博主github:https://github.com/MichaelBeechan
博主CSDN:https://blog.csdn.net/u011344545
GPS定位的基本原理是,测量出已知位置的卫星到地面GPS接收器之间的距离,然后接收器通过与至少4颗卫星通讯,计算与这些卫星间的距离,就能确定其在地球上的具体位置。普通GPS的定位精度 ≥ 1米,信号误差有50%的概率会达到2米以上。这一点被手机GPS导航坑过的人肯定有所体会。另外,GPS无法支持精准定高,误差可能高达十几米。
那么,GPS定位误差是怎么产生的呢?
1、大气层影响:大气层中的电离层和对流层对电磁波的折射效应,使得GPS信号的传播速度发生变化,从而让GPS信号产生延迟。
2、卫星星历误差:由于卫星运行中受到复杂的外力作用,而地面控制站和接收终端无法测定和掌握其规律,从而无法消除产生的误差。
3、卫星钟差:卫星钟差是指GPS卫星时钟与GPS标准时间的差别。卫星上使用铯原子钟,所以两者的时间也许不同步,就像你的手表跟你家客厅挂钟的时间不同步一样
4、多路径效应:GPS信号也有可能是在不同的障碍物上反射后才被接收到,这就是所谓的“多路径效应”。
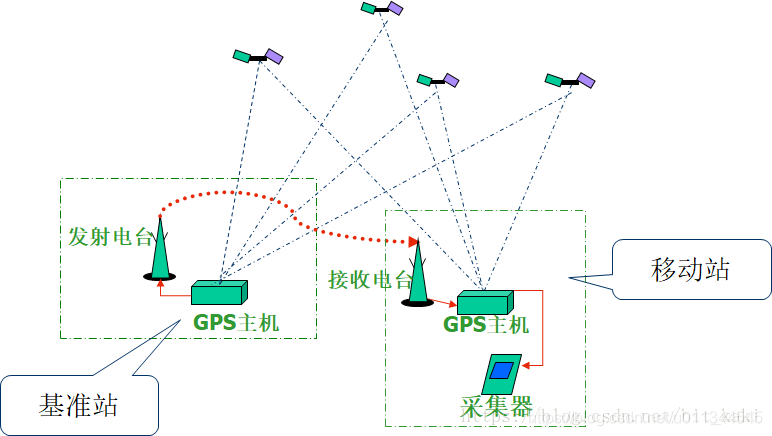
RTK (Real Time Kinematic), 即载波相位差分技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。在RTK作业模式下,基站采集卫星数据,并通过数据链将其观测值和站点坐标信息一起传送给移动站,而移动站通过对所采集到的卫星数据和接收到的数据链进行实时载波相位差分处理(历时不足一秒),得出厘米级的定位结果。
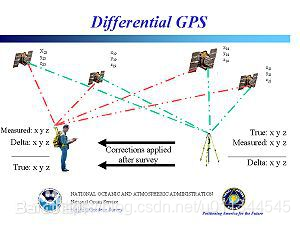
**差分GPS(differential GPS-DGPS,DGPS)**是首先利用已知精确三维坐标的差分GPS基准台,求得伪距修正量或位置修正量,再将这个修正量实时或事后发送给用户(GPS导航仪),对用户的测量数据进行修正,以提高GPS定位精度。
实现载波相位差分GPS的方法分为两类:修正法和差分法。前者与伪距差分相同,基准站将载波相位修正量发送给用户站,以改正其载波相位,然后求解坐标。后者将基准站采集的载波相位发送给 用户台进行求差解算坐标。前者为准RTK技术,后者为真正的RTK技术。
