目标:
1.通过使用opencv获得不同物体的轮廓,以及轮廓所对应的特征,比如说面积、周长、质心、边界框等等。
2.学习一些与轮廓提取有关的函数。、
提示:不同版本的python与opencv库可能在函数使用上有少许不同,在使用过程中如果发现不同之处,请到官网查询API:
目录
开始
在很多图像应用场景下需要检测出一个物体的边界轮廓,在opencv中,使用cv2.findContours()找到轮廓,使用cv2.drawContours()画出轮廓。
为了更好的检测效果,我们使用了二进制图像,也就是只有黑白像素(0和255)的图像输入,所以在进行边缘检测之前,最好先使用threshold阈值二值化算法或者是Canny边缘检测算法对图像进行大致的预处理,然后再输入findContours函数中找到轮廓。
例子:
import numpy as np
import cv2 as cv
im = cv.imread('test.jpg')
imgray = cv.cvtColor(im, cv.COLOR_BGR2GRAY)
ret, thresh = cv.threshold(imgray, 127, 255, 0)
#不同cv2版本的findContours函数返回值的数量不同,我的环境下返回三个值,官方文档返回两个值
_,contours, hierarchy = cv.findContours(thresh, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
使用drawContours函数画出轮廓:
- 把所有检测到的轮廓都画在图像上:
cv.drawContours(img, contours, -1, (0,255,0), 3)
- 把检测到的第四条轮廓画在图像上:
cv.drawContours(img, contours, 3, (0,255,0), 3)
- 大多数情况下,下面这种方式也可以使用:
cnt = contours[4]
cv.drawContours(img, [cnt], 0, (0,255,0), 3)
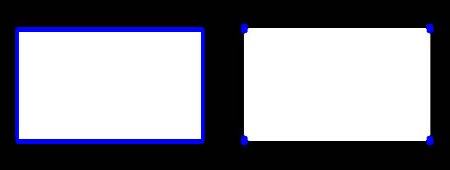
当轮廓中有大量直线线段时,可以使用cv.CHAIN_APPROX_SIMPLE(2)参数,而不使用cv.CHAIN_APPROX_NONE(1)参数。因为1会记录下轮廓边的每个像素,而2只会记录线段两端的点。比如说下面这个图,左边用的是参数1,右边用的是参数2:
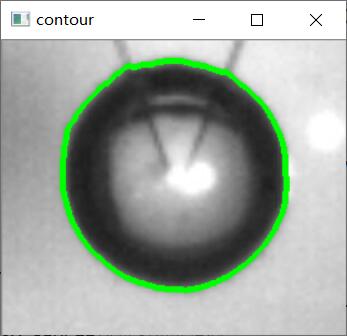
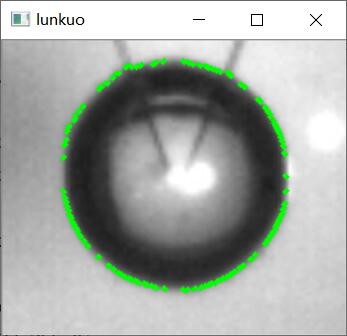
有意思的一点是cv2.drawContours这个函数的第二个参数,如果传入的使一个列表list,列表元素类型是numpy array,那么不管findContours的参数是(1)还是(2),都会将相邻两点之间连接起来,而不会画出离散的点。如果想通过(2)画出离散的点,需要将numpy array从list中拿出来,然后作为drawContours的第二个参数传入,这样画出的就是离散的点。例子:
import cv2
import numpy as np
img = cv2.imread('test9.jpg')
ret,thresh = cv2.threshold(cv2.cvtColor(img,cv2.COLOR_BGR2GRAY),127,255,0)
_,contours,hierarchy = cv2.findContours(thresh,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)#得到轮廓信息
#情况一,传入list,元素是numpy数组,函数将会画出相邻两点之间的连线
imgnew = cv2.drawContours(img, contours, 1, (0,255,0), 3)#第三个参数是1,代表了取出contours中index为1的array
cv2.imshow('contour',imgnew)
#情况二,传入numpy数组,函数将仅仅会画出这些点,而不会将他们依次连接
