闲聊
- 前几天骑电瓶车被厦门交警抓拍了,发了一条短信给我,××××××,您于×月×号,没带头盔,
- 请文明安全出行,感慨科技越来越厉害了,我就想这东西咱能不能自己整一个,马上安排上。
效果
演示地址https://www.bilibili.com/video/BV1pe4y1Q7zP?spm_id_from=333.999.0.0
代码地址
https://github.com/cdmstrong/traffic-light


思路
- 首先啊,咱需要有一个路口的摄像头监控视频输入,先用网上小视频替代
- 然后呢,咱还需要目标检测算法,需要检测斑马线,行人,头盔,电瓶车,红绿灯
- 然后,还需要一个目标跟踪算法,在画面中跟踪同一个人,不然会出现无数的人
- 再然后,咱需要判断红绿灯的情况,以及行人的状态和位置,综合各种情况考虑是否闯红灯
- 然后再反馈到界面操作上面,给老板看效果,好升职加薪嘛
步骤
下载小视频
- 这个视频真的太难找了,实在是稀有,
点击链接下载
检测算法实现
- 左看又看,还是yolov5比较适合我,主要是有用过目标检测行人的方案
- 这个部分比较复杂,是项目的核心
跟踪算法实现
- 这个我毫不犹豫就选择了deepsort算法, 牛逼的算法,大牛的设计,不解释
- 论文参考 下载
红绿灯的情况判断
头盔判断
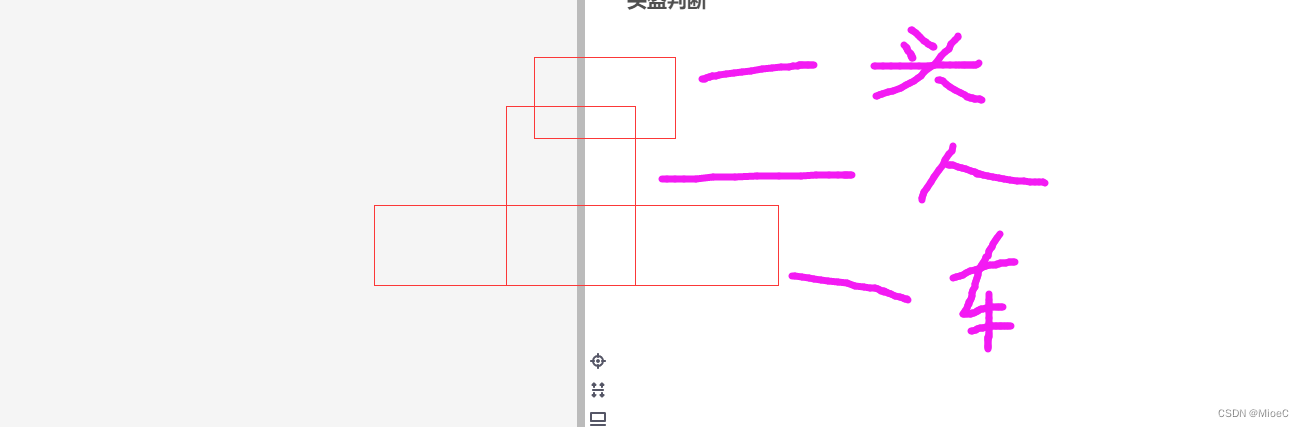
- 我的想法是识别出人和车,但yolov5是分开识别的,也就是人和车识别出来的是不同的物体,所以这块需要将人和车合并进行训练,就是训练出人骑车的识别模型,然后判断有么有带头盔
- 另一个思路是,训练出不戴头盔的识别模型,直接检测不戴 头盔的人就可以,这个是比较好的实现方案,但由于情况有限,数据较少,加上电脑没有GPU环境,所以头盔检测没法实现。
红绿灯抓拍
- 这个不需要训练模型,而且较为简单,只需要检测红绿灯,再判断有么有人过马路即可。
- 所以我们先明确检测的物体是红绿灯, 人-
- 过滤情况设置为两类
OBJ_LIST = ['person', 'traffic light']
- 将红灯的图片截取,进行opencv 判断
def isRed(img):
# cv2.imwrite('video/' + time.strftime('%Y-%m-%d-%H-%M-%S') + '.png', img)
img = cv2.medianBlur(img, 3)
img = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
min = np.array([0, 43, 46])
max = np.array([10, 255, 255])
img = cv2.inRange(img, min, max)
if np.max(img):
return True
else :
return False
- 抓拍方法
def catch_person(isLight, track_id, img, ori):
if isLight:
if track_id not in person_list:
person_list.append(track_id)
cv2.imwrite('video/catch/' + time.strftime('%Y-%m-%d-%H-%M-%S') + '.png', img)
cv2.imwrite('video/catch/' + time.strftime('%Y-%m-%d-%H-%M-%S') + str(track_id) + '.png', ori)
#
print('妖秀啦,敢闯红灯')
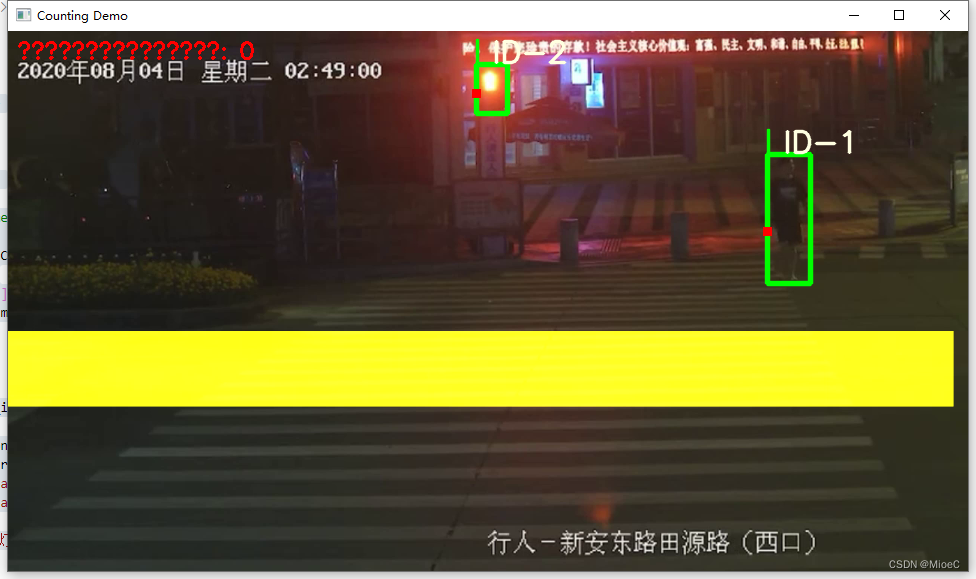
-
在斑马线的马路中间画一条线,有行人通过且是红灯的情况,就是闯红灯
-
运用cv2.fillPoly 画检测矩形
polygon_yellow_value_2 = cv2.fillPoly(mask_image_temp, [ndarray_pts_yellow], color=1)
polygon_yellow_value_2 = polygon_yellow_value_2[:, :, np.newaxis]
- 检测碰撞情况
if polygon_mask_blue_and_yellow[y, x] == 1:
- 这样就实现了完整的抓拍功能
import time
import numpy as np
import objtracker
from objdetector import Detector
import cv2
VIDEO_PATH = './video/short.mp4'
def isRed(img):
# cv2.imwrite('video/' + time.strftime('%Y-%m-%d-%H-%M-%S') + '.png', img)
img = cv2.medianBlur(img, 3)
img = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
min = np.array([0, 43, 46])
max = np.array([10, 255, 255])
img = cv2.inRange(img, min, max)
if np.max(img):
