbox, follow the monocular MATLAB calibration process for everything else
You can get all the parameters