imgnew = cv2.drawContours(img, contours[1], -1, (0,255,0), 3)#第三个参数为-1,代表了画出contours[0]中所有的点
cv2.imshow('contour',imgnew)
情况一
情况二:
轮廓特征
Moments图像的矩
cv.moments()用来获取轮廓的矩,通过图像的矩可以计算某些特征,比如说物体的重心等等。例子:
import numpy as np
import cv2 as cv
img = cv.imread('test.jpg',0)
ret,thresh = cv.threshold(img,127,255,0)
contours,hierarchy = cv.findContours(thresh, 1, 2)
cnt = contours[0]
M = cv.moments(cnt)#计算图像矩
print( M )
图像重心
对于上面获取的M,可以提炼出一些有用的信息,比如说面积,重心等等。重心可以通过以下方程进行计算: 和 。
cx = int(M['m10']/M['m00'])#重心的x坐标
cy = int(M['m01']/M['m00'])#重心的y坐标
轮廓面积
轮廓面积通过cv.contourArea()获取或者直接从moments中的M[‘m00’]。
area = cv.contourArea(cnt)
轮廓周长(弧长)
可以使用cv.arcLength()获取轮廓的周长。第二个参数规定了这个轮廓是否是闭合的,True代表是闭合的,False代表轮廓仅仅是一个曲线。
perimeter = cv.arcLength(cnt,True)
轮廓近似估计(多边形逼近)
通过cv.approxPolyDP()函数可以找到一个和cnt近似的轮廓,基于Douglas-Peucker algorithm算法思想,用指定精度逼近多边形曲线。
根据我们指定的一个精度,可以将轮廓形状近似为顶点较少的其他形状。比如说你试图在一个图像找到一个长方形,但是由于图像中的某些问题,你没有得到一个完美的长方形,而是一个“坏形状”(如下图所示),现在你就可以通过这个功能获取一个近似的形状。在这种情况下,第二个参数称为epsilon,它是轮廓到近似轮廓的最大距离,是一个精度参数。第三个参数规定了这个轮廓是否是闭合的。
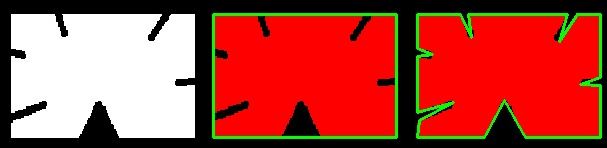
上面的图像中,第一张是通过阈值二值化处理后的图像,第二张是当
时画出的近似图像,第三张是当$epsilon=0.01*perimeter $时画出的近似图像。
凸包(Convex Hull)
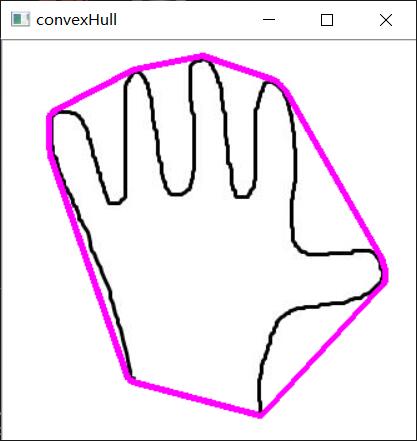
我们通常使用cv.convexHull(cnt)函数检测轮廓的凸缺陷,凸缺陷指的是轮廓向里凹陷的情况,比如说下面这种情况,紫色的线展示了图像中的凸包。
import cv2
import numpy as np
img = cv2.imread('hand.jpg')
#低于127时设置成255,255是白色,代表亮度(能量)最高,包括三通道的图像中(255,255,255)是白色
ret,thresh = cv2.threshold(cv2.cvtColor(img,cv2.COLOR_BGR2GRAY),127,255,0)
_,contours,hierarchy = cv2.findContours(thresh,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)#得到轮廓信息
cnt=contours[1]
hull=cv2.convexHull(cnt)
#函数的返回值是一组点(numpy array),我们需要依次将其通过线段连接起来,所以将其放入list
imgnew1 = cv2.drawContours(img, [hull], -1,(255,0,255), 3)
cv2.imshow('convexHull',imgnew1)
cv2.waitKey(0)
cv2.destroyAllWindows()
检查凸性
使用cv.isContourConvex()函数来检测这个函数是否是凸出的。只返回True或者False。