return True
else :
return False
def catch_person(isLight, track_id, img, ori):
if isLight:
if track_id not in person_list:
person_list.append(track_id)
cv2.imwrite('video/catch/' + time.strftime('%Y-%m-%d-%H-%M-%S') + '.png', img)
cv2.imwrite('video/catch/' + time.strftime('%Y-%m-%d-%H-%M-%S') + str(track_id) + '.png', ori)
#
print('妖秀啦,敢闯红灯')
if __name__ == '__main__':
# 根据视频尺寸,填充供撞线计算使用的polygon
width = 1920
height = 1080
mask_image_temp = np.zeros((height, width), dtype=np.uint8)
# 填充第一个撞线polygon(蓝色)
# list_pts_blue = [[204, 305], [227, 431], [605, 522], [1101, 464], [1900, 601], [1902, 495], [1125, 379], [604, 437],
# [299, 375], [267, 289]]
list_pts_blue = [[0, 450], [1890, 450], [1890, 550], [0, 550]]
ndarray_pts_blue = np.array(list_pts_blue, np.int32)
# 填充第二个撞线polygon(黄色)
mask_image_temp = np.zeros((height, width), dtype=np.uint8)
# list_pts_yellow = [[181, 305], [207, 442], [603, 544], [1107, 485], [1898, 625], [1893, 701], [1101, 568],
# [594, 637], [118, 483], [109, 303]]
list_pts_yellow = [[0, 600], [1890, 600], [1890, 750], [0, 750]]
ndarray_pts_yellow = np.array(list_pts_yellow, np.int32)
polygon_yellow_value_2 = cv2.fillPoly(mask_image_temp, [ndarray_pts_yellow], color=1)
polygon_yellow_value_2 = polygon_yellow_value_2[:, :, np.newaxis]
# 撞线检测用的mask,包含2个polygon,(值范围 0、1、2),供撞线计算使用
polygon_mask_blue_and_yellow = polygon_yellow_value_2
# 缩小尺寸,1920x1080->960x540
polygon_mask_blue_and_yellow = cv2.resize(polygon_mask_blue_and_yellow, (width//2, height//2))
# 黄 色盘
yellow_color_plate = [0, 255, 255]
# 黄 polygon图片
yellow_image = np.array(polygon_yellow_value_2 * yellow_color_plate, np.uint8)
# 彩色图片(值范围 0-255)
color_polygons_image = yellow_image
# 缩小尺寸,1920x1080->960x540
color_polygons_image = cv2.resize(color_polygons_image, (width//2, height//2))
# list 与蓝色polygon重叠
list_overlapping_blue_polygon = []
# list 与黄色polygon重叠
list_overlapping_yellow_polygon = []
# 下行数量
down_count = 0
# 上行数量
up_count = 0
font_draw_number = cv2.FONT_HERSHEY_SIMPLEX
draw_text_postion = (int((width/2) * 0.01), int((height/2) * 0.05))
# 实例化yolov5检测器
detector = Detector()
# 打开视频
capture = cv2.VideoCapture(VIDEO_PATH)
person_list = []
while True:
# 读取每帧图片
_, im = capture.read()
if im is None:
break
isLight = False
# 缩小尺寸,1920x1080->960x540
im = cv2.resize(im, (width//2, height//2))
im_ori = im.copy()
