便携式ROV搭建系列(一):方案制定
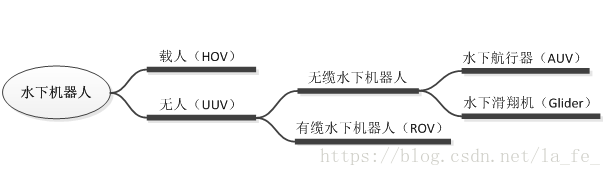
1 水下机器人分类
2 开源系统方案
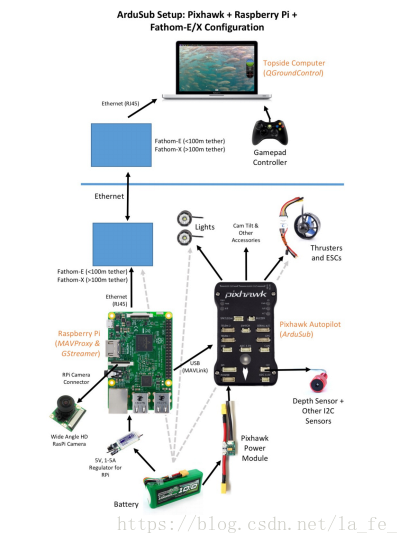
方案一:基于pixhawk和树莓派的控制系统
零编程,组装即可用;罗技手柄控制;支持多种推进器布局;上位机只能运行在Windows系统中的win10,其他不支持。具体配置过程可参考创客智造之ArduSub入门教程
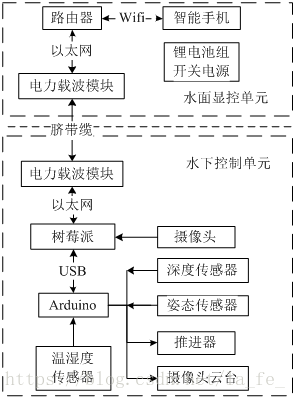
方案二:基于arduino和树莓派的控制系统
博主采用的方案如下图
3 实现过程
- 确定方案并选型,搭建控制系统
涉及问题:接口数量(IIC、串口)、电源匹配、通信协议 - 下位机源码编制
涉及问题:两处通信(APP与树莓派,树莓派与Arduino)、串口命令的读取与解析、视频实时传输、直流电机PWM调速与舵机云台控制、闭环控制(定航、定深)等 - 上位机控制APP开发
涉及问题:控件监听(按钮、滑动条等)、socket通信、视频显示等
4 结果展示
便携式ROV三维渲染图

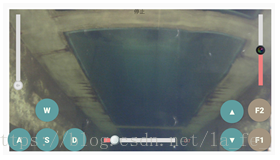
手机控制APP主界面: