图形学笔记(二)图形学中的线性代数——向量、矩阵(转置、逆)、叉乘、点乘
图形学笔记(四)变换——三维变换(三维旋转与欧拉角)、MVP变换、视图变换、投影变换(正交投影与透视投影)
文章目录
1. 缩放(Scale)变换
1.1 均匀缩放
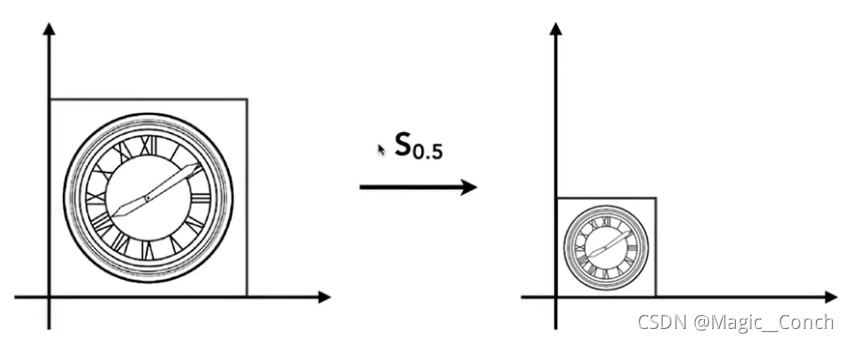
- 代数形式:
x ′ = s x y ′ = s y x^{'}=sx\\ y^{'}=sy x′=sxy′=sy - 矩阵形式:
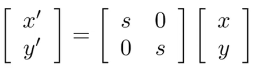
其中,缩放矩阵:
( s 0 0 s ) \begin{pmatrix} s&0\\ 0&s\\ \end{pmatrix} (s00s)
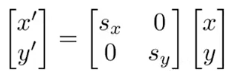
1.2 不均匀缩放
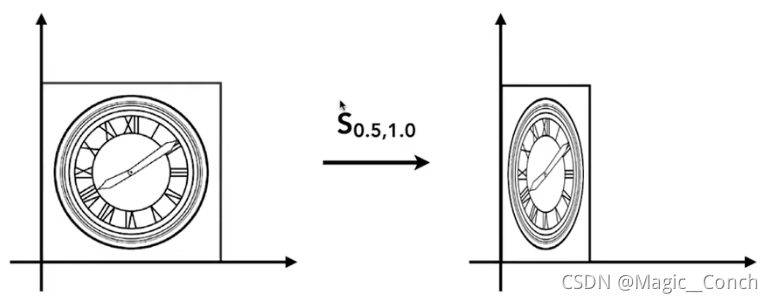
对应的缩放矩阵:
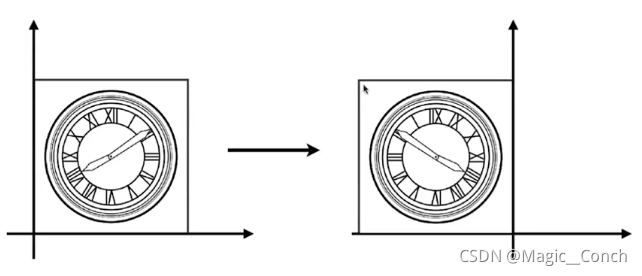
2. 镜像(Reflection)变换
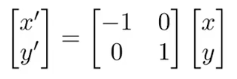
水平镜像:
- 代数形式:
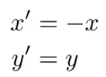
- 矩阵形式:
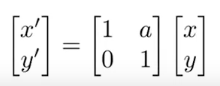
3. 切变Shear
切变:两个距离很近、大小相等、方向相反的平行力作用于同一物体上所引起的形变。
Tips:
y=0时,水平方向的变化是0;
y=1时,水平方向的变化是a;
整张图竖直方向的变化总是0。
矩阵变换:
4. 旋转
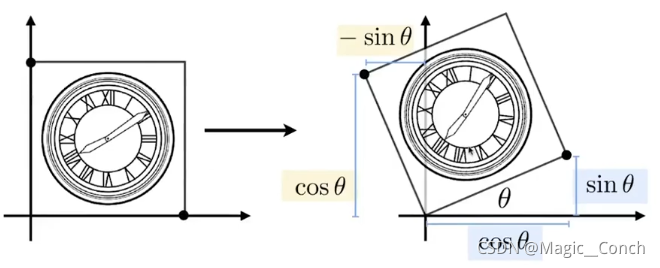
Tips:旋转默认是以(0,0)为中心,默认是逆时针方向。
4.1 旋转矩阵及性质
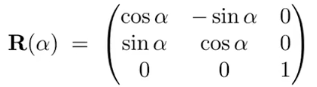
旋转Rotation矩阵:
R θ = ( cos θ − sin θ sin θ cos θ ) R_\theta = \begin{pmatrix} \cos\theta&-\sin\theta\\ \sin\theta&\cos\theta\\ \end{pmatrix} Rθ=(cosθsinθ−sinθcosθ)
