pytorch很好用,但是真实部署还是使用c++较多,因此需要用c++调用训练好的pytorch模型。参考官方示例https://github.com/apachecn/pytorch-doc-zh/blob/master/docs/1.0/cpp_export.md安装libtorch。但是官方示例中并没有使用真实的例子,且使用的是cpu版本的。
下面用一个真实的例子并用gpu,本示例的所有程序在https://github.com/zhangming8/pytorch-cpp-model
我使用的环境(没试过其他):ubuntu16.04, cuda9,采用源码安装的opencv3.4(https://blog.csdn.net/u010397980/article/details/89439515),libtorch(https://download.pytorch.org/libtorch/cu90/libtorch-shared-with-deps-latest.zip),python3,torch1.0.0。
1. 首先转化模型:
新建: vim create_model.py文件,内容如下,并执行下面的脚本:python3 create_model.py:
#coding:utf-8
import numpy as np
import os
import glob
import cv2
import shutil
import time
import torch
import torch.nn as nn
from mobilenetv2 import MobileNetV2
# 获取模型实例
model = MobileNetV2()
model.classifier = nn.Sequential(nn.Linear(1280, 8), nn.Sigmoid())
#model.load_state_dict(torch.load("latest.pt"))
img_size = 224
# 生成一个样本供网络前向传播 forward()
example = torch.rand(1, 3, img_size, img_size)
# 使用 torch.jit.trace 生成 torch.jit.ScriptModule 来跟踪
traced_script_module = torch.jit.trace(model, example)
img_list = ["test.jpg"]
s = time.time()
for i in img_list:
img_org = cv2.imread(i)
org_shape = img_org.shape[:-1]
org_shape = org_shape[::-1]
# process data
img = cv2.resize(img_org, (img_size, img_size))
img = img[:, :, ::-1].transpose(2, 0, 1) # 1. BGR to RGB; 2. change hxwx3 to 3xhxw
img = np.ascontiguousarray(img, dtype=np.float32) # uint8 to float32
img /= 255.0 # 0 - 255 to 0.0 - 1.0
inputs = torch.from_numpy(img)
inputs = inputs.unsqueeze(0)
output = traced_script_module(inputs)
print("output:", output)
traced_script_module.save("model_cpp.pt")
print("create c++ model done...")
mobilenetv2.py文件的内容如下:
import torch
import torch.nn as nn
import math
# A PyTorch implementation of MobileNet V2 architecture and pretrained model.
# from https://github.com/tonylins/pytorch-mobilenet-v2
# pretrained model can be downloaded from https://drive.google.com/file/d/1jlto6HRVD3ipNkAl1lNhDbkBp7HylaqR/view
# env: python3
def conv_bn(inp, oup, stride):
return nn.Sequential(
nn.Conv2d(inp, oup, 3, stride, 1, bias=False),
nn.BatchNorm2d(oup),
nn.ReLU6(inplace=True)
)
def conv_1x1_bn(inp, oup):
return nn.Sequential(
nn.Conv2d(inp, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
nn.ReLU6(inplace=True)
)
class InvertedResidual(nn.Module):
def __init__(self, inp, oup, stride, expand_ratio):
super(InvertedResidual, self).__init__()
self.stride = stride
assert stride in [1, 2]
hidden_dim = round(inp * expand_ratio)
self.use_res_connect = self.stride == 1 and inp == oup
if expand_ratio == 1:
self.conv = nn.Sequential(
# dw
nn.Conv2d(hidden_dim, hidden_dim, 3, stride, 1, groups=hidden_dim, bias=False),
nn.BatchNorm2d(hidden_dim),
nn.ReLU6(inplace=True),
# pw-linear
nn.Conv2d(hidden_dim, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
)
else:
self.conv = nn.Sequential(
# pw
nn.Conv2d(inp, hidden_dim, 1, 1, 0, bias=False),
nn.BatchNorm2d(hidden_dim),
nn.ReLU6(inplace=True),
# dw
nn.Conv2d(hidden_dim, hidden_dim, 3, stride, 1, groups=hidden_dim, bias=False),
nn.BatchNorm2d(hidden_dim),
nn.ReLU6(inplace=True),
# pw-linear
nn.Conv2d(hidden_dim, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
)
def forward(self, x):
if self.use_res_connect:
return x + self.conv(x)
else:
return self.conv(x)
class MobileNetV2(nn.Module):
def __init__(self, n_class=1000, input_size=224, width_mult=1.):
