- 前段时间去听了xzw大佬的体积云线下授课,记了好几张笔记
- 根据与课期间所做的笔记和课后的复习,有了不少的知识积累
- 授课内容主要包括:体积云渲染的理论基础与实现方案、光学特征角度出发对这些特征进行建模、渲染效果和性能两方面的优化方案
- 我在下面会分享这次课程的部分所得(先在知乎发表了一下)
⭐️常见的云渲染方案
基于 纹理 / 粒子系统 / 几何体扰动 / 体渲染 的云渲染
⭐️不同云渲染方案的优缺点
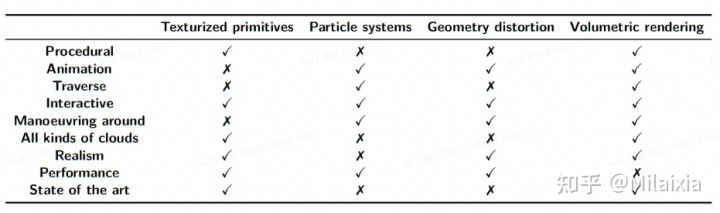
⭐️大气的概念
所谓大气就是围绕行星/卫星等天体的气态物质外壳,模拟地球大气的视觉特征时,我们要考虑三种大气成分:
- 尺寸明显小于可见光波长的介质粒子(氧气/氮气)
- 大小接近或超过可见光波长的介质粒子(水滴)
- 具有特殊视觉效果和单独密度分布的介质粒子(臭氧)
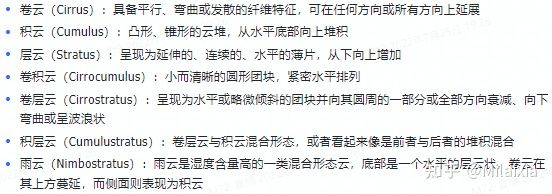
⭐️云的分类

Luke Howard 在1803年根据云的类型划分了七种不同的云形态:
⭐️云的形态模拟
云具有不定形特征,通常采用噪声去模拟云的这种不定形特征。对于体渲染而言,一般采用3D纹理。确定纹理维度后,再考虑采用何种噪声模拟形态。DECIMA团队曾提到的 Perlin-Worley 噪声就具备很好的云形态特征。
Tileable Perlin-Worley 3D (shadertoy.com)www.shadertoy.com/view/3dVXDc

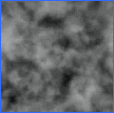
柏林噪声 基于随机,在此基础上利用缓动曲线进行平滑插值,最终效果更加趋于自然,具有较好的空间连续性。

沃利噪声 属于细胞噪声的一类实现,有明显的晶胞特征,这一特征比较好的模拟自然界云的胞状体。
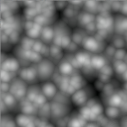
柏林-沃利噪声 兼具两种云特征,有较好的连续性和晶胞效果。具体而言,可把柏林噪声以沃利噪声为下界,重映射到0~1的值域空间,从而得到柏林沃利噪声。
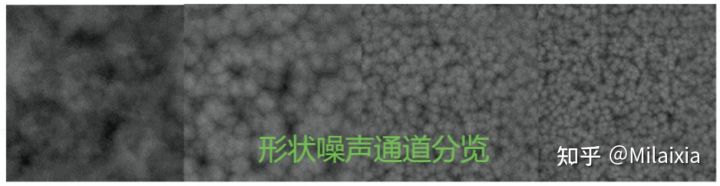
低频噪声与高频噪声 在体积云的制作中,常以低频噪声构建云的基本形状,并用高频噪声侵蚀云的基本形状从而塑造单朵云。
低频噪声 是一个4通道的3D纹理,R通道存储柏林-沃利噪声,G\B\A对应逐渐提升的3个沃利噪声。
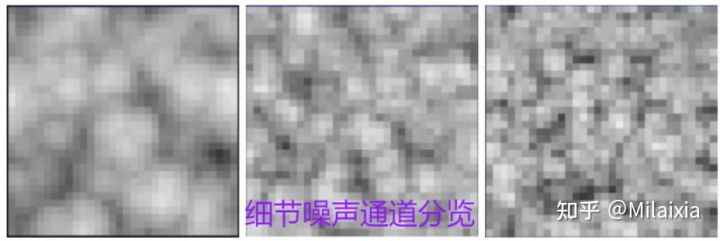
高频噪声 用于为云的基本形状增加细节的3D纹理具备3个通道,分别存储频率逐渐提升的3个沃利噪声,这三个通道的沃利噪声低频噪声的G\B\A三个通道存储的沃利噪声的不同处在于其频率相对更高。
后续的根据时间再做补充...