list_bboxs = []
# # 检测红绿灯
# red_img, red_box = detector.detect(im, ['traffic light'])
# if len(red_box) > 0:
# x1, y1, x2, y2, lbl, conf = red_box
# red_light = isRed(red_img[y1: y2, x1: x2])
# if red_light:
# print('检测到红灯')
# 更新跟踪器
output_image_frame, list_bboxs, light = objtracker.update(detector, im)
# 输出图片
output_image_frame = cv2.add(output_image_frame, color_polygons_image)
if light is not None:
(x1, y1, x2, y2, label, conf) = light
red_light = isRed(im_ori[y1: y2, x1: x2])
if red_light:
print('检测到红灯')
isLight = True
if len(list_bboxs) > 0:
# ----------------------判断撞线----------------------
for item_bbox in list_bboxs:
x1, y1, x2, y2, label, track_id = item_bbox
# 撞线检测点,(x1,y1),y方向偏移比例 0.0~1.0
y1_offset = int(y1 + ((y2 - y1) * 0.6))
# 撞线的点
y = y1_offset
x = x1
if polygon_mask_blue_and_yellow[y, x] == 1:
catch_person(isLight, track_id, im_ori[y1: y2, x1: x2], im_ori)
# 如果撞 蓝polygon
# if track_id not in list_overlapping_blue_polygon:
# list_overlapping_blue_polygon.append(track_id)
# 判断 黄polygon list里是否有此 track_id
# 有此track_id,则认为是 UP (上行)方向
# if track_id in list_overlapping_yellow_polygon:
# 上行+1
# up_count += 1
# print('up count:', up_count, ', up id:', list_overlapping_yellow_polygon)
# # 删除 黄polygon list 中的此id
# list_overlapping_yellow_polygon.remove(track_id)
# catch_person(isLight, track_id, im_ori[y1: y2, x1: x2])
# elif polygon_mask_blue_and_yellow[y, x] == 2:
# # 如果撞 黄polygon
# if track_id not in list_overlapping_yellow_polygon:
# list_overlapping_yellow_polygon.append(track_id)
# # 判断 蓝polygon list 里是否有此 track_id
# # 有此 track_id,则 认为是 DOWN(下行)方向
# if track_id in list_overlapping_blue_polygon:
# # 下行+1
# down_count += 1
# print('down count:', down_count, ', down id:', list_overlapping_blue_polygon)
# # 删除 蓝polygon list 中的此id
# list_overlapping_blue_polygon.remove(track_id)
# catch_person(isLight, track_id, im_ori[y1: y2, x1: x2])
# ----------------------清除无用id----------------------
# list_overlapping_all = list_overlapping_yellow_polygon + list_overlapping_blue_polygon
# for id1 in list_overlapping_all:
# is_found = False
# for _, _, _, _, _, bbox_id in list_bboxs:
# if bbox_id == id1:
# is_found = True
# if not is_found:
# # 如果没找到,删除id
# if id1 in list_overlapping_yellow_polygon:
# list_overlapping_yellow_polygon.remove(id1)
# if id1 in list_overlapping_blue_polygon:
# list_overlapping_blue_polygon.remove(id1)
# list_overlapping_all.clear()
# 清空list
# list_bboxs.clear()
else:
# 如果图像中没有任何的bbox,则清空list
list_overlapping_blue_polygon.clear()
list_overlapping_yellow_polygon.clear()
# 输出计数信息
text_draw = '闯红灯人数: ' + str(len(person_list))
output_image_frame = cv2.putText(img=output_image_frame, text=text_draw,
org=draw_text_postion,
fontFace=font_draw_number,
fontScale=0.75, color=(0, 0, 255), thickness=2)
cv2.imshow('Counting Demo', output_image_frame)
cv2.waitKey(1)
capture.release()
cv2.destroyAllWindows()
关于检测算法的提取和封装
- 模型加载
- 图片处理
- 调用模型方法检测,并处理图片
class Detector(baseDet):
def __init__(self):
super(Detector, self).__init__()
self.init_model()
self.build_config()
def init_model(self):
self.weights = DETECTOR_PATH
self.device = '0' if torch.cuda.is_available() else 'cpu'
self.device = select_device(self.device)
model = attempt_load(self.weights, map_location=self.device)
model.to(self.device).eval()
model.float()
self.m = model
self.names = model.module.names if hasattr(
model, 'module') else model.names
def preprocess(self, img):
img0 = img.copy()
img = letterbox(img, new_shape=self.img_size)[0]
img = img[:, :, ::-1].transpose(2, 0, 1)
img = np.ascontiguousarray(img)
img = torch.from_numpy(img).to(self.device)
img = img.float() # 半精度
img /= 255.0 # 图像归一化
if img.ndimension() == 3:
img = img.unsqueeze(0)
return img0, img
def detect(self, im, red = None):
im0, img = self.preprocess(im)
pred = self.m(img, augment=False)[0]
pred = pred.float()
pred = non_max_suppression(pred, self.threshold, 0.4)
pred_boxes = []
for det in pred:
if det is not None and len(det):
det[:, :4] = scale_coords(
img.shape[2:], det[:, :4], im0.shape).round()
for *x, conf, cls_id in det:
lbl = self.names[int(cls_id)]
if not lbl in OBJ_LIST:
continue
x1, y1 = int(x[0]), int(x[1])
x2, y2 = int(x[2]), int(x[3])
pred_boxes.append(
(x1, y1, x2, y2, lbl, conf))
return im, pred_boxes
目标跟踪算法提取
- 获取检测目标,
- 用deepsort更新目标
- 绘制效果
from deep_sort.utils.parser import get_config
from deep_sort.deep_sort import DeepSort
import torch
import cv2
import numpy as np
cfg = get_config()
cfg.merge_from_file("deep_sort/configs/deep_sort.yaml")
deepsort = DeepSort(cfg.DEEPSORT.REID_CKPT,
max_dist=cfg.DEEPSORT.MAX_DIST, min_confidence=cfg.DEEPSORT.MIN_CONFIDENCE,
