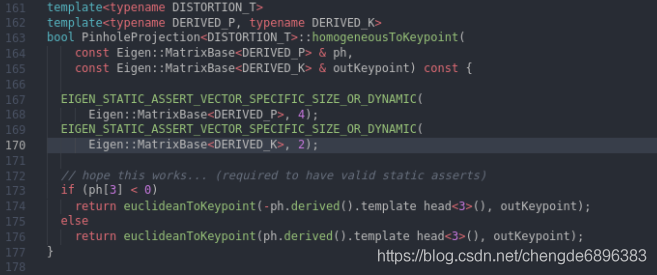
homogeneousToKeypoint: 表示二维平面点到二维平面点的投影;
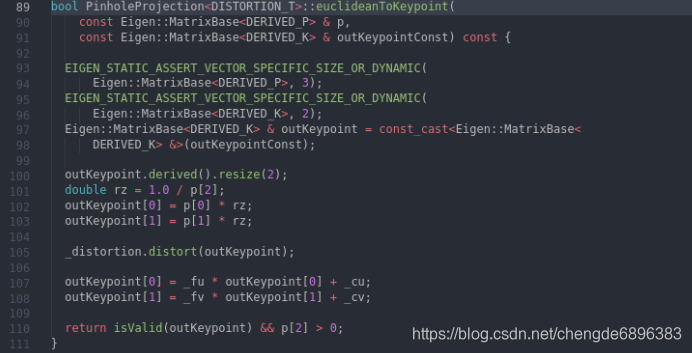
euclideanToKeypoint: 表示三维空间点到二维平面点的投影.
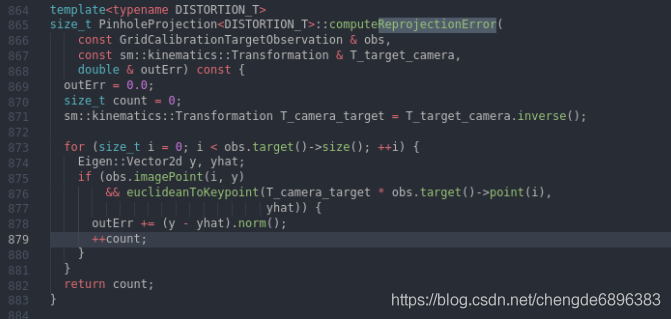
kalibr/aslam_cv/aslam_cameras/include/aslam/cameras/implementation/PinholeProjection.hpp
fov畸变模型:
kalibr/aslam_cv/aslam_cameras/include/aslam/cameras/implementation/FovDistortion.hpp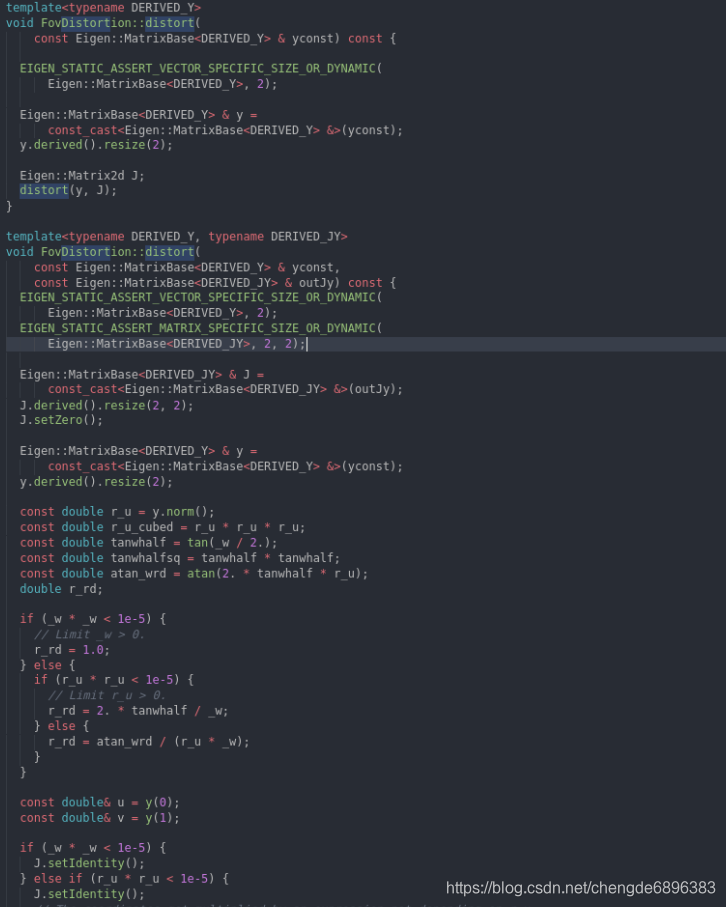


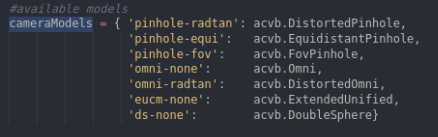

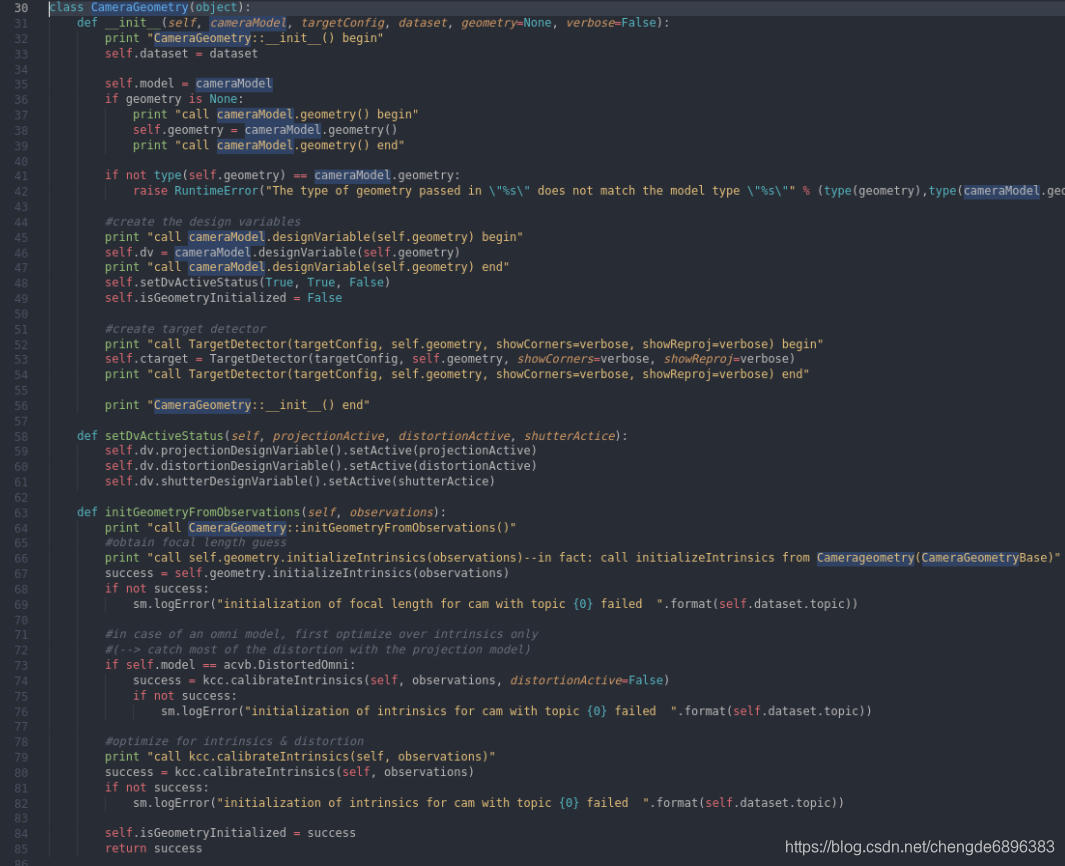
kalibr/aslam_cv/aslam_cv_backend_python/python/aslam_cv_backend/__init__.py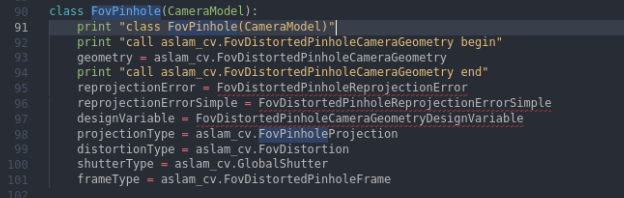
