
撰文 | 郑泽康、柳俊丞、姚迟、郭冉
无论是在统治NLP届的Transformer,还是最近视觉领域的新秀Vision Transformer,我们都能在模型中看到Transpose/Permute算子的身影,特别是在多头注意力机制(Multi-Head Attention)中,需要该算子来改变数据维度排布。
显然,作为一个被高频使用的算子,其CUDA实现会影响到实际网络的训练速度。本文会介绍OneFlow中优化Permute Kernel的技巧,并跟PyTorch的Permute,原生的Copy操作进行实验对比。结果表明,经过深度优化后的Permute操作在OneFlow上的速度和带宽利用率远超PyTorch,带宽利用率能够接近原生Copy操作。
1
朴素的Permute实现
Permute算子的作用是变换张量数据维度的顺序,举个例子:
x = flow.randn(2, 3)
y = x.permute(1, 0)
y.shape
(3, 2)其实现原理也可以很容易理解,即输出Tensor的第i维,对应输入Tensor的dims[i]维,上述例子中 permute 实现对应的伪代码如下:
for row in x.shape[0]:
for col in x.shape[1]:
y[row][col] = x[col][row]但是实际情况与上面的伪代码有出入,张量的Shape是数学上的概念,在物理设备上并不真实存在。
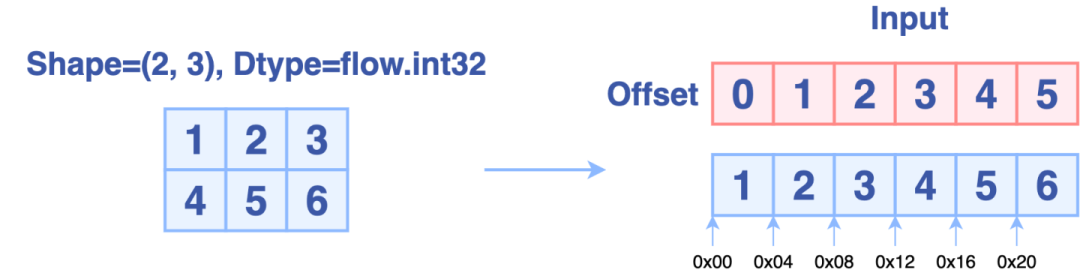
在OneFlow中,张量的数据都是保存在一块连续的内存中,下图分别从上层视角和底层视角描述了形状为(2, 3)的张量的存储方式:
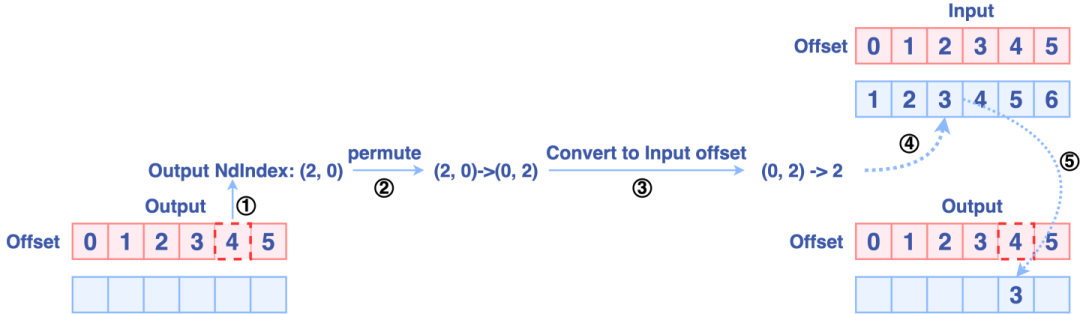
OneFlow的Permute实现原理为:
通过当前输出的一维偏移量(offset)计算对应的高维索引
然后根据参数dims重新排列输出索引,进而得到输入索引。
将输入索引转换成输入偏移量
最后进行数据移动,整个过程的示意图如下:
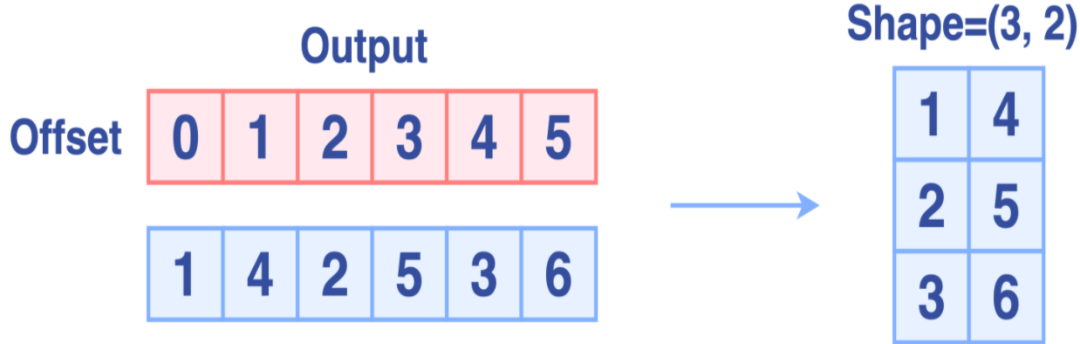
完成Permute后,输出如下图所示:
整个 permute 计算过程需要经过多次一维偏移量offset和高维索引之间的转换,为了避免一次次手工计算,OneFlow提供了一个工具类NdIndexOffsetHelper来方便做上述转换。
2
NdIndexOffsetHelper
NdIndexOffsetHelper的主体方法如下:
NdIndexToOffset方法把高维索引转为一维偏移量
OffsetToNdIndex方法把一维偏移量转为高维索引
有了这么一个工具类,那我们就可以很轻松的写出一版Naive Permute Kernel了,核函数如下:
template<size_t num_dims, size_t movement_size, typename IndexType>
__global__ void PermuteKernel(PermuteKernelParams<num_dims, IndexType> params) {
using T = typename std::aligned_storage<movement_size, movement_size>::type;
const T* src = reinterpret_cast<const T*>(params.src);
T* dst = reinterpret_cast<T*>(params.dst);
IndexType src_index[num_dims];
IndexType dst_index[num_dims];
CUDA_1D_KERNEL_LOOP_T(IndexType, i, params.count) {
params.dst_index_helper.OffsetToNdIndex(i, dst_index);
#pragma unroll
for (size_t dim = 0; dim < num_dims; ++dim) {
src_index[params.permutation[dim]] = dst_index[dim];
}
IndexType src_offset = params.src_index_helper.NdIndexToOffset(src_index);
dst[i] = src[src_offset];
}
}PermuteKernelParams是一个结构体,里面有初始化好的NdIndexOffsetHelper(src和dst各一个),元素总数count还有变换后的维度顺序permutation
首先我们取得当前处理输出元素的高维索引dst_index,然后赋给经过Permute后的输入索引src_index
再将输入索引转换成一维偏移量src_offset,取到输入元素并赋给对应的输出
3
常规情况的优化
这种朴素Permute Kernel的计算代价来源于坐标换算,访存开销则来源于数据移动,针对这两个角度我们引入以下优化方案。
1. IndexType静态派发
随着深度学习模型越来越大,参与运算元素的个数可能超过int32_t表示的范围。并且在坐标换算中,不同整数类型的除法运算开销不一样。因此我们给核函数增加了一个模板参数IndexType用于指定索引的数据类型,根据参与Permute的元素个数来决定IndexType是int32_t还是int64_t。
2. 合并冗余维度
在一些特殊情形下,Permute维度是可以进行合并的,其规则如下:
大小为1的维度可以直接去除
连续排列的维度可以合并成一个维度
针对第二条规则,我们考虑以下Permute情况:
# 0, 1, 2, 3) -> (2, 3, 0, 1)
x = flow.randn(3, 4, 5, 6)
y = x.permute(2, 3, 0, 1)
y.shape
(5, 6, 3, 4)显然这是一个四维的Permute情形,但这里第2,3维,第0,1维是一起Permute的,所以我们可以看成是一种二维的Permute情形:
# (0, 1, 2, 3) -> ((2, 3), (0, 1))
x = x.reshape(x.shape[0]*x.shape[1], x.shape[2]*x.shape[3])
y = x.permute(1, 0)
y = y.reshape(x.shape[2], x.shape[3], x.shape[0], x.shape[1])合并维度后,在利用NdIndexOffsetHelper根据偏移量计算索引时,合并前需要计算成四维索引,而合并后我们只需计算成二维索引。相比合并前减少除法和乘法的次数,进而提升速度。
3. 使用更大的访问粒度
细心的朋友们可能观察到核函数中有一个模板参数size_t movement_size,它表示的是访问元素的粒度。
在Nvidia性能优化博客increase Performance with Vectorized Memory Access中提到可以通过向量化内存操作来提高CUDA Kernel性能,能够减少指令数,提高带宽利用率。(链接:https://developer.nvidia.com/blog/cuda-pro-tip-increase-performance-with-vectorized-memory-access/)
我们设置访问粒度的规则如下:
CUDA支持的访问粒度为1B,2B,4B,8B,16B,粒度越大性能越好
最后一个维度是作为整体来移动的,即permutation[n-1]==x.dims[n-1],且大小是新访问粒度的倍数
保证数据指针满足新访问粒度的对齐要求
针对规则2,对应着以下Permute场景:
(0, 1, 2, 3) -> (0, 2, 1, 3)其中最后一维并没有变化,仅仅是第1,2维进行交换,那么我们可以使用更大的访问粒度来读取数据,再进行Permute操作。代码中通过GetMovementSize函数来确定访问粒度的大小。
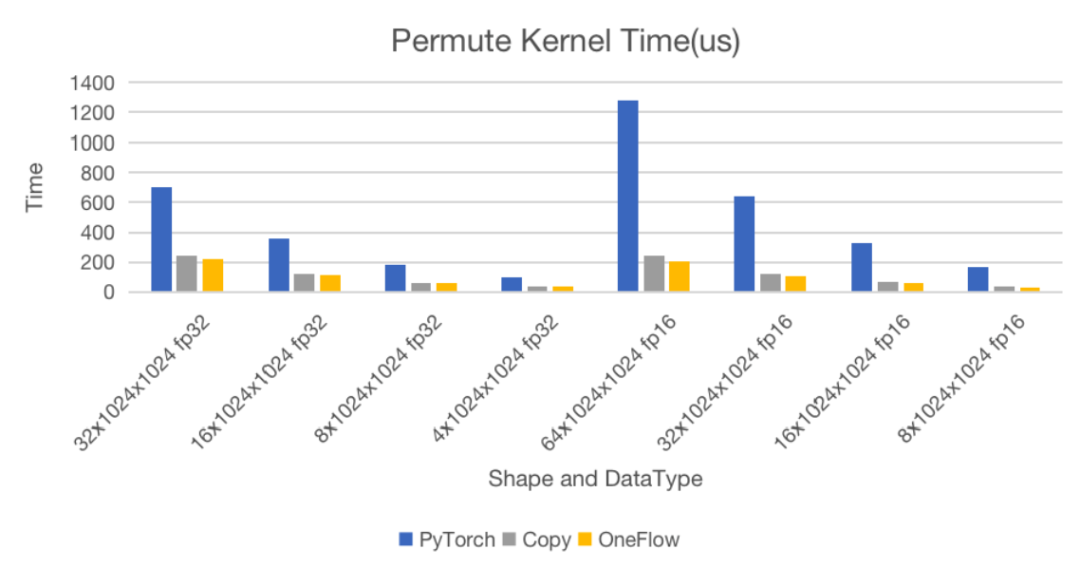
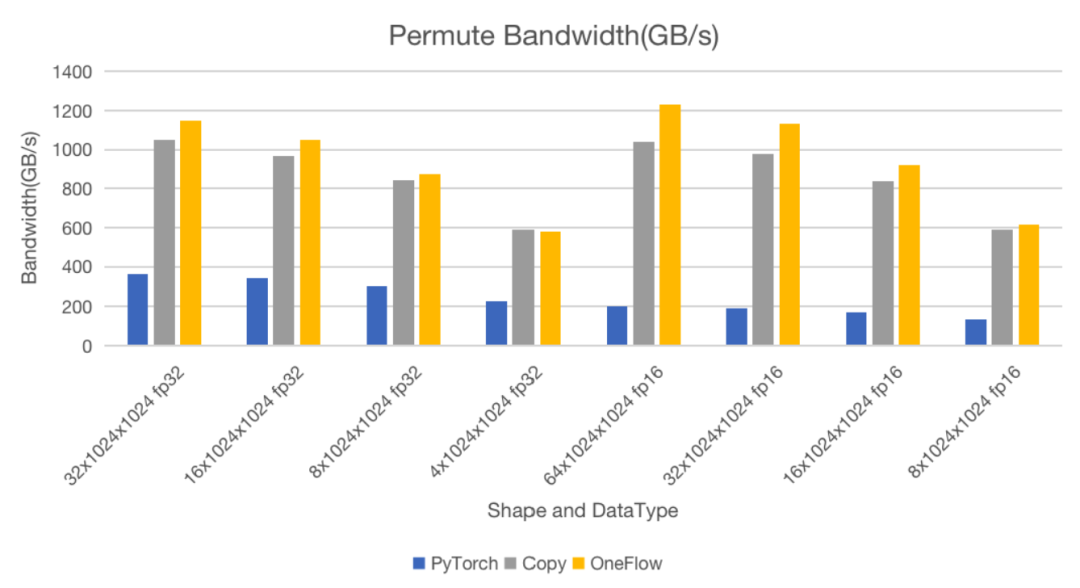
我们使用Nsight Compute对PyTorch的Permute和原生Copy操作对比测试运行时间和带宽,测试结果如下:
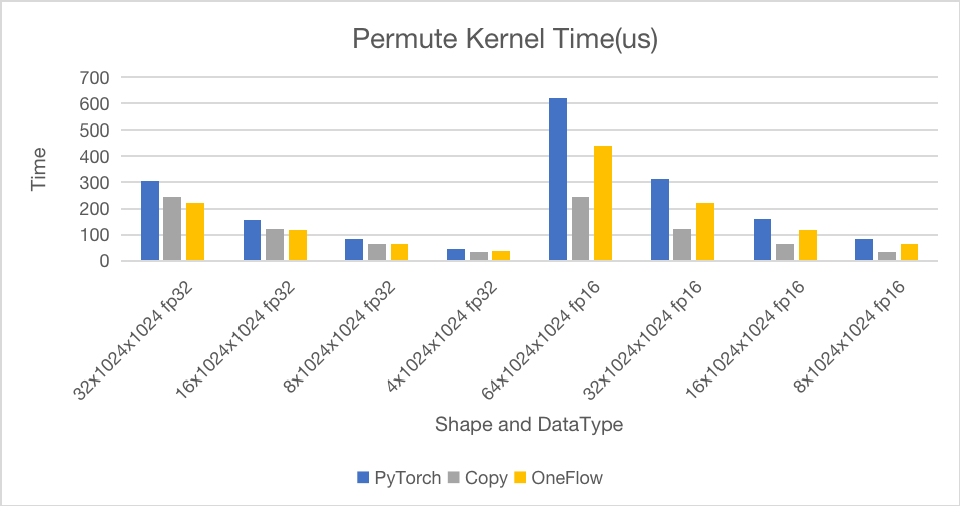
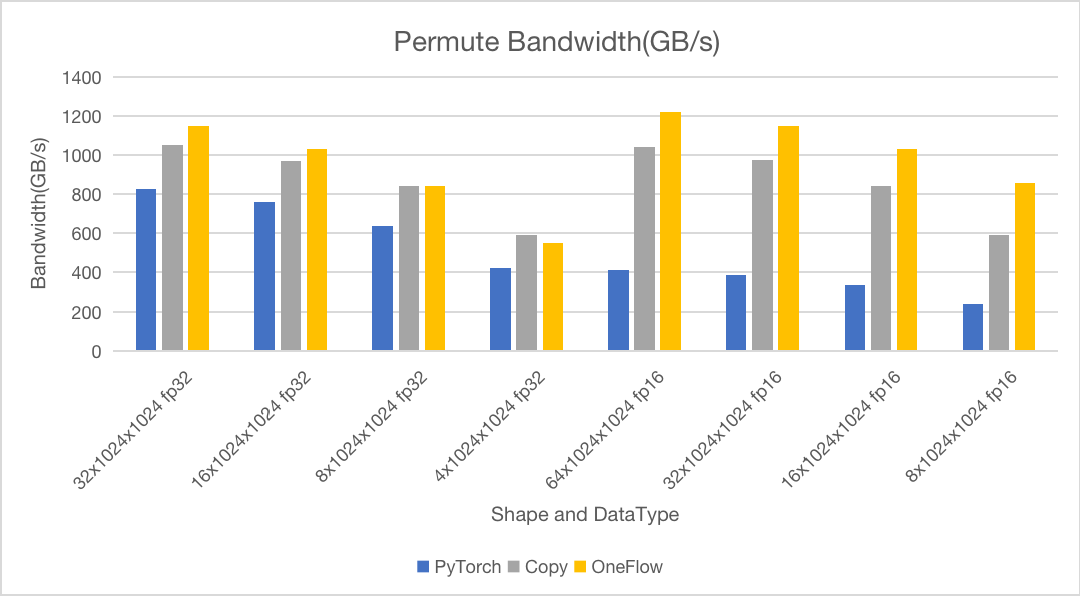
其中测试环境为NVIDIA A100 40GB,场景为(0, 1, 2)->(1, 0, 2),横坐标表示数据形状及数据类型。测试数据覆盖了16MB到128MB不同大小的数据,数据类型包含fp32和half两种类型。
从上面两张图可以看到,OneFlow在大部分情况下都可以逼近甚至略高于Copy操作的带宽。与PyTorch对比,在操作耗时上最少快1.24倍,最快能达1.4倍。
这里Permute的带宽比原生Copy还高一点,是因为Copy Kernel里没有做unroll指令间并行优化,而Permute Kernel内部做了相关优化,这里仅做参考。
使用上面的两个优化技巧,OneFlow就能轻易做到比PyTorch的实现要快了。常规的Permute适用情况比较广泛,也因此可能存在访存不合并的情况。在一些特殊的场景下,我们可以通过合并访存以提升带宽利用率和速度,这就引出我们下个关于BatchTranspose优化的话题。
4
BatchTranspose优化
BatchTranspose操作即矩阵转置,仅交换矩阵最后的两维,以下情况均符合BatchTranspose的定义,其中括号内容表示维度的顺序:
(0, 1) -> (1, 0)
(0, 1, 2) -> (0, 2, 1)在朴素的Permute方案中,对于最后一维作为整体移动的情况下,已经进行充分的优化。但实际场景中还存在矩阵转置的情况,此时无法应用第三条增大访问粒度的优化操作,并且不满足访存合并要求,导致性能不佳。以Pytorch为例,在数据大小为128MB情况下进行BatchTranspose时,因为未合并的访存导致实际读取数据量远大于写入数据量(7-8倍)。
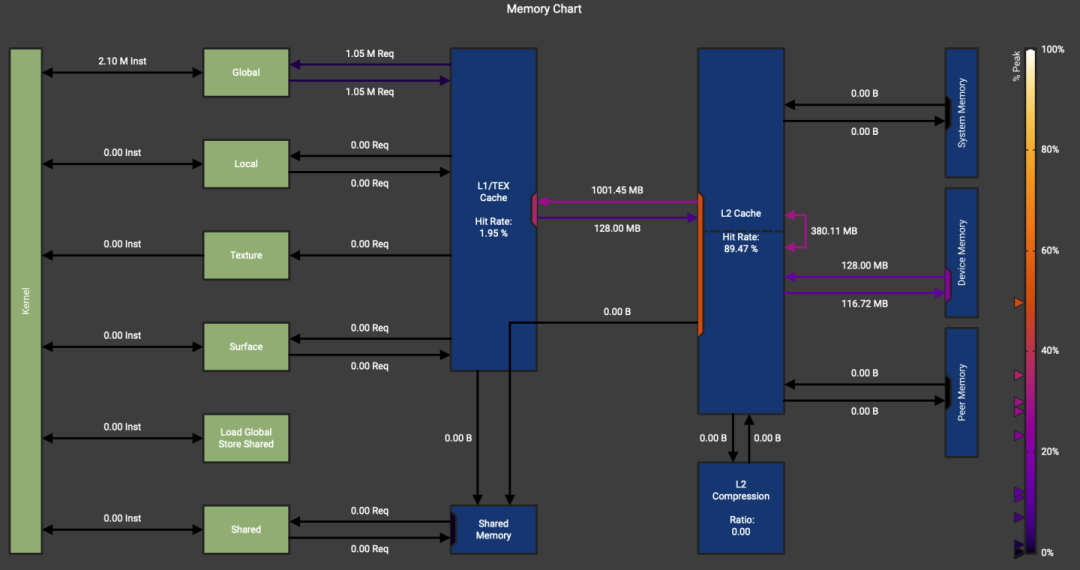
在英伟达性能优化博客An Efficient Matrix Transpose in CUDA C/C++(https://developer.nvidia.com/blog/efficient-matrix-transpose-cuda-cc/)中,其做法是设置一块Shared Memory,然后将一行数据读取到Shared Memory,再按列顺序将Shared Memory中的元素写回到Global Memory中。得益于Shared Memory访问粒度小的特性(Global Memory是32B,Shared Memory是4B),进而避免Global Memory的访存不连续的问题。
Shared Memory相比Global Memory有15倍更高的带宽,20-40倍更低的延迟,因此额外引入的读写开销可以忽略不计。
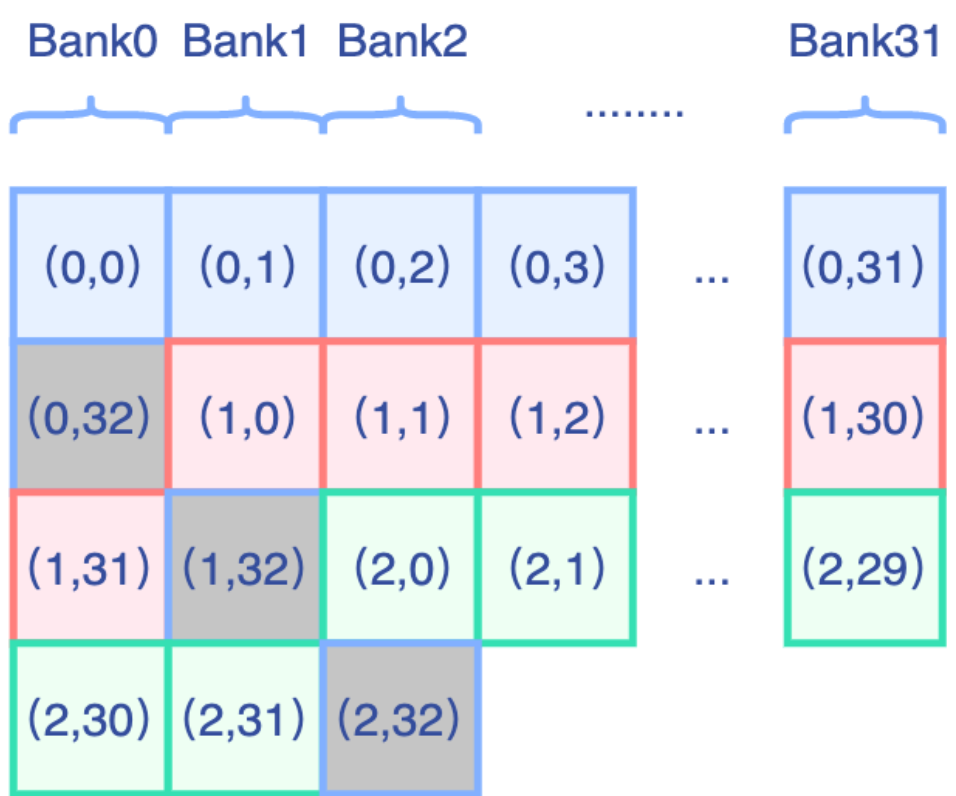
此外我们给Shared Memory多padding了一个元素,进而让以列顺序访问的元素能够均匀分布在32个bank上,避免bank conflict。对应的示意图如下(其中灰色部分代表Padding元素):
基于上述提到的点我们实现了一版BatchTranspose,代码如下:
template<size_t num_dims, size_t movement_size, size_t tile_size, typename IndexType>
__global__ void BatchTransposeKernel(const void* src_ptr, void* dst_ptr, IndexType H, IndexType W,
IndexType num_tile_rows, IndexType num_tile_cols,
int32_t block_nums) {
using T = typename std::aligned_storage<movement_size, movement_size>::type;
__shared__ T tile[tile_size][tile_size + 1]; // To avoid bank conflict.
const T* src = reinterpret_cast<const T*>(src_ptr);
T* dst = reinterpret_cast<T*>(dst_ptr);
IndexType batch_num_tile = num_tile_rows * num_tile_cols;
for (int i = blockIdx.x, step = gridDim.x; i < block_nums; i += step) {
const IndexType batch_index = i / batch_num_tile; // the index of batch.
const IndexType flatten_index =
i - batch_index * batch_num_tile;
const IndexType row_index = flatten_index / num_tile_cols; // the row index of tile in a batch.
const IndexType col_index =
flatten_index
- row_index
* num_tile_cols; // the col index of tile in a batch.
const IndexType offset = batch_index * H * W;
IndexType x = col_index * tile_size + threadIdx.x;
IndexType y = row_index * tile_size + threadIdx.y;
if (x < W) {
IndexType y_range =
((tile_size - threadIdx.y) < (H - y)) ? (tile_size - threadIdx.y) : (H - y);
#pragma unroll
for (int i = 0; i < y_range; i += kBlockRows) {
tile[threadIdx.y + i][threadIdx.x] = src[offset + (y + i) * W + x];
}
}
__syncthreads();
x = row_index * tile_size + threadIdx.x;
y = col_index * tile_size + threadIdx.y;
if (x < H) {
IndexType x_range =
((tile_size - threadIdx.y) < (W - y)) ? (tile_size - threadIdx.y) : (W - y);
#pragma unroll
// `i < x_range` equals to: `threadIdx.y + i < tile_size && y + i < W`.
for (int i = 0; i < x_range; i += kBlockRows) {
dst[offset + (y + i) * H + x] = tile[threadIdx.x][threadIdx.y + i];
}
}
__syncthreads();
}
}其中BatchTranspose的优化涉及以下两点:
显式展开循环
在先前版本,我们的for循环写法如下:
#pragma unroll
for (int i = 0; threadIdx.y + i < tile_size && y + i < H; i += kBlockRows) {
...
}即便是加入了预编译指令#pragma unroll,在Nsight Compute里的汇编代码中,我们也只能看到两条相关指令,也就意味着这部分循环并没有展开。

而for循环里的条件,我们可以化简并提取出来,如下代码所示:
IndexType y_range = ((tile_size - threadIdx.y) < (H - y)) ? (tile_size - threadIdx.y) : (H - y);
#pragma unroll
for (int i = 0; i < y_range; i += kBlockRows) {
...
}此时对应的汇编代码显示这部分的循环进行了展开,在带宽利用率和速度上有24%的提升。

针对half2版本优化
特别的,针对half数据类型,且转置维度均能被2整除的情况下,我们可以进一步利用half2来合并。
Shared Memory的一个bank宽度为4B,那么一个bank能塞下两个half数据,示意图如下:
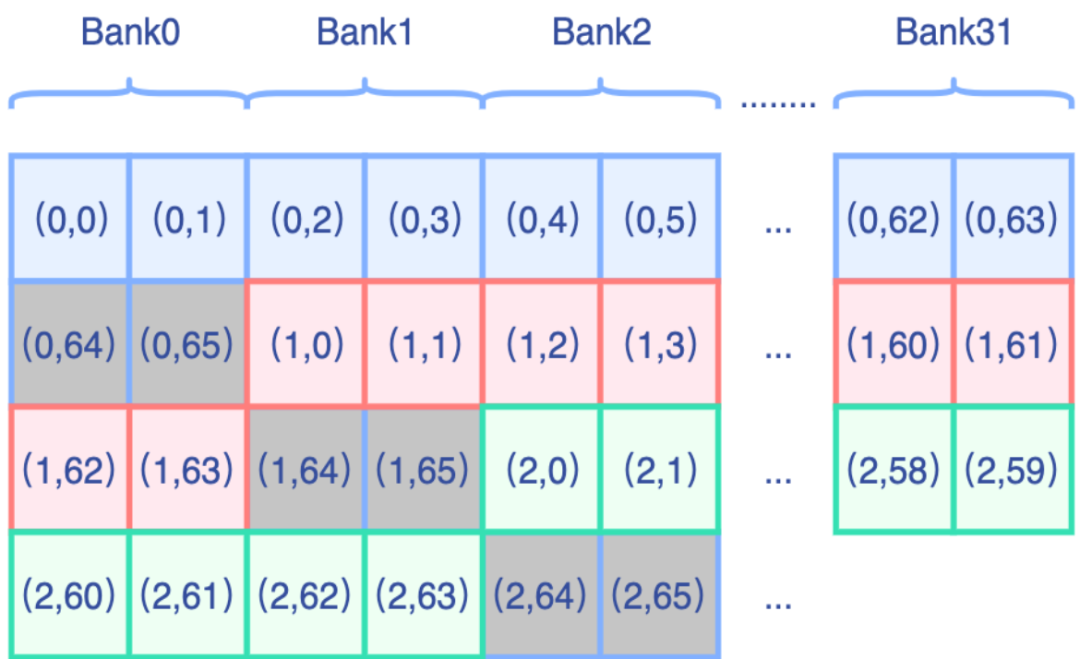
那么加载到Shared Memory的时候,我们可以将两个half数据合并为half2类型进行加载。
但是取列元素的时候,因为元素分布在两个不同的bank上,不能合并成half2直接取。需要构造一个临时的half2对象,分别将两个bank上的half元素存储到该half2对象,再写回到Global Memory里。对应的代码如下:
template<size_t num_dims, size_t tile_size, typename IndexType>
__global__ void BatchTransposeMovement2Kernel(const void* src_ptr, void* dst_ptr, IndexType rows,
IndexType cols, IndexType num_tile_rows,
IndexType num_tile_cols, int32_t block_nums) {
static_assert(tile_size % 2 == 0);
using T_MOV2 = typename std::aligned_storage<2, 2>::type;
using T_MOV4 = typename std::aligned_storage<4, 4>::type;
const T_MOV4* src = reinterpret_cast<const T_MOV4*>(src_ptr);
T_MOV4* dst = reinterpret_cast<T_MOV4*>(dst_ptr);
// Use union structure to process Load and Store.
