Inhaltsverzeichnis
1. Konfiguration der Entwicklungsumgebung
1.2 Sinisierung des Systems und Installation der chinesischen Eingabemethode
1.2.1 Sinisierung des Systems (je nach Anforderung auswählen)
1.2.2 Installieren Sie die chinesische Eingabemethode
1.3 Ändern Sie die Off-Screen-Einstellung
1.4 Update-Quellen und einige Software (nur als Referenz)
2. Konfiguration der Python-Umgebung
2.2 Installieren Sie allgemeine Python-Pakete für maschinelles Lernen
2.3 OpenCV für Python konfigurieren
2.4.1 Laden Sie PyCharm herunter und konfigurieren Sie die Umgebung
3. Jetson Nano-Lernmaterialien (nur als Referenz)
Vorwort
Der grundlegende Konfigurationsprozess von Jetson Nano B01 wurde in der inländischen Version von Jetson Nano Learning Teil 1 vorgestellt und erläutert. In diesem Artikel werden weiterhin die Konfiguration der Entwicklungsumgebung der inländischen Version von Jetson Nano und der Betrieb seines Ubuntu 18.04- Systems erläutert.
1. Konfiguration der Entwicklungsumgebung
1.1 Vernetzung
Methode 1: (Router erforderlich)
Am einfachsten und bequemsten ist es, den Netzwerk-Port des Nano über ein Netzwerkkabel mit dem LAN-Port des Routers zu verbinden, um eine Verbindung zum Internet herzustellen. Wenn es sich um ein Campus-Netzwerk (z. B. UGENT) handelt, ist es etwas Besonderes und Sie müssen eine IP für dieses mobile Gerät beantragen, bevor es verwendet werden kann. Andernfalls ist die Verbindung nicht erfolgreich. Bitte achten Sie darauf!

Methode 2: (kostengünstig, einfach zu testen und zu verwenden)
Kaufen Sie eine 360USB-WLAN-Karte, ein WLAN-Modul usw. und fungieren Sie als USB-WLAN-Karte für das WLAN-Motherboard, um Mobiltelefon-Hotspots und WLAN zu verbinden.


Methode 3: Installieren Sie eine drahtlose Netzwerkkarte
Das Nano-Motherboard verfügt über eine M.2 Key E-Schnittstelle, die an eine externe drahtlose Netzwerkkarte angeschlossen werden kann. Beachten Sie, dass diese Schnittstelle nur an eine drahtlose Netzwerkkarte angeschlossen werden kann. Die Kosten betragen etwa 100 RMB. Die Installation ist relativ einfach und Die meisten Geschäfte verkaufen es.
1.2 Sinisierung des Systems und Installation der chinesischen Eingabemethode
1.2.1 Sinisierung des Systems (je nach Anforderung auswählen)
1. Öffnen Sie zuerst die Ubuntu-Einstellung (Einstellungen), klicken Sie auf das Dreieck in der oberen rechten Ecke und dann auf das Schraubenschlüsselsymbol; oder klicken Sie auf die untere linke Ecke und suchen Sie die Einstellungen auf der rechten Seite, wie in der Abbildung unten gezeigt (in beide Richtungen). können kombiniert werden, um die Einstellungen zu öffnen).