当角度为负数时(将 − θ -\theta −θ代入),说明旋转矩阵是正交矩阵:
R θ = ( cos θ sin θ − sin θ cos θ ) = R θ T R_\theta = \begin{pmatrix} \cos\theta&\sin\theta\\ -\sin\theta&\cos\theta\\ \end{pmatrix} = R_\theta^T Rθ=(cosθ−sinθsinθcosθ)=RθT
可以得到旋转矩阵的以下性质:
R − θ = R θ − 1 R_{-\theta} = R_\theta^{-1} R−θ=Rθ−1
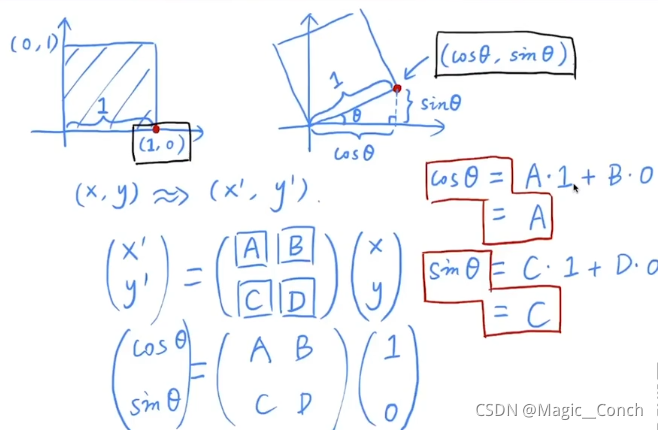
4.2 推导
选两个原位置为(1,0)和(0,1)的特殊点,使二维矩阵待定系数,使用三角函数求解。
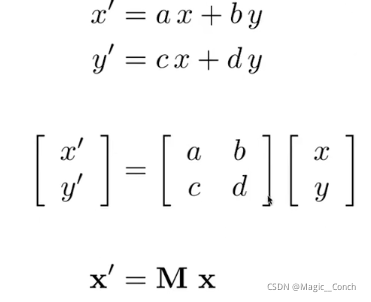
5. 线性变换(Linear Transforms)
线性映射( linear mapping)是从一个向量空间V到另一个向量空间W的映射且保持加法运算和数量乘法运算,而线性变换(linear transformation)是线性空间V到其自身的线性映射。
线性变换(Linear Transforms) = 矩阵(Matrices)。
线性变换都可以写成矩阵相乘的形式,如下所示:
6. 齐次坐标(Homogenous Coordinates):
齐次坐标就是将一个原本是n维的向量用一个n+1维向量来表示。
6.1 引入
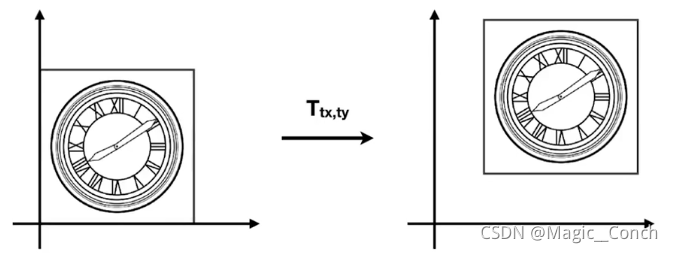
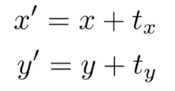
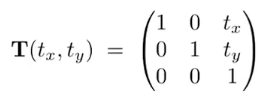
平移变换:
-
平移变换的表示形式:
-
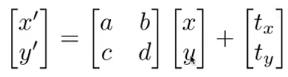
存在的问题:以上的写法不能写成矩阵形式。
只能写成以下形式:
这里平移不再是线性变换,所以有没有办把包括平移在内的所有变换表示出来的统一方法呢?
