TIM1,TIM8可以产生死区互补PWM波,
学习后发现stm32的定时器功能确实很强大,小总结一下方便以后使用的时候做参考。Stm32定时器一共分为三种:tim1和tim8是高级定时器,6和7是基本定时器,2—5是通用定时器。从名字就可以看得出来主要功能上的差异。今天我主要是用定时器做pwm输出,所以总结也主要是针对pwm方面的。
先大致说下通用和高级定时器的区别。通用的可以输出四路pwm信号互不影响。高级定时器可以输出三对互补pwm信号外加ch4通道,也就是一共七路。
所以这样算下来stm32一共可以生成4*5+7*2=30路pwm信号。接下来还有功能上的区别:通用定时器的pwm信号比较简单,就是普通的调节占空比调节频率(别的不常用到的没去深究);高级定时器的还带有互补输出功能,同时互补信号可以插入死区,也可以使能刹车功能,从这些看来高级定时器的pwm天生就是用来控制电机的。
1、TIM生成PWM初始化设置
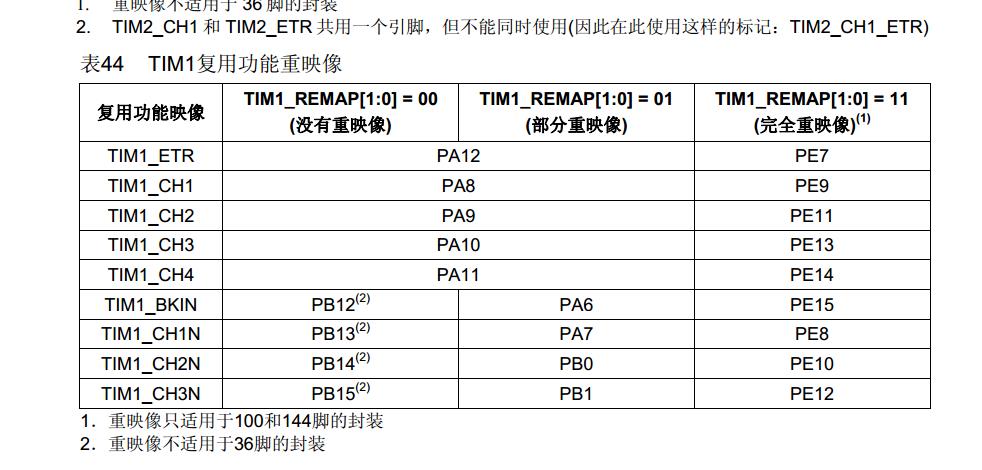
首先确定引脚,TIM1可以 无映射、部分映射、完全映射,对应引脚不同,这里使用部分重映射,使用TIM1的通道GH1、CH2产生PWM波,CH1N、CH2N产生互补的PWM波,即PA8和PA7为一对,PA9和PB0为一对。
//1、初始化结构体
//使用到GPIO、TIM基本配置、比较输出、死区配置;
GPIO_InitTypeDef GPIO_InitStructure2;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_BDTRInitTypeDef TIM_BDTRInitStructure;
//2、使能时钟,GPIO,TIM1,复用功能,
//时钟使能,管脚Rmap
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|
RCC_APB2Periph_GPIOB | RCC_APB2Periph_TIM1 | RCC_APB2Periph_AFIO,ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM1, ENABLE);
TIM_DeInit(TIM1);
TIM_InternalClockConfig(TIM1);
// 3、配置引脚,PE8和PE9
GPIO_InitStructure2.GPIO_Pin=GPIO_Pin_8|GPIO_Pin_9|GPIO_Pin_7;
GPIO_InitStructure2.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure2.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure2);
GPIO_InitStructure2.GPIO_Pin=GPIO_Pin_0;
GPIO_InitStructure2.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure2.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOB,&GPIO_InitStructure2);
//4、 TIM基础设置;
//设置计数频率为72M/36;即每秒中计数值计数2M;
//Period设置为99,即计数够100清零,对应PWM频率为2M/100=20Khz;
TIM_TimeBaseStructure.TIM_Period=100-1; //周期为计数100次,计数频率为72M/36;
TIM_TimeBaseStructure.TIM_Prescaler=36-1; //设置频率为72M/36;
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; //不分频,时钟72M
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
//5、设置输出比较
//Pulse为跳变计数值,当计数值到达20时,PWM由高电平跳变到低电平,设置Pulse/Period即设置了占空比;在主程序中可以调用TIM_SetCompare1(TIM1,psc);动态设置Pulse的值;