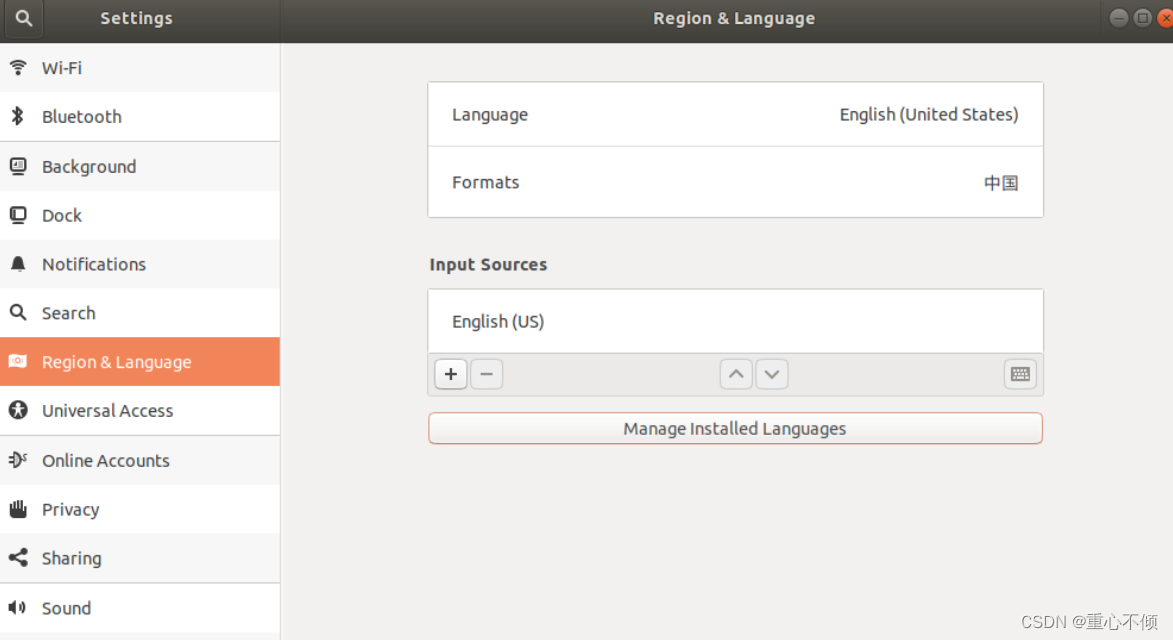
2. Klicken Sie dann im Einstellungsdialogfeld auf [Region & Sprache] – [Installierte Sprachen verwalten], wie in der Abbildung unten gezeigt.
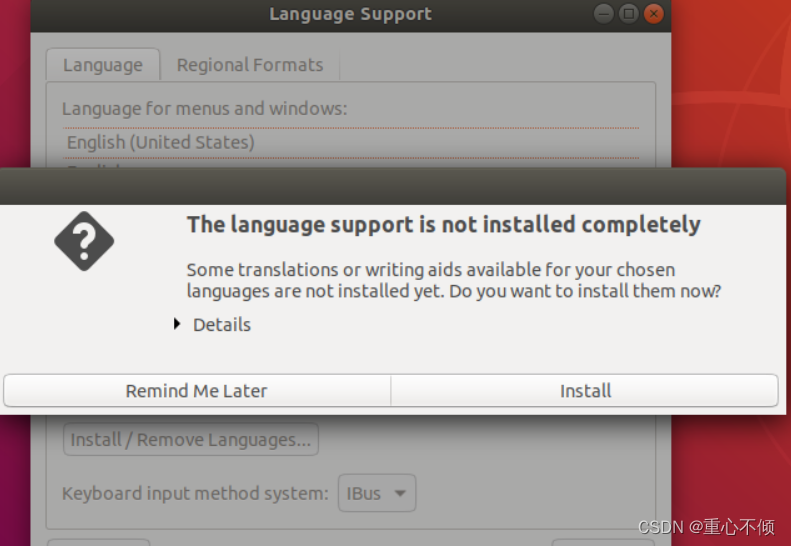
3. Klicken Sie im Popup-Fenster auf [Installieren], um den Vorgang einzurichten. Sie müssen das Sprachpaket herunterladen und mit dem Internet verbunden sein, um die Ubuntu-Sprache zu installieren , wie in der Abbildung unten gezeigt.
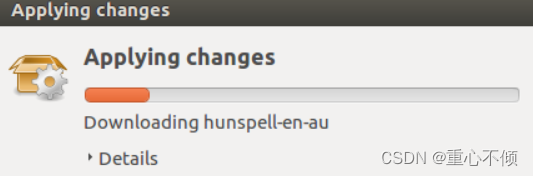
4. Dann erscheint ein Eingabefeld. Geben Sie das Passwort ein, um sich beim System anzumelden, und klicken Sie auf [Authentifizieren]. Anschließend beginnt das System mit dem Herunterladen und Installieren des Sprachpakets und wartet, bis die Installation abgeschlossen ist.