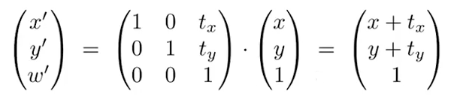
解决办法:齐次坐标。
6.2 齐次坐标
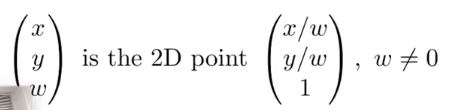
6.2.1 齐次坐标的二维表示
对于二维坐标,增加第三个维度:
二 维 的 点 = ( x , y , 1 ) T 二维的点=(x,y,1)^T 二维的点=(x,y,1)T
二 维 的 向 量 = ( x , y , 0 ) T ( 0 是 使 得 平 移 变 换 之 后 方 向 不 变 ) 二维的向量=(x,y,0)^T(0是使得平移变换之后方向不变) 二维的向量=(x,y,0)T(0是使得平移变换之后方向不变)
6.2.2 点和向量第三维为0和1的验证:
如果点的第三维为0,那么点和向量运算保持了平移不变性(点+向量第三维不会超过1)。
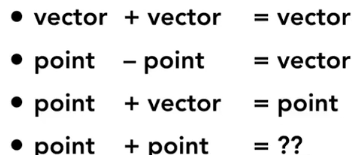
6.2.3 点齐次坐标的意义
在齐次坐标下,点+点是这两个点的中点,如下所示(相加w变成2,然后横纵坐标全除以2)。
7. 仿射(Affine)变换
仿射变换,又称仿射映射,是指在几何中,一个向量空间进行一次线性变换并接上一个平移,变换为另一个向量空间。
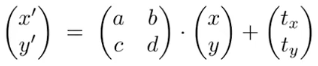
7.1仿射变换的两种表示形式
-
线性映射+平移
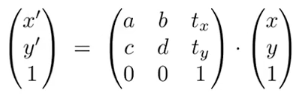
-
齐次坐标的形式
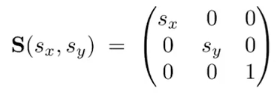
7.2 齐次坐标表示各种变换
- 缩放
2.平移
3.旋转
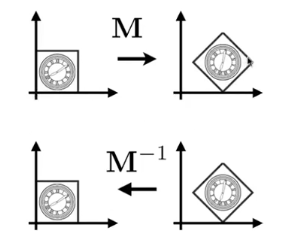
8. 逆(Inverse)变换
表示为: M − 1 M^{-1} M−1
M − 1 M^{-1} M−1在矩阵和几何意义上都是是变换M的逆。
简单的理解:把变换的操作反过来,如下图所示。
9. 变换组合(composite):
如何得到以下变换?
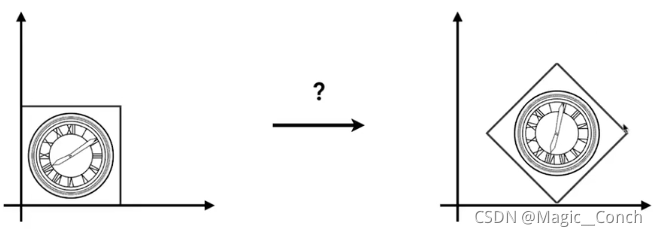
先平移再旋转,得到的结果是不对的:
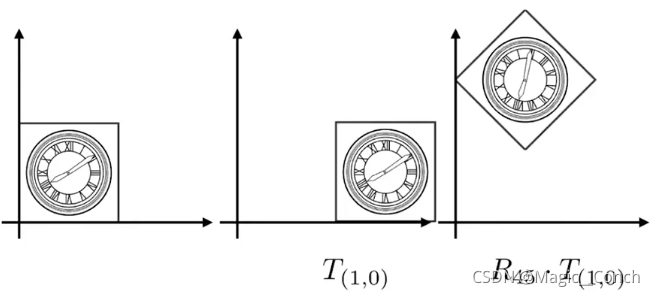
先旋转再平移,得到正确的结果:
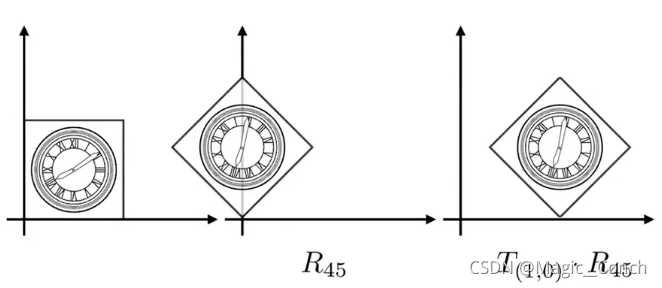
可以知道:
- 复杂的的变换可以通过简单的变换得到。
- 变换的顺序非常重要(矩阵乘法不满足交换律)。
- 矩阵是从右到左应用的。如下所示,先旋转再平移。

结论的推广(矩阵乘法满足结合律):
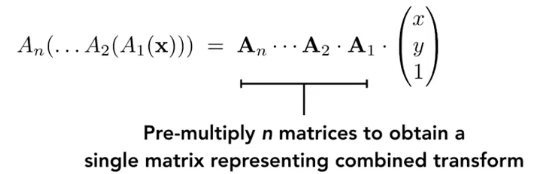
将不同的变换矩阵进行合成:对于很多变换,可以先把变换做乘积,得到一个3*3的矩阵来表示十分复杂的矩阵。
10. 变换的分解:
例子:让矩阵按照某一点进行旋转(如下所示,先将旋转点平移到原点,然后再平移回去)。

变换矩阵的表示形式:
