前两天AI君的一个朋友跑来找我,说他最近想买个扫地机器人,看到很多高端品牌的产品介绍里都会提到一个名词,SLAM。

(图片来自 戴森360eye 售价6440)

(图片来自 irobot960 售价4999)
而且他还发现,提到SLAM的扫地机器人都会比一般的贵,有些还能边扫边通过App生成地图。
所以到底SLAM是什么,又有哪些好处?今天就给大家简单科普一下。
SLAM的起源
SLAM的全名叫做Simultaneous Localization and Mapping,翻译过来就是同步定位与建图。用“一边…一边…”造句就是,一边计算自身位置,一边构建地图的过程。
具体是啥意思呢?
我们先来介绍下SLAM的“祖上”--潜艇定位。

潜艇大家都知道,是在海底活动的,通常潜艇的下潜深度在400~500m左右,这块区域被称为无光区(透光区也用不着潜艇了…)。
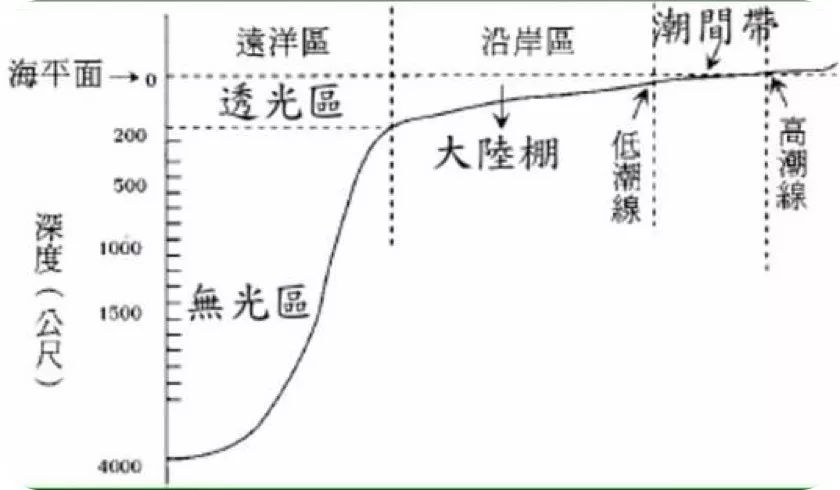
在这样的环境中活动差不多就跟你现在闭上眼睛在房间里走动一样,指不定就碰上什么了。
所以为了能安全执行军事任务,潜艇多数是用INS(惯性导航)和APS(水声导航)联合定位,加上航迹测绘和海图资料推算大致的舰艇位置,并且通过天文导航来纠正。
除此之外,潜艇还会进行严谨的海图测绘、洋流测绘、海底地形测绘等一系列的水文测绘,最终形成水文海图。
像这样定位加测绘制图的过程就是SLAM的雏形。代写qq953586085程序代写小店https://item.taobao.com/item.htm?spm=a230r.1.14.59.255028c3ALNkZ0&id=586797758241&ns=1&abbucket=15#detail
顺便提一句:
潜艇花钱可以买,但是水文资料没人会卖给你,所以周边国家即使拥有了先进的潜艇,但是没有自己详细的水文海图资料,也无法发挥潜艇的战斗力,甚至严重限制了潜艇的活动范围。这也是为什么我们要驱赶他国迫近的水文测量船的原因。
传感器,SLAM的眼
SLAM要实现定位和制图,第一步就是采集数据,而采集数据的关键就是传感器,可以说没有传感器就没有SLAM。而SLAM上的传感器种类多样,目前主流的我们可以将其分为两大类:激光雷达和摄像头。
以激光雷达为传感器的SLAM,我们简称为激光SLAM。
激光雷达能测量周围障碍点的角度和距离等信息,其特点是快、准、小,就是采集速度快、测量精准、计算量小。因为这些优点,激光雷达广泛应用于军事领域,比如激光制导导弹。

但是好东西都有一个特点,那就是贵。因此用了激光SLAM的商品通常都很贵,比如豪车。
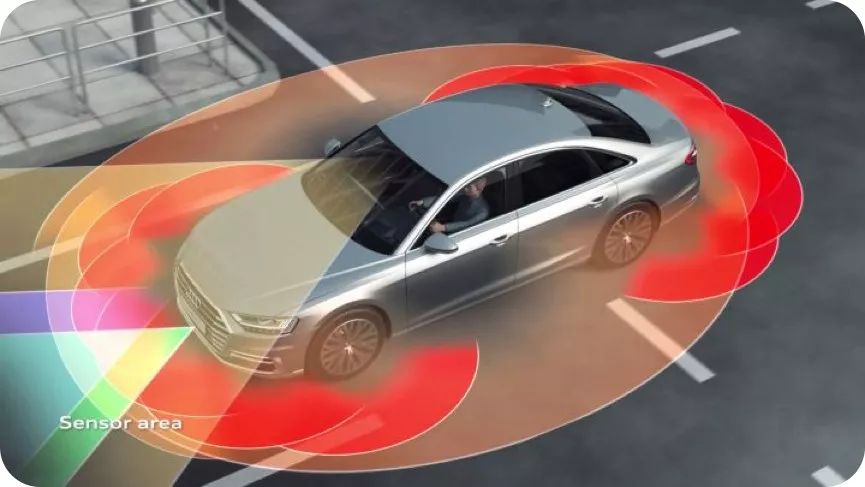
这是世界上最早宣布实现自动驾驶L3级别的量产车型--2018款奥迪A8,就是蜘蛛侠的“教练车”,售价120万。

这里需要注意几个点:
L3级别是自动驾驶技术分级,有L0~5 6个级别,L0就是人为驾驶,L5则是完全自动驾驶。特斯拉目前实现了L2级别。

目前有很多品牌汽车声称实现L3级别,但是都仍处于试验阶段,真正敢让消费者(并且是高端消费者)买了用的只有奥迪A8。
之所以奥迪敢将自家的L3级别自动驾驶技术拿来卖,一个原因就是它用的传感器多,而且还用上了别家没有的激光传感器。

(拥有自动驾驶功能汽车的传感器配置 知乎-陈光)
有了如此多的传感器,奥迪A8对周围环境就有了更广的感知范围,有了激光雷达就有了更精确的角度和距离的测量。这些就是奥迪的底气。
看到这儿有人要问了,既然都用了这么多传感器了,咋还没实现L4级别的完全自动驾驶呢?
其实如果在特定的路段,L4是可以实现的。但是,现实路况的复杂程度你也知道,连拥有“究极传感器”-眼睛的人类都不能保证没有刮擦,再加上万恶的加塞,只能说L4可能不是单纯靠技术就能实现的。

(传感器表示也很为难)
我们再说回传感器。
另一种传感器就是大家很熟悉的摄像头。以摄像头为传感器的SLAM叫VSLAM,即视觉SLAM。
视觉SLAM的一大优势就是价格便宜。
室内应用较广的中低端近距离平面激光雷达也是千元级的,差不多跟高端工业摄像头同价,而A8上高端室外多线激光雷达价格则更高。虽然激光雷达的价格随着量产可能会大幅下降,但是能否降到同档次摄像头的水平尚未可知。
当然,视觉SLAM也不是“便宜没好货”的存在,相反视觉SLAM的应用场景比激光雷达更丰富。
为什么呢?就是因为摄像头能拍摄画面。能拍摄画面的好处就在于视觉SLAM可以用在各种复杂且动态的场景。打个比方,如果未来要实现机器人管家,就得依靠视觉SLAM告诉他厨房和客厅的区别,到厨房可以做饭,而到了客厅就可以播放音乐。
视觉SLAM和激光SLAM其实各有千秋,各自的优缺点还有很多,在具体的应用环境中往往也是两者结合使用,这里就不往下细说了。
回到开头提到的扫地机器人,带SLAM和不带SLAM的产品价格差异大,说到底就是清扫效率不同。显然,通过SLAM测量建图的扫地机器人,能基于构建的地图规划路线,更高效的覆盖目标清扫区域。
AR,你身边的SLAM
如果你家没买自动驾驶汽车,也没买扫地机器人,那么还有一种方式能让你直观感受SLAM,那就是AR。
AR的学名叫增强现实。相信很多人看到这个词会马上想到一款游戏--Pokemon Go。

没错,Pokemon Go就是AR游戏。
氮素!
(划重点,要考)
pokemongo里并没有SLAM。
为什么呢?
因为pokemon go里的小精灵也好,精灵球也好,不会随着你的手机移动而变化。而真正用了SLAM的AR是这样的:
在这里,iPad摄像头就是视觉传感器,开启后开始定位并实时建图,根据小孩的位姿变化不断调整画作的大小和位置,让你感觉仿佛这幅名作就真实出现在你面前,用行话说就是,沉浸感很强。
提到沉浸感,就不得不说我们网易AR的技术了。
// 硬广时间 //
首先我们的SLAM测量建图精准,不会有“出戏”的沉浸感。
其次机型覆盖率高。视觉SLAM的运算负荷比较大,如果用千元机使用AR,由于硬件的原因往往会出现卡顿等渣效果。而我们网易AR,通过技术优化使AR更加稳定和低耗,轻松覆盖市面上95%的机型。(没理由歧视千元机嘛!)
另外就是渲染能力。