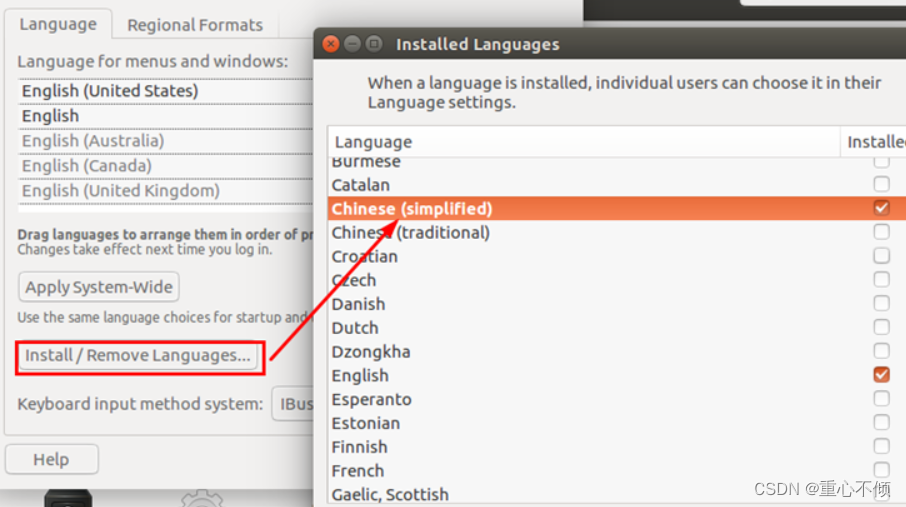
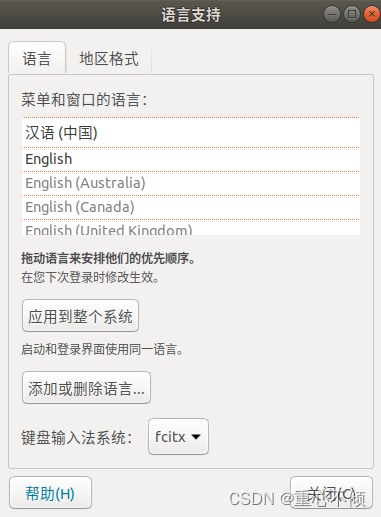
5. Nachdem das Sprachpaket heruntergeladen wurde, klicken Sie auf [Sprache installieren/entfernen], um „Chinesisch (vereinfacht)“ hinzuzufügen, wie in der Abbildung unten gezeigt.
6. Wählen Sie „Übernehmen“ und warten Sie, bis die Installation des Sprachpakets abgeschlossen ist. Ziehen Sie nach Abschluss der Installation unbedingt „Chinesisch (China)“ nach oben und beenden Sie den Vorgang. Folgendermaßen:
Starten Sie anschließend das System neu. Nach dem Neustart wird ein Eingabeaufforderungsfeld angezeigt, in dem Sie gefragt werden, ob einige Verzeichnisse in chinesische Namen geändert werden sollen. Programmentwickler empfehlen, das System nicht zu sinisieren.
1.2.2 Installieren Sie die chinesische Eingabemethode
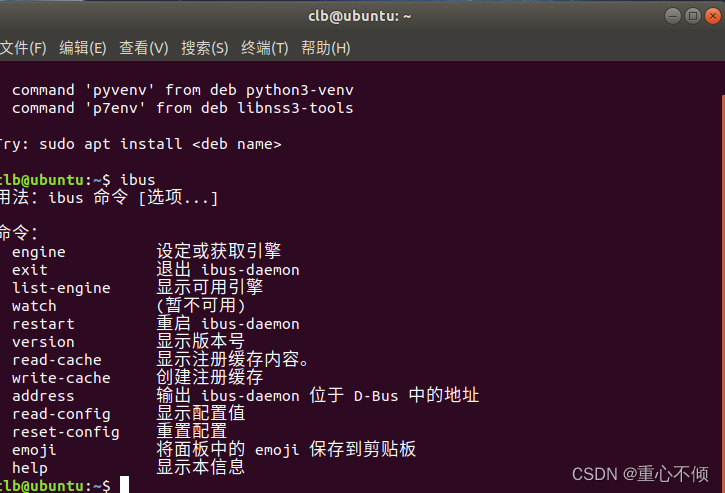
Da es während des Entwicklungsprozesses häufig erforderlich ist, die chinesische Suche zu verwenden und die erforderlichen chinesischen Kommentare zu verfassen, wird empfohlen, eine chinesische Eingabemethode für das System zu installieren. Jetson Nano verfügt über eine eigene ibus-Eingabemethode für Chinesisch, erfordert jedoch eine einfache Konfiguration für die Eingabe von Chinesisch. Geben Sie den Befehl ibus direkt in das Terminal ein . Die in der folgenden Abbildung gezeigte Schnittstelle wird angezeigt. Dies zeigt an, dass Jetson Nano über eine eigene ibus-Eingabemethodenumgebung verfügt.