nms_max_overlap=cfg.DEEPSORT.NMS_MAX_OVERLAP, max_iou_distance=cfg.DEEPSORT.MAX_IOU_DISTANCE,
max_age=cfg.DEEPSORT.MAX_AGE, n_init=cfg.DEEPSORT.N_INIT, nn_budget=cfg.DEEPSORT.NN_BUDGET,
use_cuda=True)
def plot_bboxes(image, bboxes, line_thickness=None):
# Plots one bounding box on image img
tl = line_thickness or round(
0.002 * (image.shape[0] + image.shape[1]) / 2) + 1 # line/font thickness
list_pts = []
point_radius = 4
for (x1, y1, x2, y2, cls_id, pos_id) in bboxes:
if cls_id in ['smoke', 'phone', 'eat']:
color = (0, 0, 255)
else:
color = (0, 255, 0)
if cls_id == 'eat':
cls_id = 'eat-drink'
# check whether hit line
check_point_x = x1
check_point_y = int(y1 + ((y2 - y1) * 0.6))
c1, c2 = (x1, y1), (x2, y2)
cv2.rectangle(image, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
tf = max(tl - 1, 1) # font thickness
t_size = cv2.getTextSize(cls_id, 0, fontScale=tl / 3, thickness=tf)[0]
c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
cv2.rectangle(image, c1, c2, color, -1, cv2.LINE_AA) # filled
cv2.putText(image, '{} ID-{}'.format(cls_id, pos_id), (c1[0], c1[1] - 2), 0, tl / 3,
[225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
list_pts.append([check_point_x-point_radius, check_point_y-point_radius])
list_pts.append([check_point_x-point_radius, check_point_y+point_radius])
list_pts.append([check_point_x+point_radius, check_point_y+point_radius])
list_pts.append([check_point_x+point_radius, check_point_y-point_radius])
ndarray_pts = np.array(list_pts, np.int32)
cv2.fillPoly(image, [ndarray_pts], color=(0, 0, 255))
list_pts.clear()
return image
def update(target_detector, image):
# 获得所有检测框
_, bboxes = target_detector.detect(image)
bbox_xywh = []
confs = []
bboxes2draw = []
light = None
if len(bboxes):
# Adapt detections to deep sort input format
for x1, y1, x2, y2, label, conf in bboxes:
obj = [
int((x1+x2)/2), int((y1+y2)/2),
x2-x1, y2-y1
]
bbox_xywh.append(obj)
if label == 'traffic light':
light = (x1, y1, x2, y2, label, conf)
confs.append(conf)
xywhs = torch.Tensor(bbox_xywh)
confss = torch.Tensor(confs)
# Pass detections to deepsort
outputs = deepsort.update(xywhs, confss, image)
for value in list(outputs):
x1,y1,x2,y2,track_id = value
bboxes2draw.append(
(x1, y1, x2, y2, "", track_id)
)
image = plot_bboxes(image, bboxes2draw)
return image, bboxes2draw, light
太复杂了这两个算法,等后面整理清晰了再写个完整的