YOLOv7介绍
YOLOv7论文在上个月6号挂在了Arxiv上之后,引起了巨大轰动,短短一个月的时间,Github上就有了4.3k个Star。

从论文题目可以看出来,YOLOv7又是一个集大成者的杰作;从Github源码可以看出, 整体结构与YOLOv5极其相似,因此有YOLOov5基础的小伙伴可以无脑上手v7。
另外来看下v7的两位大牛作者,一作是 Chien-Yao Wang,近几年一直耕耘在目标检测领域,尤其是YOLO系列,代表作:YOLOv7、YOLOR、ScaledYOLOv4、CSPNet等。二作是 Alexey Bochkovskiy,就是在20年Joseph Redmon宣布退出CV领域后扛起YOLO系列大旗并发布YOLOv4的那位大神。
整体网络架构
YOLOv7完整网络架构以及各组件的详细解析可以移步至:【YOLOv7_0.1】网络结构与源码解析,这里从另一个角度来了解YOLOov7的网络架构:
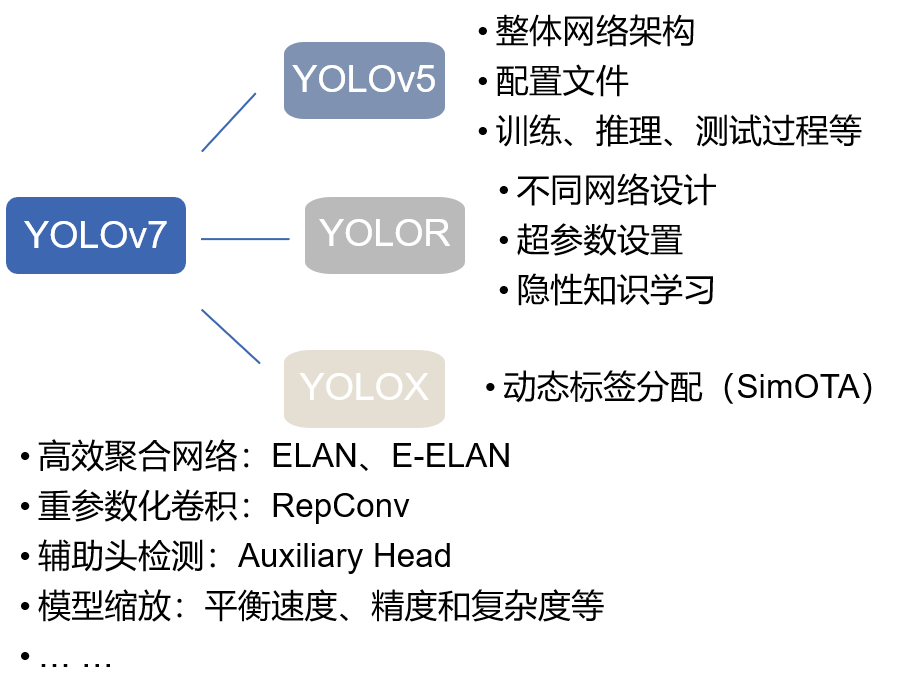
上面这张图是根据我目前的理解,对YOLOv7的整体结构进行的拆分,可能会有不正确的地方,欢迎各位小伙伴前来交流~
可以很清楚的看到,YOLOv7大部分继承自YOLOv5,包括整体网络架构、配置文件的设置和训练、推理、验证过程等等,基本上熟悉v5就可以无脑上手v7了;此外,v7也有不少继承自YOLOR,毕竟是同一个作者前后年的工作,包括不同网络的设计、超参数设置以及隐性知识学习的加入;还有就是在正样本匹配时仿照了YOLOX的SimOTA策略。
除了这些在已有YOLO版本中的算法之外,YOLOv7还包括了近几年最新的trick:高效聚合网络(目前论文还未接收)、重参数化卷积、辅助头检测、模型缩放等等,因此学习YOLOv7还是非常有价值的。
高效聚合网络
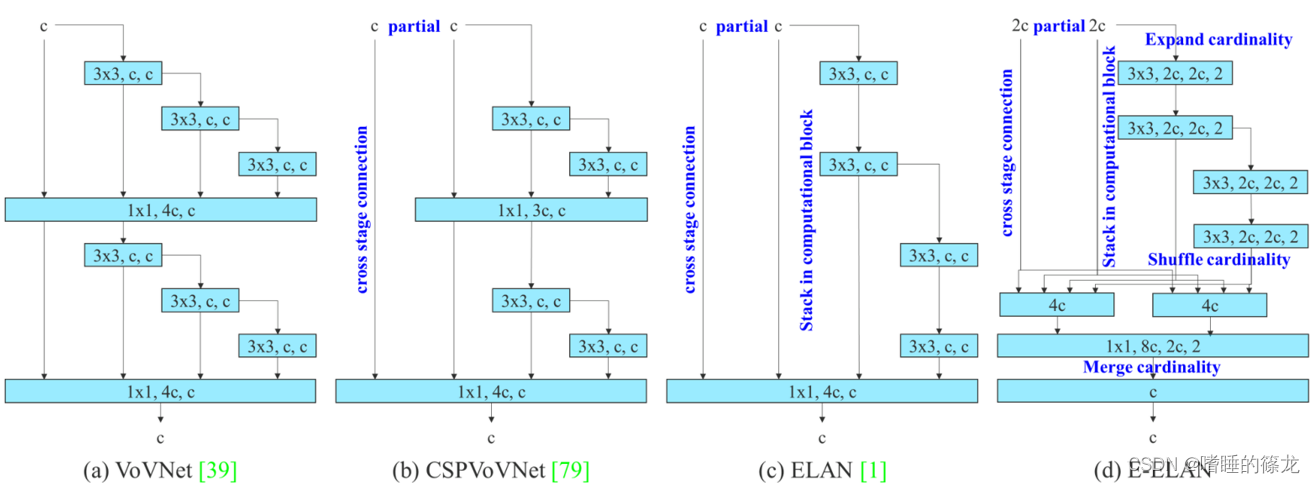
图a和图b是之前常用的特征提取网络,图c则是YOLOv7主要用到的ELAN网络,虽然有引文,但是并没有任何详细资料来学习,对此,作者是这么说的:
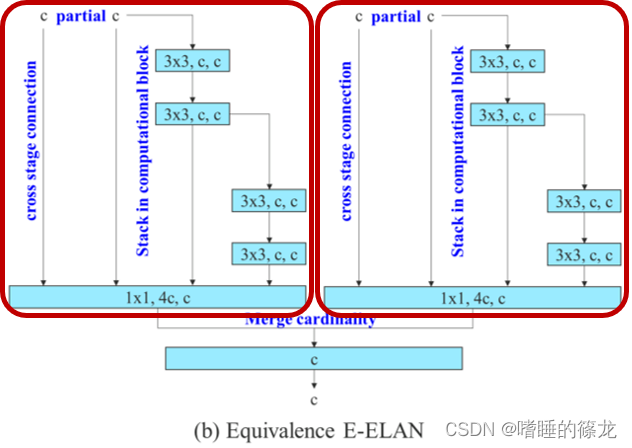
好叭,那就再等等。图d是对ELAN的改进,其等效网络就是下面这个,也就是两个ELAN(红框里)的Concat,作者的解释是:
For E-ELAN architecture, since our edge device do not support group convolution and shuffle operation, we are forced to implement it as an equivalence architecture.
重参数化卷积
重参数化的作用:在保证模型性能的条件下加速网络,主要是对卷积+BN层以及不同卷积进行融合,合并为一个卷积模块。
下面给出了卷积+BN融合的公式化过程,红色表示卷积参数(权重和偏置),蓝色是BN参数( m m m是输入均值, v v v是输入标准差, γ \gamma γ和 β \beta β是两个可学习的参数),最终经过一系列化简,融合成了一个卷积:
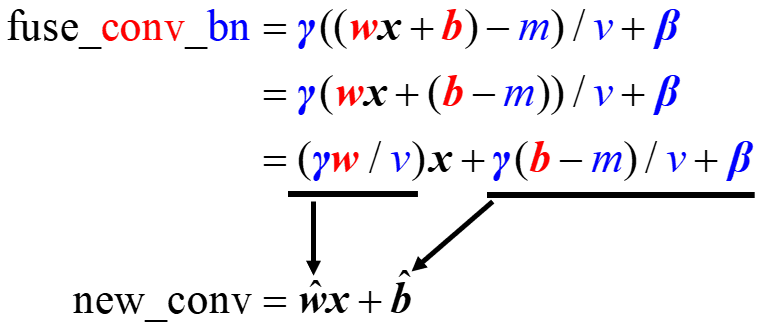
在YOLOv7中,除了网络最后使用RepConv重参数化卷积之外,作者也提到了其他三处使用重参数化技巧的地方:
we perform reparameterization on conv-bn, repconv, orepa, and yolor.
对应model/yolo.py中model类的fuse函数(这里):