Laden Sie unten die Pinyin-Eingabemethode für ibus herunter und geben Sie den Befehl ein:
sudo apt-get install ibus-pinyin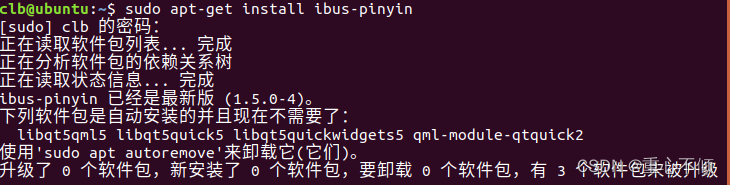
Der obige Download und die Installation sollten etwa fünf Minuten dauern. Rufen Sie nach Abschluss der Installation die Systemkonfigurationsoberfläche „Systemeinstellungen“ auf
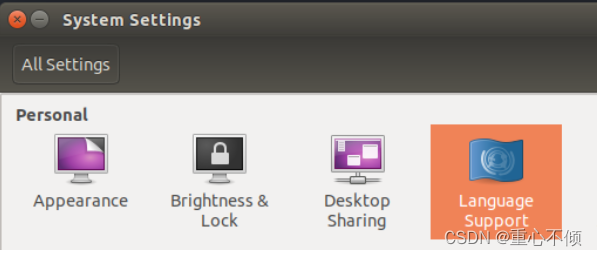
Wählen Sie die Sprachunterstützungsoption „Sprachunterstützung“ und dann die Schnittstelle [Sprache hinzufügen oder löschen] aus. Das System wählt dann die Sprachunterstützung aus, wie in der folgenden Abbildung dargestellt:

Wählen Sie hier „Chinesisch vereinfacht“ und klicken Sie auf „Übernehmen“. Dieser Apply-Prozess installiert eine Reihe chinesischer Sprachpakete, wie in der folgenden Abbildung dargestellt:

Stellen Sie nach Abschluss der Installation Chinesisch auf der Sprachunterstützungsoberfläche in den Vordergrund, wie in der folgenden Abbildung dargestellt:

Klicken Sie dann auf „Auf gesamtes System anwenden“. Ändern Sie abschließend das „Tastatureingabemethodensystem“ in iBus .
Starten Sie das System neu und geben Sie dann den folgenden Befehl in das Terminal ein, um die ibus-Konfigurationsoberfläche aufzurufen:
ibus-setupKlicken Sie in der Konfigurationsoberfläche auf die Schaltfläche „Hinzufügen“, erweitern Sie dann die Option „Chinesisch“ und wählen Sie [Chinesisch-intelligentes Pinyin]. Wenn Sie die Option „Chinesisch“ hier nicht finden, können Sie den Computer herunterfahren, neu starten und dann erneut suchen.