k = cv.isContourConvex(cnt)
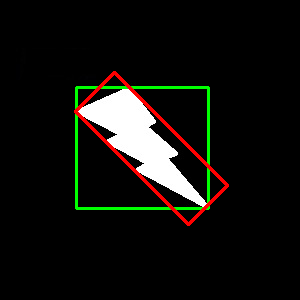
最小矩形边框
矩形边框(Bounding Rectangle)是说用一个最小的矩形,把找到的形状包起来。有两种情况的矩形边框可以选择,一种是绿色的,就是正常的矩形,另外一种带旋转的矩形,是红色边框,面积会更小一些:
首先介绍下cv2.boundingRect(img)这个函数
这个函数很简单,img是一个二值图,也就是输入图像;这个函数返回四个值,分别是x,y,w,h。其中,x,y是矩阵左上点的坐标,w,h是矩阵的宽和高,然后利用cv2.rectangle(img, (x,y), (x+w,y+h), (0,255,0), 2)画出矩形。
参数解释
第一个参数:img是输入图像
第二个参数:(x,y)是矩阵的左上点坐标
第三个参数:(x+w,y+h)是矩阵的右下点坐标
第四个参数:(0,255,0)是画线对应的rgb颜色
第五个参数:2是所画的线的宽度
代码如下:
import cv2
import numpy as np
img = cv2.imread('bounding rectangle.jpg')
ret,thresh = cv2.threshold(cv2.cvtColor(img,cv2.COLOR_BGR2GRAY),127,255,0)
_,contours,hierarchy = cv2.findContours(thresh,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)#得到轮廓信息
cnt=contours[1]
x,y,w,h=cv2.boundingRect(cnt)
#Straight Bounding Rectangle
cv2.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2)
#Rotate Rectangle
rect=cv2.minAreaRect(cnt)
box=cv2.boxPoints(rect)
box=np.int64(box)
imgnew=cv2.drawContours(img,[box],0,(0,0,255),2)
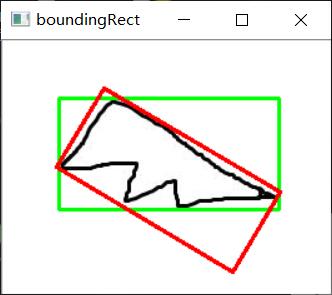
cv2.imshow('boundingRect',imgnew)
cv2.waitKey(0)
cv2.destroyAllWindows()
处理结果:
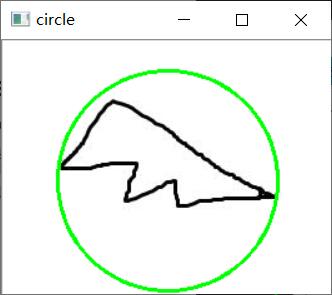
最小包围圆
使用cv.minEnclosingCircle()获得一个轮廓的最小包围圆。
(x,y),radius = cv.minEnclosingCircle(cnt)
center = (int(x),int(y))
radius = int(radius)
cv.circle(img,center,radius,(0,255,0),2)
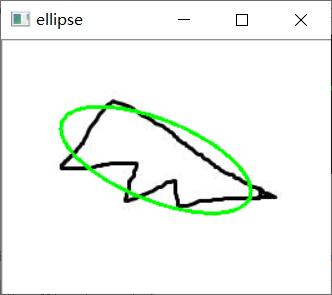
近似椭圆
使用cv.fitEllipse(cnt)函数将轮廓近似成一个椭圆,函数返回一个旋转之后的矩形,椭圆就在这个矩形里。
ellipse = cv.fitEllipse(cnt)
cv.ellipse(img,ellipse,(0,255,0),2)
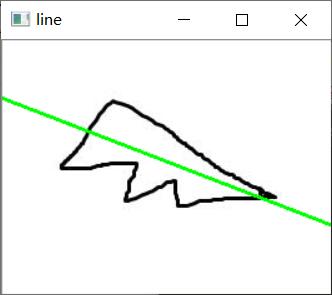
近似直线
可以通过cv.fitLine函数得到一组点的近似直线,如果这组点是轮廓的点,那么得出的就是轮廓的近似直线。
rows,cols = img.shape[:2]
[vx,vy,x,y] = cv.fitLine(cnt, cv.DIST_L2,0,0.01,0.01)
lefty = int((-x*vy/vx) + y)
righty = int(((cols-x)*vy/vx)+y)
cv.line(img,(cols-1,righty),(0,lefty),(0,255,0),2)
轮廓特性
在Opencv官网可以了解到更多轮廓特性,比如说Aspect Ratio、Extent等等。
链接在此