super(MobileNetV2, self).__init__()
block = InvertedResidual
input_channel = 32
last_channel = 1280
interverted_residual_setting = [
# t, c, n, s
[1, 16, 1, 1],
[6, 24, 2, 2],
[6, 32, 3, 2],
[6, 64, 4, 2],
[6, 96, 3, 1],
[6, 160, 3, 2],
[6, 320, 1, 1],
]
# building first layer
assert input_size % 32 == 0
input_channel = int(input_channel * width_mult)
self.last_channel = int(last_channel * width_mult) if width_mult > 1.0 else last_channel
self.features = [conv_bn(3, input_channel, 2)]
# building inverted residual blocks
for t, c, n, s in interverted_residual_setting:
output_channel = int(c * width_mult)
for i in range(n):
if i == 0:
self.features.append(block(input_channel, output_channel, s, expand_ratio=t))
else:
self.features.append(block(input_channel, output_channel, 1, expand_ratio=t))
input_channel = output_channel
# building last several layers
self.features.append(conv_1x1_bn(input_channel, self.last_channel))
# make it nn.Sequential
self.features = nn.Sequential(*self.features)
# building classifier
self.classifier = nn.Sequential(
nn.Dropout(0.2),
nn.Linear(self.last_channel, n_class),
)
self._initialize_weights()
def forward(self, x):
x = self.features(x)
#print("1 x.size()", x.size()) # bs,1280,7,7
x = x.mean(3).mean(2)
#print("2 x.size()", x.size()) # bs,1280
x = self.classifier(x)
#print("3 x.size()", x.size()) # bs,num_classes
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
if m.bias is not None:
m.bias.data.zero_()
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
elif isinstance(m, nn.Linear):
n = m.weight.size(1)
m.weight.data.normal_(0, 0.01)
m.bias.data.zero_()
if __name__ == "__main__":
img = torch.rand((2, 3, 224, 224))
net = MobileNetV2(n_class=1000)
print(net)
state_dict = torch.load('finetune_weight/mobilenet_v2.pth.tar') # add map_location='cpu' if no gpu
net.load_state_dict(state_dict)
print("***"*50)
pred = net(img)
print(pred.size())
'''
normalize = transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
input_size = 224
train_dataset = datasets.ImageFolder(
traindir,
transforms.Compose([
transforms.RandomResizedCrop(input_size, scale=(0.2, 1.0)),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
normalize,
]))
train_loader = torch.utils.data.DataLoader(
train_dataset, batch_size=batch_size, shuffle=True,
num_workers=n_worker, pin_memory=True)
val_loader = torch.utils.data.DataLoader(
datasets.ImageFolder(valdir, transforms.Compose([
transforms.Resize(int(input_size/0.875)),
transforms.CenterCrop(input_size),
transforms.ToTensor(),
normalize,
])),
batch_size=batch_size, shuffle=False,
num_workers=n_worker, pin_memory=True)
'''
从代码可以知道,该模型的输出为8个置信度为0-1的值(网络最后我用了一个sigmoid函数),当然你可以修改模型的结构产生其他输出。为了便于演示这个模型是随机初始化的,因此在实际中你需要加载已经训练好的模型再转,如使用model.load_state_dict(torch.load("latest.pt"))加载。
会生成一个mobilenetv2的model_cpp.pt文件,该文件是c++调用的模型。并输出8个结果,由于模型是采用的随机初始化,所以每个的值都不一样。这是python调用pytorch模型的结果。

2.新建一个predict-app.cpp文件
该文件主要用于调用pytorch模型。vim predict-app.cpp
注意修改model_path为模型model_cpp.pt的路径和测试图像的路径test_path,并在test_path中随便放几张.jpg的图像。
该cpp文件首先加载并初始化了model_path指定的模型,把模型放到gpu上,之后遍历test_path下面所有".jpg"图像,再对图像进行预处理,送进网络,并把最大概率对应的索引位置输出。可以参考注释
#include <torch/torch.h>
#include <ATen/ATen.h>
#include <torch/script.h>
#include <iostream>
#include <memory>
#include <string>
#include <chrono>
#include "opencv2/core.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/opencv.hpp"
using namespace cv;
using namespace std;
using namespace chrono;
#include <experimental/filesystem>
namespace fs = std::experimental::filesystem;
int main(int argc, const char* argv[]) {
string model_path;
if (argc == 2){
model_path = argv[1];
}
else {
model_path = "/home/xxxxxxxxx/model_cpp.pt";
}
cout << "using model:" << model_path << endl;
string test_path = "/home/xxxxxxxxx/data/";
// init model
int img_size = 224; // resize img to 224
vector<torch::jit::IValue> inputs; //def an input
shared_ptr<torch::jit::script::Module> module = torch::jit::load(model_path); //load model
module->to(at::kCUDA); // put model to gpu
assert(module != nullptr);
cout << "[INFO] init model done...\n";
int i = 0;
double t_start, t_end, t_cost;
t_start = getTickCount(); // get now time
Mat src, image, float_image;
for (const auto &p : fs::directory_iterator(test_path)){ //遍历文件夹中的所有文件
string s = p.path(); //get one file path
string suffix = s.substr(s.find_last_of(".")+1); //获取文件的格式(后缀)
if (suffix != "jpg"){
continue;
}
cout << i << "-------------------------" << endl;
cout << p.path() << '\n';
src = imread(s); //读图
// 图像预处理 注意需要和python训练时的预处理一致
resize(src, image, Size(img_size, img_size)); // resize 图像
cvtColor(image, image, CV_BGR2RGB); // bgr -> rgb
image.convertTo(float_image, CV_32F, 1.0 / 255); //归一化到[0,1]区间
//cout << float_image.at<Vec3f>(100,100)[1] << endl; //输出一个像素点点值
auto img_tensor = torch::CPU(torch::kFloat32).tensorFromBlob(float_image.data, {1, img_size, img_size, 3}); //将cv::Mat转成tensor,大小为1,224,224,3
img_tensor = img_tensor.permute({0, 3, 1, 2}); //调换顺序变为torch输入的格式 1,3,224,224
//img_tensor[0][0] = img_tensor[0][0].sub_(0.485).div_(0.229); //减去均值,除以标准差
//img_tensor[0][1] = img_tensor[0][1].sub_(0.456).div_(0.224);
//img_tensor[0][2] = img_tensor[0][2].sub_(0.406).div_(0.225);
auto img_var = torch::autograd::make_variable(img_tensor, false); //不需要梯度
inputs.emplace_back(img_var.to(at::kCUDA)); // 把预处理后的图像放入gpu
torch::Tensor result = module->forward(inputs).toTensor(); //前向传播获取结果
inputs.pop_back();
cout << "result:" << result << endl;
auto pred = result.argmax(1);
cout << "max index:" << pred << endl;
/*std::tuple<torch::Tensor,torch::Tensor> res_sort = result.sort(-1, true);
torch::Tensor top_scores = get<0>(res_sort)[0];
torch::Tensor top_idxs = get<1>(res_sort)[0].toType(torch::kInt32);
auto top_scores_a = top_scores.accessor<float,1>();
auto top_idxs_a = top_idxs.accessor<int,1>();
for (int j = 0; j < 3; ++j) {
int idx = top_idxs_a[j];
cout << "top-" << j+1 << " index: " << idx << ", score: " << top_scores_a[j] << endl;
}*/
i++;
if (i > 1000){
break;
}
}
t_end = getTickCount();
t_cost = t_end - t_start;
//t_cost = t_cost / getTickFrequency();
printf("time cost: %4.f ms\n", t_cost/1000000.0);
return 0;
}
/*
void Mycircle(){
Point p = Point(320, 190); //圆的中心点
int r= 50; //圆的半径
Scalar color = Scalar(0, 255, 0);
circle(src, p, r, color);
}
*/
3. 编译
默认opencv和libtorch都已经安装好了。
首先新建一个CMakeLists.txt文件,内容如下:vim CMakeLists.txt
cmake_minimum_required(VERSION 3.0 FATAL_ERROR)
project(custom_ops)
find_package(Torch REQUIRED)
find_package( OpenCV REQUIRED )
include_directories( ${OpenCV_INCLUDE_DIRS} )
add_executable(predict-app predict-app.cpp)
target_link_libraries(predict-app "${TORCH_LIBRARIES}" ${OpenCV_LIBS} stdc++fs)
set_property(TARGET predict-app PROPERTY CXX_STANDARD 11)
再依次执行:
mkdir build
cd build
cmake -DCMAKE_PREFIX_PATH=/media/DATA2/libtorch ..