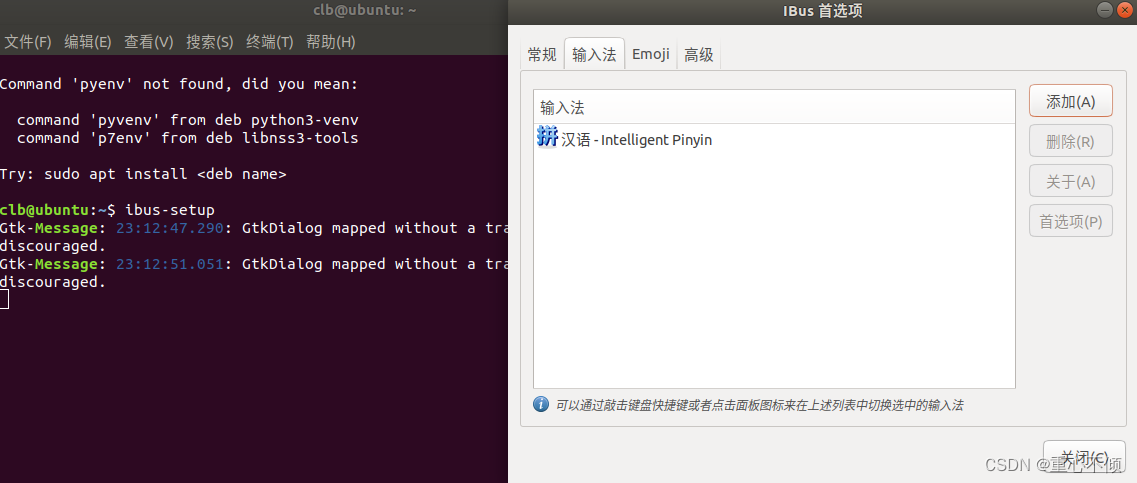
Geben Sie nach Abschluss des Hinzufügens den folgenden Befehl ein, um ibus neu zu starten und den Vorgang abzuschließen.
ibus restartStellen Sie abschließend die Eingabemethode in der oberen Taskleiste des Desktops auf die Pinyin-Eingabemethode Pi um, und Sie können zu diesem Zeitpunkt die chinesische Eingabe verwenden.
1.3 Ändern Sie die Off-Screen-Einstellung
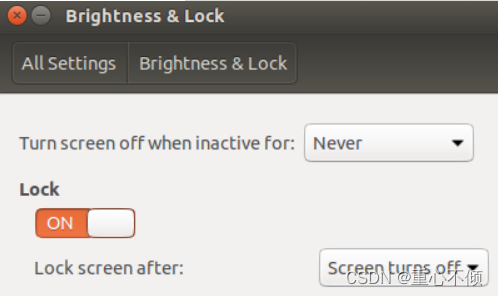
Standardmäßig ist der Jetson Nano so eingestellt, dass er den Bildschirm automatisch ausschaltet, wenn innerhalb von 5 Minuten keine Bedienung erfolgt, und Sie müssen das Einschaltkennwort erneut eingeben, um den Bildschirm neu zu starten. Da wir während der Entwicklung von Jetson Nano oft warten müssen, ist es für unseren Entwicklungsbetrieb praktisch, den Bildschirm nicht auszuschalten.
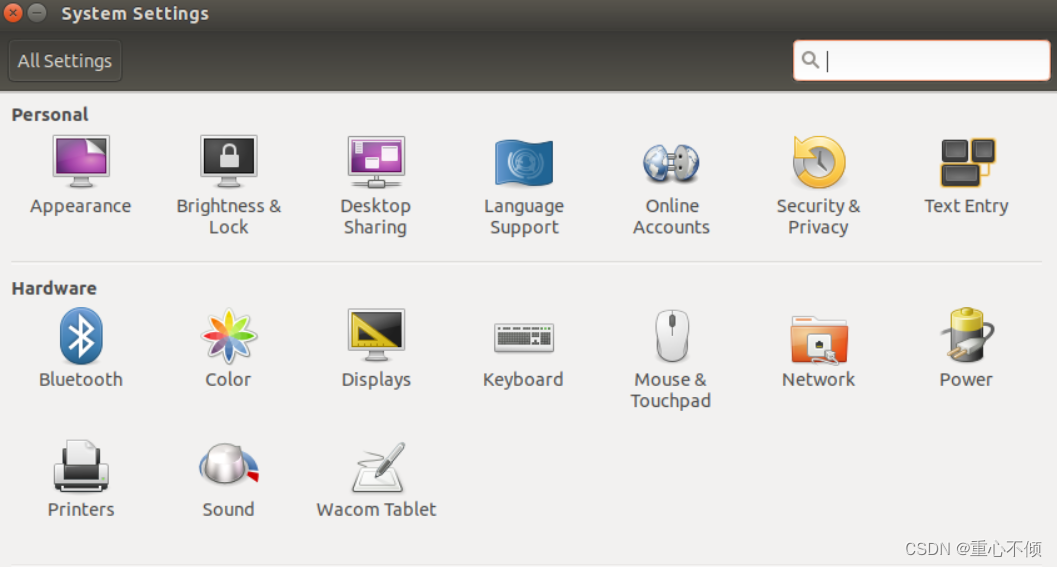
Öffnen Sie die Systemeinstellungen , um die Systemeinstellungsoberfläche aufzurufen, wie in der folgenden Abbildung dargestellt:
Klicken Sie auf „Helligkeit & Sperren“ und ändern Sie dann „ Bildschirm bei Inaktivität ausschalten für“ in „Nie“ , wie in der folgenden Abbildung dargestellt:
1.4 Update-Quellen und einige Software (nur als Referenz)
Nach der Installation des Systems sollte zunächst die Quelle aktualisiert werden, da nachfolgende Updates und Upgrades sonst sehr langsam erfolgen. Da Jetson Nano jedoch das Ubuntu 18.04.2 LTS-System mit aarch64-Architektur verwendet, das sich vom Ubuntu-System mit AMD-Architektur unterscheidet, muss es durch die Quelle von aarch64 ersetzt werden. Achten Sie darauf, es nicht durch die Quelle von x86 zu ersetzen -64 .
In diesem Artikel wird die Quelle der Tsinghua-Universität zur Aktualisierung ausgewählt. Sichern Sie zunächst die Originalquelle und ändern Sie den Namen der Datei „source.list“:
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
sudo gedit /etc/apt/sources.listDann alles löschen, folgendes kopieren:
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main multiverse restricted universeDamit ist die Quelländerung abgeschlossen. Öffnen Sie dann das Terminal und geben Sie zum Aktualisieren den folgenden Befehl ein:
sudo apt-get update
sudo apt-get full-upgradeDas obige Update dauert lange und kann aufgrund der Geschwindigkeit des Netzwerks fehlschlagen. Fahren Sie zu diesem Zeitpunkt nicht herunter, sondern führen Sie den Befehl einfach erneut aus.
2. Konfiguration der Python-Umgebung
2.1 Pip installieren
Die Python 3.6- Version wurde in Jetson Nano vorinstalliert , sodass Sie pip direkt installieren können.
Geben Sie zur Installation den folgenden Befehl in das Terminal ein:
sudo apt-get install python3-pip python3-devNach Abschluss der Installation ist der Pip zu diesem Zeitpunkt Version 9.01. Sie müssen Pip aktualisieren, da sonst bei der späteren Installation anderer Python-Bibliotheken Probleme auftreten. Der Upgrade-Befehl lautet wie folgt:
python3 -m pip install --upgrade pipZu diesem Zeitpunkt ist die aktualisierte Pip-Version 19.0.3 . Obwohl das Upgrade abgeschlossen ist, gibt es in pip3 einen kleinen Fehler, der zu diesem Zeitpunkt manuell behoben werden muss. Öffnen Sie zunächst die pip3-Datei mit dem folgenden Befehl:
sudo vim /usr/bin/pip3Geben Sie das Zeichen a über die Tastatur ein, um in den Einfügemodus zu gelangen. Anschließend können Sie mit der Bearbeitung der Datei beginnen. Das ursprüngliche Codefeld lautet wie folgt:
from pip import main
if __name__ == '__main__':
sys.exit(main())Ändern Sie wie folgt:
from pip import __main__
if __name__ == '__main__':
sys.exit(__main__._main())Drücken Sie dann die Esc-Taste, um in den Befehlsmodus zu gelangen. Drücken Sie abschließend die englische :-Taste, um in den letzten Zeilenmodus zu gelangen, geben Sie wq ein und drücken Sie die Eingabetaste , um die Änderung zu speichern und den Editor zu verlassen.
