旋转编码器是将旋转机械位移量转换为电器信号,对该信号进行处理后检测位置,速度等的传感器
旋转编码器可分为 “增量式”编码器和 “绝对值”式编码器
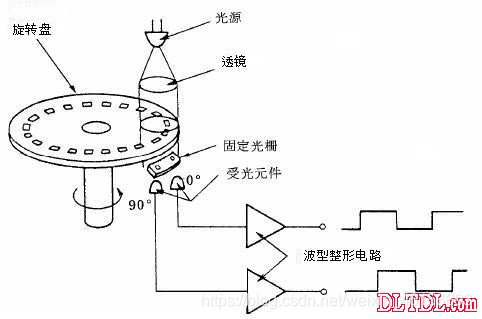
1.增量式编码器
旋转盘转动时,光敏二极管断续收到发光二极管发出的光,从而输出方波
增量式编码器通过对产生的方波脉冲进行计数来检测角度,增量式编码器有3个相分别为 A相 B相 Z相
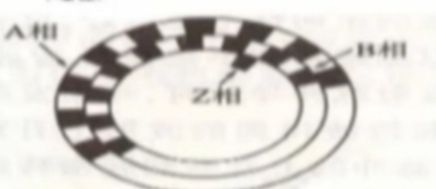
正转时A相超前B相90°,反之反转时B相超前A相90°
通过判断AB相的位置可以判断编码器的正反转
Z相则为原点信号,通过记录Z相可以记录转盘转动的圈数
通过对3相的记录则可达到记录转盘转动的角度
每转一个刻度AB相输出一个脉冲(转一圈会一个脉冲产生很多脉冲,具体由编码器型号决定),每转一圈Z相输出一个脉冲
2.绝对值式编码器
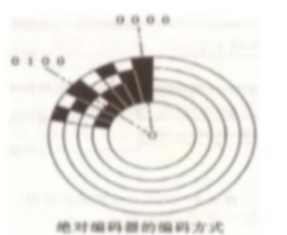
绝对值式编码器的每一相都有固定的二进制编码,故无需掉电记忆,无需找参考点(常用于定位控制)
绝对值编码器通过输出的二进制编码来检测旋转角度,检测的角度是绝对角度
stm32与编码器应用
在STM32中,编码器使用的是定时器接口,通过数据手册可知,定时器1,2,3,4,5和8有编码器的功能,而其他没有。编码器输入信号TI1,TI2经过输入滤波,边沿检测产生TI1FP1,TI2FP2接到编码器模块,通过配置编码器的工作模式,即可以对编码器进行正向/反向计数。
STM32编码器的使用:打开时钟,配置接口,配置模式
正转向上计数,反转向下计数,方向在CR1的DIR位里
1.如果计数器只在TI2的边沿计数,则置TIMx_SMCR寄存器中的SMS=001;
2.如果只在TI1边沿计数,则置SMS=010;
3.如果计数器同时在TI1和TI2边沿计数,则置SMS=011
1.编码器有个转速上限,超过这个上限是不能正常工作的
这个是硬件的限制,原则上线数越多转速就越低
这点在选型时要注意,编码器的输出一般是开漏的
所以单片机的io一定要上拉输入状态.
2.定时器初始化好以后,任何时候CNT寄存器的值就是编码器的位置信息
正转他会加反转他会减这部分是不需要软件干预的
初始化时给的TIM_Period 值应该是码盘整圈的刻度值
在减溢出会自动修正为这个数.加超过此数值就回0.
TI1FP1和TI2FP2
是TI1和TI2在通过输入滤波器和极性控制后的信号;
如果没有滤波和变相,则TI1FP1=TI1,TI2FP2=TI2。
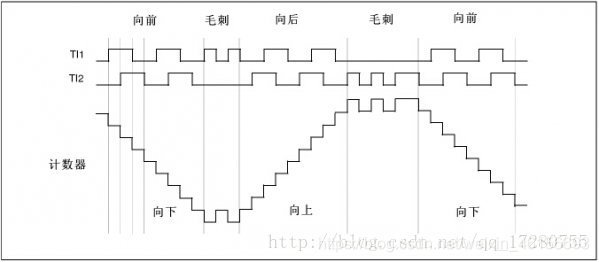
我们看到STM32的硬件编码器还是很智能的,当T1,T2脉冲是连续产生的时候计数器加一或减一一次,而当某个接口产生了毛刺或抖动,则计数器计数不变,也就是说该接口能够容许抖动。