//定时器比较输出配置
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_Pulse=20; //占空比
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High; //
TIM_OCInitStructure.TIM_OCIdleState=TIM_OCIdleState_Reset;
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
//高级定时器才有的互补输出配置
TIM_OCInitStructure.TIM_OCNPolarity=TIM_OCNPolarity_High; //互补端输出极性
TIM_OCInitStructure.TIM_OutputNState=TIM_OutputNState_Enable;
TIM_OCInitStructure.TIM_OCIdleState=TIM_OCIdleState_Reset; //死区后输出状态
TIM_OCInitStructure.TIM_OCNIdleState=TIM_OCNIdleState_Reset;
TIM_OC1Init(TIM1,&TIM_OCInitStructure);
TIM_OC2Init(TIM1,&TIM_OCInitStructure);
/*6、设置死区
本项目要驱动IR2101晶闸管,死区时间设置为500ns,此处TIM_DeadTime =36;
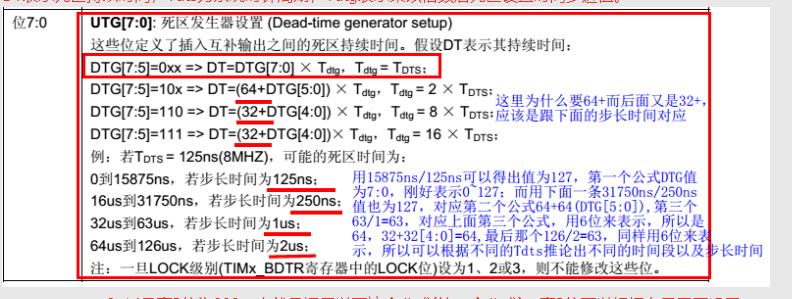
死区时间设置要设置UTG[7:0]位;
图中T_DTS为系统时钟周期:T_DTS=1/(时钟频率)=1/72M=13.89ns;[7:5]=0XX;
当TIM_DeadTime 写入范围为[0,127]时,死区时间=[7:0] X T_DTS=[0,1764ns]
当TIM_DeadTime 写入范围为[128,191]时,[7:5]=10X;
死区时间=(64+[5:0]) x 2 x 13.89=(64+0)~(64+63)x2x13.89=[1777.9,3528.88]
当TIM_DeadTime 写入范围为[192,223]时,[7:5]=110;
死区时间=(32+[4:0]) X 8 X 13.89=(32+0)~(32+31) X 8X13.89=[3555.84,7000.56 ]
TIM_DeadTime 写入范围为[224,255]时,[7:5]=111;
死区时间=(32+[4:0])X 16 X13.89=(32+0)~(32+31) X 16X 13.89=[7111.68,140001.12]*/
//高级定时器死区配置
TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Disable;
TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Disable;
TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_OFF;
TIM_BDTRInitStructure.TIM_DeadTime = 36; //死区时间
TIM_BDTRInitStructure.TIM_Break = TIM_Break_Disable; //刹车功能使能
TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High; //刹车输入极性
TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable;
TIM_BDTRConfig(TIM1, &TIM_BDTRInitStructure);
7、 开启CCR和ARR,使能TIM1,
//ccr1自动重装载
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM1, ENABLE);
TIM_Cmd(TIM1,ENABLE);
//高级定时器才有的主输出使能,不开启不能用;
TIM_CtrlPWMOutputs(TIM1, ENABLE);