STM32如何配置为SPI从机?
前言
在平常的开发中,很多时候我们使用SPI都是使用主机模式去驱动一些传感器、存储器等等,很少会用到SPI从机。有时候,我们又需要STM32的SPI配置为从机去接收数据,本文就是介绍如何使用探索者开发版配置SPI从机。
这里我们以探索者开发版标准库实验25 SPI实验为基础例程进行修改。这里我们把SPI从机只定义为一个接收,所以没有发送数据的操作。SPI的基础知识需要大家自己去学习,这里着重说明使用方法。
关注(开源电子网)公众号,后台回复:SPI
(免费领取项目文件)
接下来,我们来看一下具体代码实现。
SPI初始化函数修改为如下代码:
void SPI1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); //使能GPIOB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE); //使能SPI1时钟
//GPIOA3,4,5初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_OD; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化
GPIO_PinAFConfig(GPIOA, GPIO_PinSource4, GPIO_AF_SPI1); //PB3复用为 SPI1
GPIO_PinAFConfig(GPIOA, GPIO_PinSource5, GPIO_AF_SPI1); //PB4复用为 SPI1
GPIO_PinAFConfig(GPIOA, GPIO_PinSource7, GPIO_AF_SPI1); //PB5复用为 SPI1
//设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_RxOnly;
SPI_InitStructure.SPI_Mode = SPI_Mode_Slave; //SPI工作模式:从机
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //SPI的数据大小:8位
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //时钟的空闲状态为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //时钟的偶数边沿数据被采样
SPI_InitStructure.SPI_NSS = SPI_NSS_Hard; //NSS信号由硬件管理
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI1, &SPI_InitStructure); //初始化SPI
NVIC_InitStructure.NVIC_IRQChannel = SPI1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3; //抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //初始化NVIC
SPI_ITConfig(SPI1, SPI_I2S_IT_RXNE, ENABLE); //开启中断
SPI_Cmd(SPI1, ENABLE); //使能SPI外设
}
这里特别需要几点:
① 主机和从机的工作模式要一致,即时钟极性和时钟相位要一样。
② 主机和从机的数据帧大小要一致,即8位或者16位。
③ 主机和从机的数据传输顺序要一致,即MSB或LSB。
以上代码跟原来程序不同点:
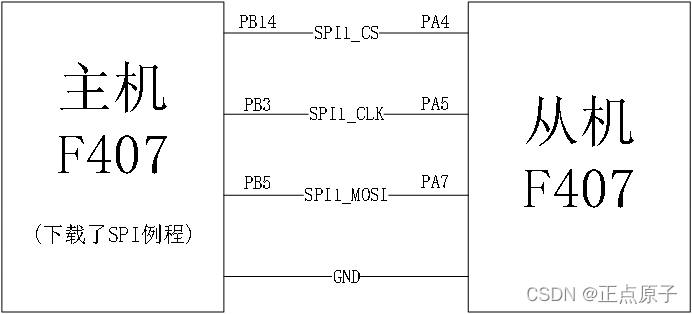
① SPI1的引脚使用的是PA4(SPI1_NSS),PA5(SPI1_CLK)和PA7(SPI1_MOSI)三个引脚即可了,因为不需要使用到发送功能,PA6(SPI1_MOSI)就不用配置了。(这些引脚复用信息可以查看原理图或者芯片数据手册)
② SPI_InitStructure.SPI_Direction设置为SPI_Direction_2Lines_RxOnly,即SPI设置为双线单向接收。这种情况下,主机的MOSI直接连接从机的MOSI即可。
③ NSS引脚的管理我们直接使用硬件管理,也就是需要对PA4(SPI1_NSS)进行操作,拉低就是选中,拉高就是释放片选。
④ 使能SPI的接收中断即SPI_ITConfig(SPI1, SOI_I2S_IT_RXNE, ENABLE),还需要设置NVIC。
⑤ 由于是只接收,所以不需要调用SPI1_ReadWriteByte函数去发送数据。
此外,我们还需要编写SPI中断服务函数,代码如下:
void SPI1_IRQHandler(void)
{
uint8_t rec_data = 0;
if (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_IT_RXNE) == SET)
{
rec_data = SPI_I2S_ReceiveData(SPI1);
printf("data:%x \r\n",rec_data);
LCD_ShowNum(30, 190, rec_data, 3, 16); //显示读到的字符串
/* 清除接收中断 */
SPI_I2S_ClearITPendingBit(SPI1, SPI_I2S_IT_RXNE);
LED1=!LED1;
}
}
当主机拉低片选,发送数据过来,那么从机就会进入到接收中断,并且通过SPI_I2S_ReceiveData函数去SPI1->DR寄存器中获取到数据。当然我们获取完数据之后还得清除一下接收中断标记。
具体接线图如下:
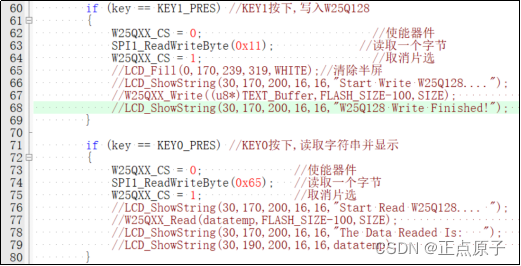
主机程序中通过按键发送不同数据,代码如下:
从机接收的数据在串口助手中显示出来,如下图:

通过这个简单的从机demo,大家就可以发挥想象做很多有趣的东西,把STM32弄成一个带有SPI接口的模组等等。