目标检测简单总结
文章目录
大致分类
按照stage可以分为
- one-stage
- SSD
- YOLO
- etc
- two-stage
- Faster RCNN
- R-FCN
- etc
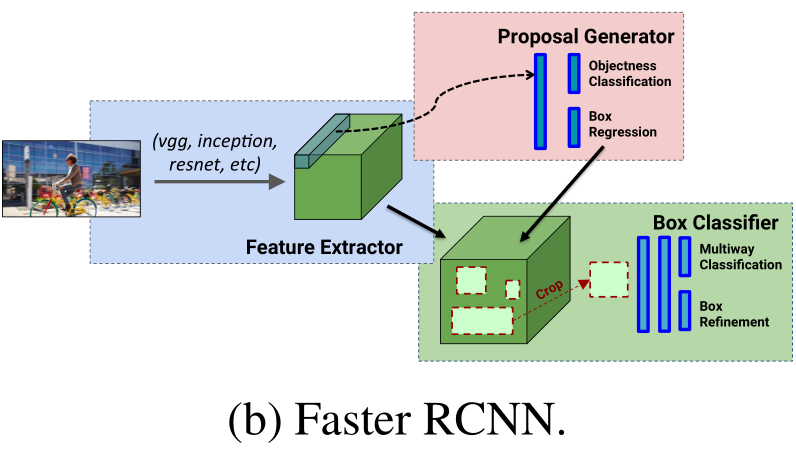
谷歌在Speed/accuracy trade-offs for modern convolutional object detectors中将目标检测模型分为了三种元结构Faster R-CNN,R-FCN和SSD
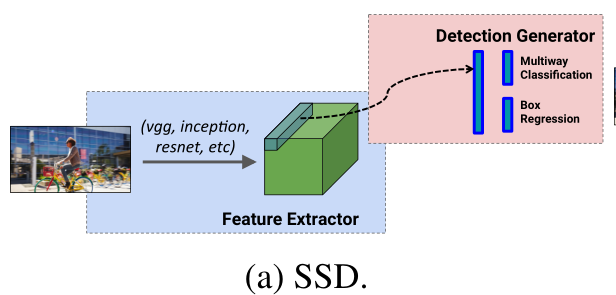

one-stage
SSD
网上文章漫天飞
RefineNet
RefineNet大致上是SSD算法和RPN网络、FPN算法的结合
RefineNet: Multi-Path Refinement Networks or High-Resolution Semantic Segmentation
YOLO
网上文章漫天飞
two-stage
其实SPPNet也可以看一看的。
Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition
网上关于rcnn系列的文章也挺多的。如果时间紧的化,rcnn系列可以直接看Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
下面说些其他有趣的论文和模型。
FCN
FCN(Fully Convolutional Networks)是用于语义分割的模型,文中提出的用于上采样的转置卷积(反卷积)应用挺广泛的。
Fully Convolutional Networks for Semantic Segmentation
FPN
FPN(Feature Pyramid Network)利用上采样构建新型的特征金字塔。
Feature Pyramid Networks for Object Detection
DCN
DCN(Deformable Convolutional Networks)的卷积域可以变形,不再是传统的方正形状
Deformable Convolutional Networks
Mask-RCNN
用于实例分割(目标检测+语义分割)。在faster rcnn的基础上添加了一支路预测mask,改进了pool成RoIAlign
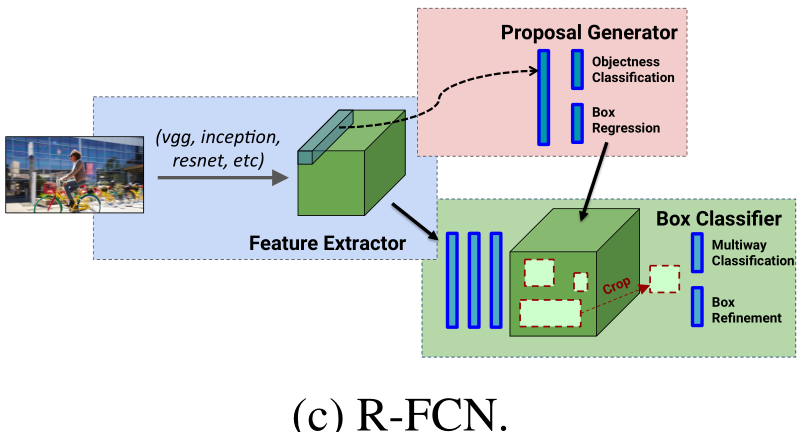
R-FCN
R-FCN(Region-based Fully Convolutional Networks)结合位置敏感得分图,将rcnn系列中用于最后预测的子网络头部共享了
R-FCN: Object Detection via Region-based Fully Convolutional Networks
Light-head R-CNN
Light-head R-CNN将R-FCN进一步改进,将子网络头部压缩到很薄。
Light-Head R-CNN: In Defense of Two-Stage Object Detector
R-FCN-3000
将细粒度分类(fine-grained classification)与R-FCN相结合。
R-FCN-3000 at 30fps: Decoupling Detection and Classification
参考资料
基于深度学习的【目标检测】算法综述说的比较生动活泼些
目标检测 (Detection) 算法综述将各个模型点评
干货 | 基于深度学习的目标检测算法综述(一)是美图技术关于Two/One stage 算法改进的文章
干货 | 基于深度学习的目标检测算法综述(二)是美图技术关于解决方案的文章
干货 | 基于深度学习的目标检测算法综述(三)是美图技术关于扩展应用、综述的文章