Nach der Änderung speichern. Führen Sie pip3 -V aus, um zu sehen, ob es erfolgreich ist.
pip3 -V
2.2 Installieren Sie allgemeine Python-Pakete für maschinelles Lernen
Geben Sie den folgenden Befehl ein, um die Installation abzuschließen:
sudo apt-get install python3-numpy
sudo apt-get install python3-scipy
sudo apt-get install python3-pandas
sudo apt-get install python3-matplotlib
sudo apt-get install python3-sklearn
sudo pip3 install keras2.3 OpenCV für Python konfigurieren
Es gibt zwei Möglichkeiten, opencv unter Python zu installieren. Eine besteht darin, den Opencv-Quellcode herunterzuladen und neu zu kompilieren, um das entsprechende Python-Paket zu generieren, und das Paket dann in den Pfad des Python-Installationspakets zu kopieren. Die andere besteht darin, den Befehl sudo pip3 install python3-opencv direkt zu verwenden . Es ist zu beachten, dass die zweite Methode im Wesentlichen das kompilierte OpenCV-Paket installiert und seine OpenCV-Version fest ist . Wenn Sie das neueste OpenCV verwenden möchten, ist die zweite Methode nicht geeignet. In diesem Artikel wird die erste Methode zur Installation verwendet.
Opencv wurde im Originalbild vorinstalliert. Mit dem folgenden Befehl können Sie die aktuelle Opencv-Versionsnummer anzeigen:
opencv_versionDaher müssen wir es nicht neu kompilieren, sondern können es einfach direkt verwenden. Das Ausgabeergebnis ist wie folgt:
![]()
2.4 PyCharm installieren
PyCharm ist eine Python- IDE (Integrated Development Environment, integrierte Entwicklungsumgebung) mit einer Reihe von Tools, mit denen Benutzer ihre Effizienz bei der Entwicklung in der Python- Sprache verbessern können, z. B. Debuggen , Syntaxhervorhebung , Projektmanagement , Codesprung, intelligente Eingabeaufforderungen und automatische Vervollständigung , Unit-Tests , Versionskontrolle . Darüber hinaus bietet die IDE erweiterte Funktionen zur Unterstützung der professionellen Webentwicklung unter dem Django- Framework . (von Baidu)
Pycharm ist eine sehr gute Codebearbeitungs-, Debugging- und Entwicklungssoftware. Normalerweise verwende ich gerne Pycharm, wenn ich das Programmieren auf einem Windows-System lerne. In diesem Artikel wird die Installation von Pycharm auf Jetson Nano vorgestellt.
2.4.1 Laden Sie PyCharm herunter und konfigurieren Sie die Umgebung
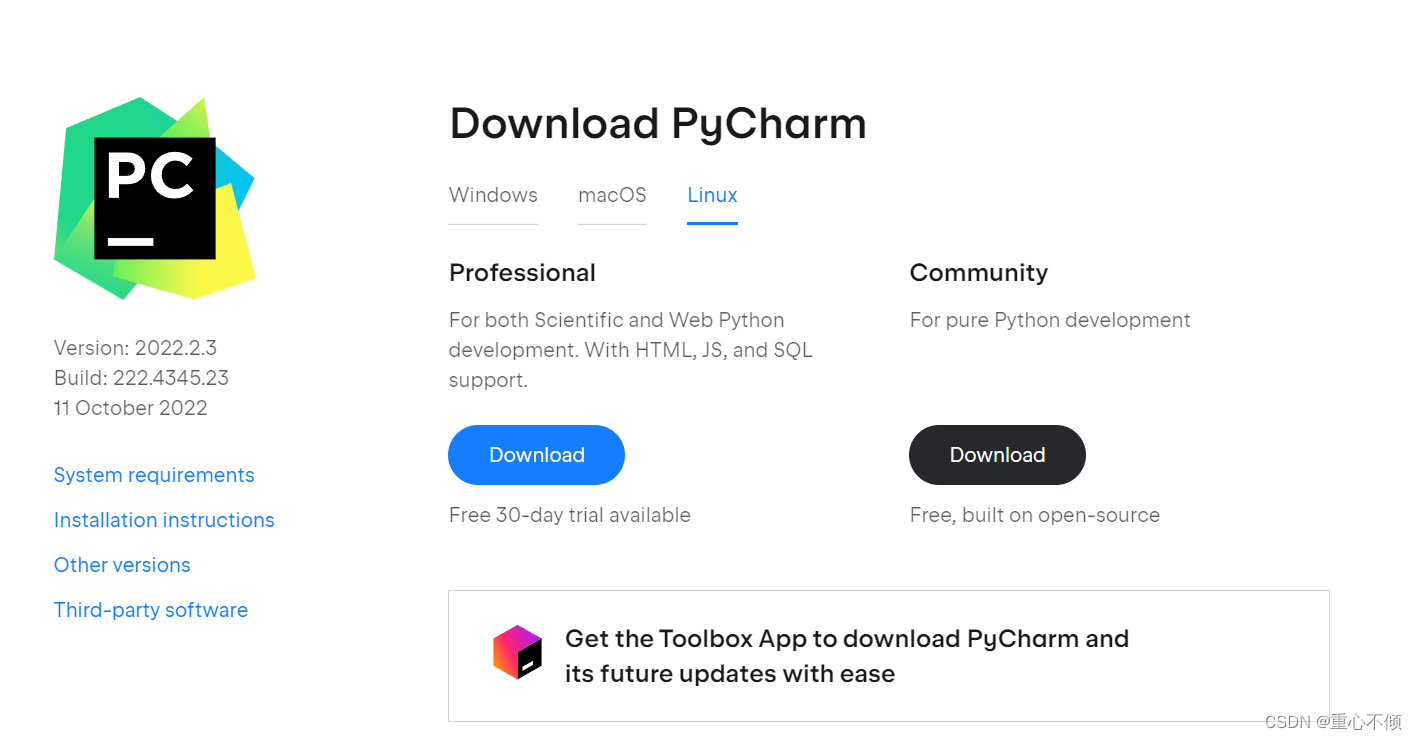
1. Im Allgemeinen reicht die Pycharm-Community-Version für die Verwendung aus und verfügt über grundlegende Bearbeitungs-, Debugging- und Ausführungsfunktionen. Wir können auf die offizielle Website gehen, um Pycharm herunterzuladen .
Wählen Sie die Linux-Community-Version zum Herunterladen aus.
2. Jetson Nano muss jdk vor der Installation von pycharm installieren , da es sich um ein Gerät mit Armarchitektur handelt . Führen Sie daher den folgenden Befehl aus:
sudo apt-get install openjdk-11-jdk3. Geben Sie nach Abschluss der Installation den folgenden Befehl ein, um die Java-Version zu überprüfen:
java --versionWie im Bild gezeigt:

Geben Sie dann den folgenden Befehl ein:
which javaWie nachfolgend dargestellt:

4. Konfigurieren Sie die Umgebungsvariable, öffnen Sie die Datei ~/.bashrc, fügen Sie den folgenden Inhalt hinzu und aktualisieren Sie die Umgebungsvariable:
sudo vim ~/.bashrcsource ~/.bashrc2.4.2 PyCharm installieren
1. In diesem Artikel wird pycharm-community-2022.2.3 als Beispiel verwendet. Geben Sie den Pfad ein, in dem sich pychram.sh befindet, und führen Sie die Installation aus.
Entpacken Sie das von der offiziellen Website heruntergeladene Installationspaket in eine Datei und speichern Sie es an einem bestimmten Ort (merken Sie sich unbedingt den Pfad, in dem die Pycharm-Datei gespeichert ist). Geben Sie den folgenden Befehl in die Befehlszeile ein (der Inhalt dieses Befehls dient nur als Referenz, Sie können Ihre eigene Installationsversion und Ihren eigenen Installationspfad entsprechend diesem Format ändern), um den Pfad des Pycharm-Installationspakets zu öffnen:
cd /home/xxx/Downloads/pycharm-community-2022.2.3/binGeben Sie dann den folgenden Befehl ein:
sh ./pycharm.shZu diesem Zeitpunkt ist die Installation von Pycharn abgeschlossen.
2. Es ist sehr umständlich, bei jedem Öffnen Befehle auszuführen. Wir können eine Desktop-Verknüpfung erstellen. Öffnen Sie ein Terminal auf dem Desktop:
gedit pycharm.desktopDas endgültige Bild ist wie folgt:

3. Jetson Nano-Lernmaterialien (nur als Referenz)
4. Zusammenfassung
In diesem Artikel werden einige Umgebungskonfigurationen der inländischen Version von Jetson Nano vorgestellt und erläutert, wie die Python-Umgebung auf Jetson Nano konfiguriert wird. Durch die weitere Entwicklung und das Lernen werden die Notizen weiterhin aktualisiert, und interessierte Freunde können weiterhin aufmerksam sein! Herzlich willkommen zum Diskutieren und Austauschen! ! !