__shared__ union {
T_MOV2 tile_m2[tile_size][tile_size + 2]; // half [64][66]
T_MOV4 tile_m4[tile_size][tile_size / 2 + 1]; // half2 [64][33]
} tile_mem;
IndexType batch_num_tile = num_tile_rows * num_tile_cols;
for (int i = blockIdx.x, step = gridDim.x; i < block_nums; i += step) {
const IndexType batch_index = i / batch_num_tile; // the index of batch.
const IndexType flatten_index =
i - batch_index * batch_num_tile; // the flatten index of tile in a batch.
const IndexType row_index = flatten_index / num_tile_cols; // the row index of tile in a batch.
const IndexType col_index =
flatten_index
- row_index
* num_tile_cols; // equal to k % num_tile_cols. the col index of tile in a batch.
const IndexType offset = batch_index * rows * cols;
IndexType x =
col_index * tile_size + threadIdx.x * 2; // cause each thread process a half2 element, we need to multiply 2 for threadIdx.x.
IndexType y = row_index * tile_size + threadIdx.y;
if (x < cols) {
// each thread process 4 elements.
IndexType y_range =
((tile_size - threadIdx.y) < (rows - y)) ? (tile_size - threadIdx.y) : (rows - y);
#pragma unroll
// `i < y_range` equals to: `threadIdx.y + i < tile_size && y + i < rows`.
for (int i = 0; i < y_range; i += kBlockRows) {
// each thread load a half2.
tile_mem.tile_m4[threadIdx.y + i][threadIdx.x] = src[(offset + (y + i) * cols + x) / 2];
}
}
__syncthreads();
x = row_index * tile_size + threadIdx.x * 2; // cause each thread process a half2 element, we need to multiply 2 for threadIdx.x.
y = col_index * tile_size + threadIdx.y;
if (x < rows) {
IndexType x_range =
((tile_size - threadIdx.y) < (cols - y)) ? (tile_size - threadIdx.y) : (cols - y);
#pragma unroll
// `i < x_range` equals to: `threadIdx.y + i < tile_size && y + i < cols`.
for (int i = 0; i < x_range; i += kBlockRows) {
/*
When write back as column, it cannot be stored as half2 directly.
So we split as 2 half elements, and write back separately.
*/
union {
T_MOV4 m4;
T_MOV2 m2[2];
} tmp_storage;
tmp_storage.m2[0] = tile_mem.tile_m2[threadIdx.x * 2][threadIdx.y + i];
tmp_storage.m2[1] = tile_mem.tile_m2[threadIdx.x * 2 + 1][threadIdx.y + i];
dst[(offset + (y + i) * rows + x) / 2] = tmp_storage.m4;
}
}
__syncthreads();
}
}在前面相同的测试条件下,我们将测试场景设置为(0, 1, 2)->(0, 2, 1),测试结果如下:
可以看到,OneFlow在大部分情况下,无论是计算耗时,还是带宽利用率都可以逼近原生Copy操作。在操作耗时上与PyTorch对比,fp32数据类型情况下最少快3倍,最快能达3.2倍。而half数据类型情况下OneFlow优势更为明显,最快能达6.3倍。
5
未来优化方向
经过我们实际测试,在坐标换算过程中,整数除法的运算开销比较大。而市面上有很多优秀的运算库如Eigen,lemire/fast_division都提供了基于int32,int64类型的快速除法,根据官方提供的benchmark测试结果,快速除法相较于标准除法能提升1-3倍性能。未来我们将探索合适的快速除法用于坐标转换中,进一步提升运算速度。
6
展望
从本文和之前OneFlow发布的CUDA优化文章中可以看到,在kernel优化过程中有一些常见、通用的手段,如合并冗余以减少计算次数、调整访问粒度以提高访存效率。
这些常见、通用的优化手段,是有可能作为深度学习编译器的组件被提炼出,来部分替代手工调优工作。
但是,自动优化边界的确定、以及如何自动优化,都提出了比手工调优更高的要求,据我们所知也还是一个半开放的问题。欢迎感兴趣的同道,在OneFlow仓库提issue讨论、研发。
参考资料
https://developer.nvidia.com/blog/cuda-pro-tip-increase-performance-with-vectorized-memory-access/
https://developer.nvidia.com/blog/efficient-matrix-transpose-cuda-cc/
https://on-demand.gputechconf.com/gtc/2018/presentation/s81006-volta-architecture-and-performance-optimization.pdf题图源自geralt, Pixabay
其他人都在看
点击“阅读原文”,欢迎下载体验OneFlow新一代开源深度学习框架
