本周我初步了解了51循迹小车的系统原理,控制模块最小系统,电机驱动模块,电源模块,循迹模块,超声波测距模块,并用软件实现了小车前进实验。
上周进行了小车的安装,看上视频教程一步一步做也很简单。小车底板每一部分的功能大致是这样:

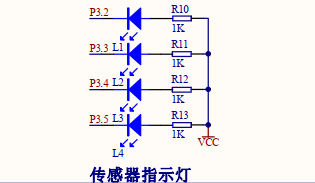
接下来就是调试智能小车。首先是黑白线识别模块调试。它由W1(W2)电位器,L1(L2)信号指示灯左光电传感器组成。W1(W2)是调节灵敏度的,L1(L2)信号灯没有接接收到红外信号时(红外传感器下方是黑色)会不亮( 输出高电平1),当接到到红外反馈信号后(红外传感器下方是白色),指示灯亮起( 输出低电平0)。其次是避障模块调试,原理同上。最后是电机模块调试。其中EN1和EN2是使能端(高电平有效),控制速度时它们必须都接在VCC(+5V电源)上,电机才能工作。IN1~IN4是分别控制左右电机的正反转:
IN1接到VCC(正5V 电源)(左电机顺时针转反转信号线,高电平有效)
IN2接到VCC(正5V 电源)(左电机逆时针转正转信号线,高电平有效)
IN3接到VCC(正5V 电源)(右电机顺时针转正转信号线,高电平有效)
IN4接到VCC(正5V 电源)(右电机逆时针转反转信号线,高电平有效)
然后是底盘原理图。

其中7805是降压芯片,电压一般是6V~12V


这里是一个逻辑电路,电机的电流+出-进(IN1=1,IN2=0)为顺时针转,-出+进(IN1=0,IN2=1)为逆时针转。还有我们可以通过PWM控制速度,也就是改变占空比(高电平时间/周期)

左半部分为循迹模块,右半部分为避障模块,下半部分运用到了比较器
最后就开始了小车的前进实验和前后左右综合实验。代码不知道为什么传不上去。本周学习内容基本就这些。
机器人团队第三周学习总结
猜你喜欢
转载自blog.csdn.net/qq_51461824/article/details/110748175
今日推荐
周排行