辅助头检测
YOLOv7中,将head部分的浅层特征提取出来作为Aux head(辅助头),深层特征也就是网络的最终输出作为Lead head(引导头),如图b所示。
在计算损失时:
- 图c的策略是,lead head和aux head分别、单独计算损失,最终相加
- 图d的策略是,lead head单独计算损失,aux head将lead head匹配得到的正样本作为自己的正样本,并计算损失,最终相加(占比不同)
- 图e的策略是,lead head单独计算损失,aux head将lead head匹配得到的正样本(这里是粗匹配,也就是选择GT框中心点所在网格的上下左右4个邻域网络作为正样本筛选区域)作为自己的正样本,并计算损失,最终相加(占比不同)

以training/yolov7-w6.yaml为例,最后detect模块的前四层为lead head,后四层为aux head,在推理时,只取前四层作为detect层的输出:

动态标签分配
YOLOv7的标签分配策略(正样本筛选),集成了YOLOv5和YOLOX两者的精华:
- YOLOv5
Step1:Autoanchor策略,获得数据集最佳匹配的9个anchor(可选)
Step2:根据GT框与anchor的宽高比,过滤掉不合适的anchor
Step3:选择GT框的中心网格以及最邻近的2个邻域网格作为正样本筛选区域(辅助头则选择周围4个邻域网格)

- YOLOX
Step4:计算GT框与正样本IOU并从大到小排序,选取前10个值进行求和(P6前20个),并取整作为当前GT框的K值
Step5:根据损失函数计算每个GT框和候选anchor的损失,保留损失最小的前K个
Step6:去掉同一个anchor被分配到多个GT框的情况
总结
概括:
- YOLOv7在5FPS到160FPS的范围内,无论是速度或是精度,都超过了目前已知的检测器
- 在V100上进行测试, 精度为56.8%AP的模型可达到30FPS(batch=1)以上的检测速率
- 目前唯一一款在如此高精度下仍能超过30FPS的检测器
不足:
- 代码冗余,版本更新问题
- 精度虚高(参考:如何评价AlexeyAB版的YOLOv7?)
- 验证时数据预处理的图像缩放异常(没有做padding操作)
- 验证时的NMS异常(应该是multi_label = False)