版权声明:王家林大咖2018年新书《SPARK大数据商业实战三部曲》清华大学出版,清华大学出版社官方旗舰店(天猫)https://qhdx.tmall.com/?spm=a220o.1000855.1997427721.d4918089.4b2a2e5dT6bUsM https://blog.csdn.net/duan_zhihua/article/details/83691089
cs231 Convolutional Networks Group Normalization:
def spatial_groupnorm_forward(x, gamma, beta, G, gn_param):
"""
Computes the forward pass for spatial group normalization.
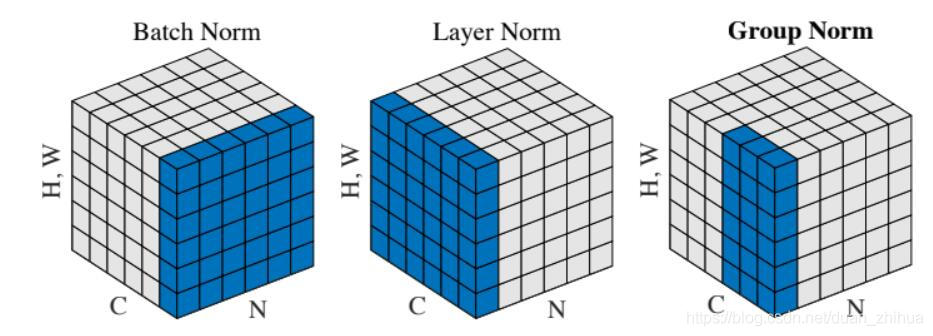
In contrast to layer normalization, group normalization splits each entry
in the data into G contiguous pieces, which it then normalizes independently.
Per feature shifting and scaling are then applied to the data, in a manner identical to that of batch normalization and layer normalization.
Inputs:
- x: Input data of shape (N, C, H, W)
- gamma: Scale parameter, of shape (C,)
- beta: Shift parameter, of shape (C,)
- G: Integer mumber of groups to split into, should be a divisor of C
- gn_param: Dictionary with the following keys:
- eps: Constant for numeric stability
Returns a tuple of:
- out: Output data, of shape (N, C, H, W)
- cache: Values needed for the backward pass
"""
out, cache = None, None
eps = gn_param.get('eps',1e-5)
###########################################################################
# TODO: Implement the forward pass for spatial group normalization. #
# This will be extremely similar to the layer norm implementation. #
# In particular, think about how you could transform the matrix so that #
# the bulk of the code is similar to both train-time batch normalization #
# and layer normalization! #
###########################################################################
#pass
N, C, H, W = x.shape
# 按分组g将大的立方体积木拆成 C/G个小积木体。
#N, C, H, W = 2, 6, 4, 5;G = 2 ;这里g为2个一组,拆成6/2=3组小立方体。
x = x.reshape((N * G, C // G * H * W)) #(N, C, H, W)--->(N * G, C // G * H * W)
#接下来就可以将每1个小立方体作为一个Layer Norm的模块去处理。
x = x.T #(C // G * H * W,N * G)
mean_x = np.mean(x,axis =0)
var_x= np.var(x,axis = 0)
inv_var_x = 1 / np.sqrt(var_x + eps)
x_hat = (x - mean_x)/np.sqrt(var_x + eps) ##(C // G * H * W,N * G)
x_hat = x_hat.T #(C // G * H * W,N * G)---->(N * G, C // G * H * W)
x_hat = x_hat.reshape((N, C, H, W)) #(N * G, C // G * H * W)---->(N, C, H, W)
out = gamma * x_hat + beta
cache =( x_hat,gamma,mean_x,inv_var_x, G)
###########################################################################
# END OF YOUR CODE #
###########################################################################
return out, cache
def spatial_groupnorm_backward(dout, cache):
"""
Computes the backward pass for spatial group normalization.
Inputs:
- dout: Upstream derivatives, of shape (N, C, H, W)
- cache: Values from the forward pass
Returns a tuple of:
- dx: Gradient with respect to inputs, of shape (N, C, H, W)
- dgamma: Gradient with respect to scale parameter, of shape (C,)
- dbeta: Gradient with respect to shift parameter, of shape (C,)
"""
dx, dgamma, dbeta = None, None, None
###########################################################################
# TODO: Implement the backward pass for spatial group normalization. #
# This will be extremely similar to the layer norm implementation. #
###########################################################################
pass
x_hat,gamma,mean_x,inv_var_x, G = cache
#x_hat :(N, C, H, W)
N, C, H, W = x_hat.shape
# 在(N, H, W)维度上计算
dgamma = np.sum(dout * x_hat, axis=(0, 2, 3), keepdims=True)
dbeta = np.sum(dout, axis=(0, 2, 3), keepdims=True)
#forward时拆分成几个小立方体积来计算的,backward反向传播时仍需分组拆成几个小立方体计算。
#dout :(N, C, H, W)--->(N * G, C // G * H * W) ---->(C // G * H * W, N * G)
dxhat = (dout * gamma).reshape((N * G, C // G * H * W)).T
#x_hat:(N, C, H, W)--->(N * G, C // G * H * W) ---->(C // G * H * W, N * G)
x_hat = x_hat.reshape((N * G, C // G * H * W)).T
# d: C // G * H * W 将每1个小立方体作为一个Layer Norm的反向backward模块去处理
d = x_hat.shape[0]
dx = (1. / d) * inv_var_x * (d * dxhat - np.sum(dxhat, axis=0) -
x_hat * np.sum(dxhat * x_hat, axis=0))
dx = dx.T #(C // G * H * W, N * G) ----->(N * G, C // G * H * W)
# 将几个小立方体再重新拼接成一个大立方体
dx = dx.reshape((N, C, H, W)) #(N * G, C // G * H * W) --->(N, C, H, W)
###########################################################################
# END OF YOUR CODE #
###########################################################################
return dx, dgamma, dbeta