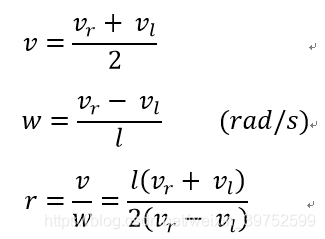
机器人底层程序的时候,经常用到航迹推演(Odometry),无论是定位导航还是普通的方向控制。航迹推演中除了对机器人位姿进行估计,另一个很重要的关系是移动机器人前进速度、转向角速度
与左轮速度
、右轮速度
之间的转换。
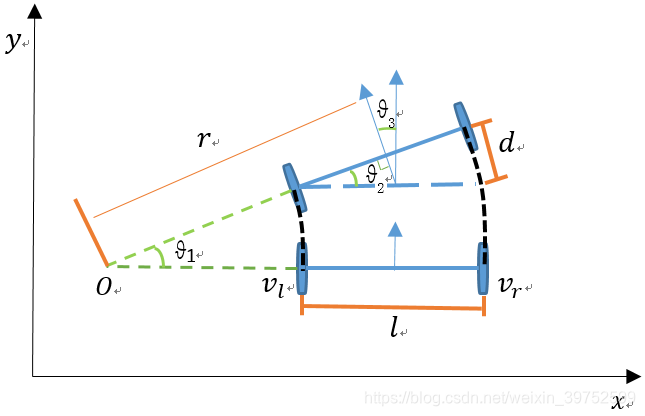
下图是移动机器人在两个相邻时刻的位姿,其中是两相邻时刻移动机器人绕圆弧运动的角度,
是两相邻时刻移动机器航向角(朝向角head)的变化量。
是左右轮之间的间距,
是右轮比左轮多走的距离。
是移动机器人圆弧运动的半径。
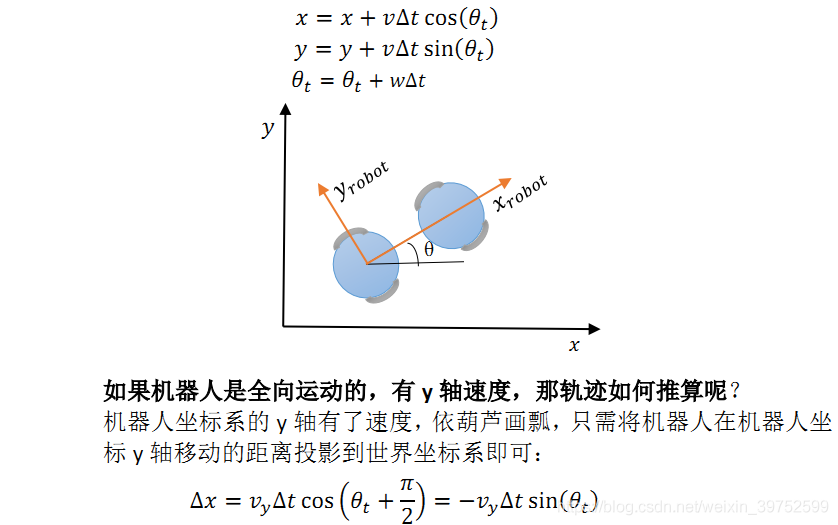
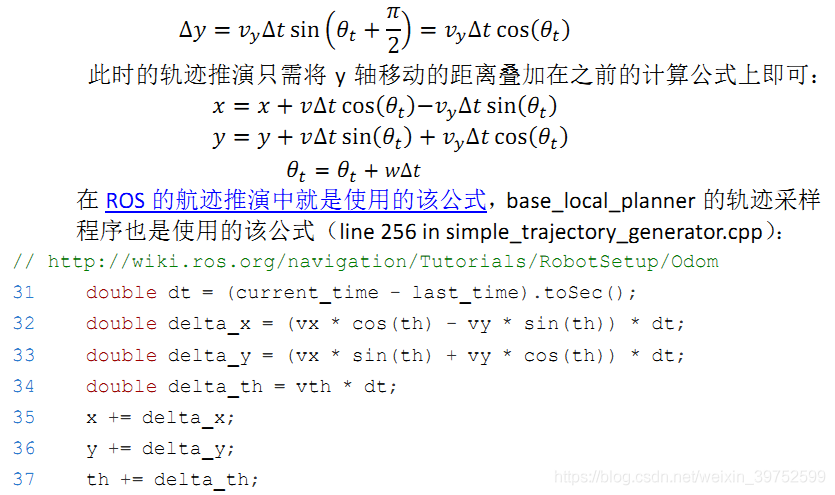
运动模型分为两轮差速和3轮全向 (假设dt运行为直线)
参考:
1.https://blog.csdn.net/heyijia0327/article/details/47021861
2.https://blog.csdn.net/heyijia0327/article/details/44983551