(其中/media/DATA2/libtorch为你的libtorch的路径)
make
如果不出意外的话会出现以下界面:
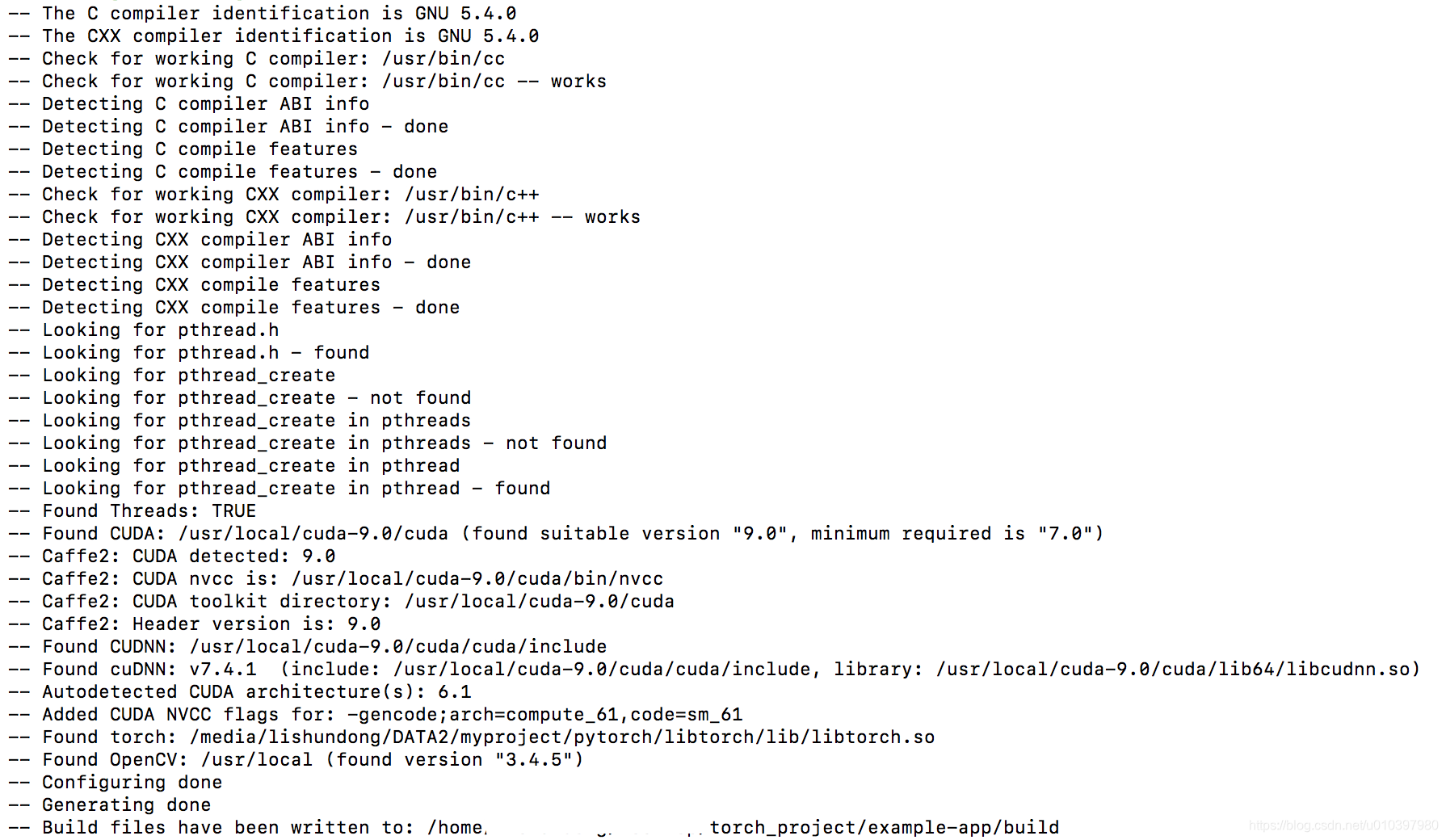
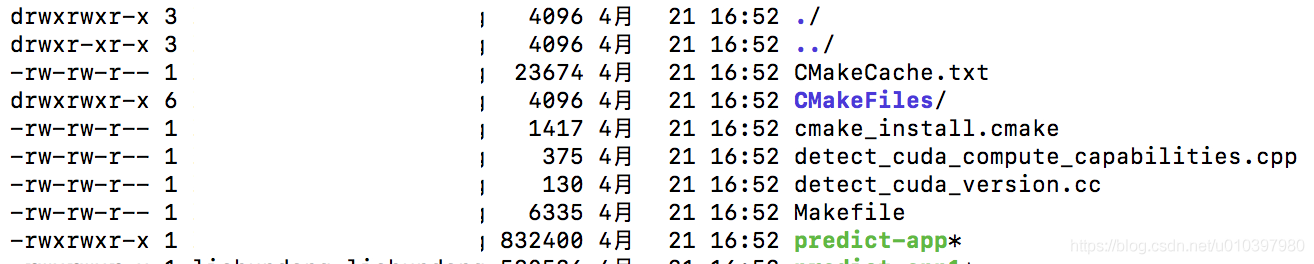
以及

发现在build文件夹下生成了predict-app可执行文件,及其他文件:
最后执行./predict-app即可运行程序,界面如下所示:

发现使用c++的模型和使用python的模型结果输出是一样的(只要预处理没问题)。