kalibr/aslam_cv/aslam_cameras/include/aslam/cameras.hpp
![]()
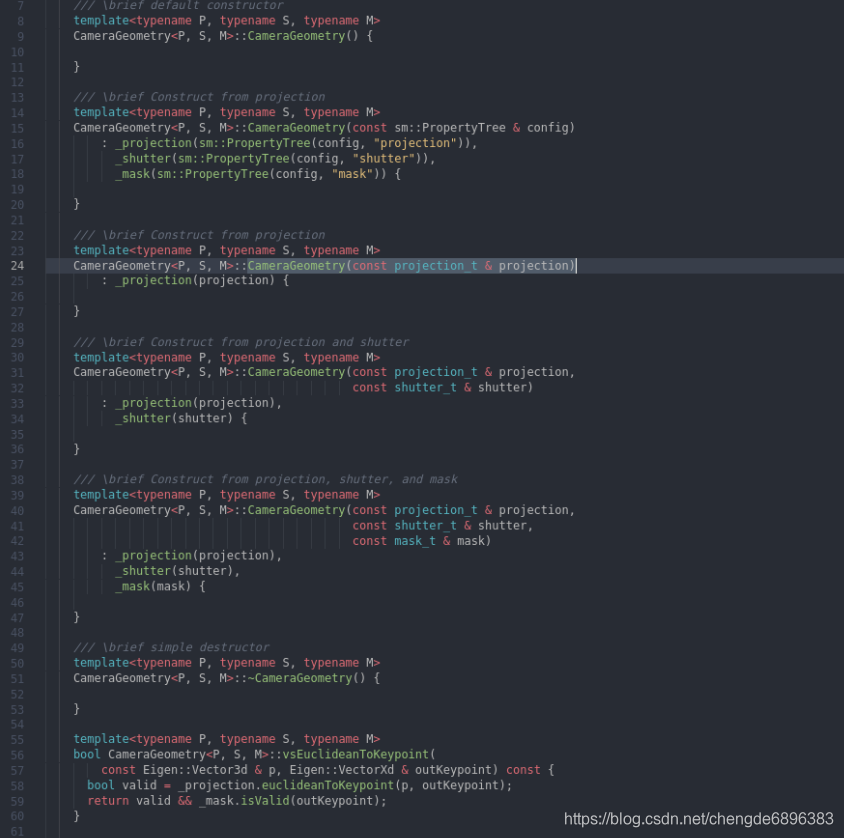
kalibr/aslam_cv/aslam_cameras/include/aslam/cameras/CameraGeometry.hpp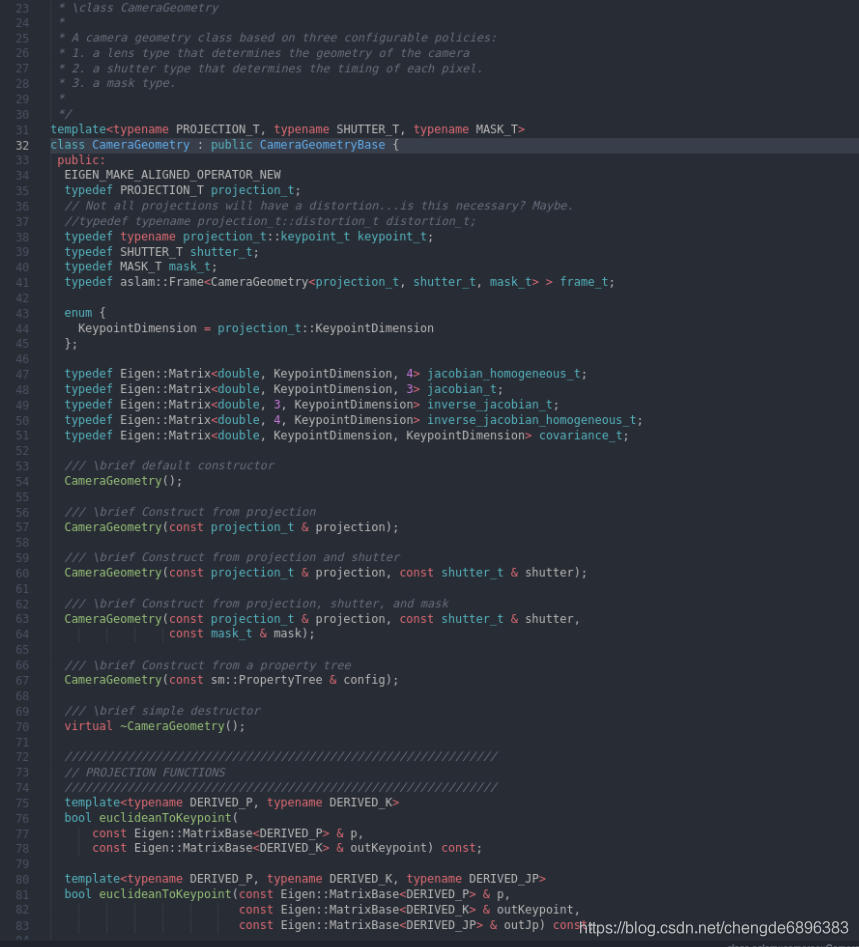
kalibr/aslam_cv/aslam_cameras/include/aslam/cameras/implementation/CameraGeometry.hpp