对于前面提及的倒立摆小车或者自平衡机器人,在保持摆垂直的情形下,还在空间中自由运动吗?
显然是不行的,为什么?想一个有趣的例子,类似这个,但是控制器换成人的脑袋啦,啥例子???
举着一杯满满的水,我们还能健步如飞吗?观察水杯就无法看周围环境,走路可能不稳;看周围环境,嗯,水估计都洒到地上了吧^-^ ^_^ ^-^ ^_^
来看看这篇吧,能控和能观,很有趣的……
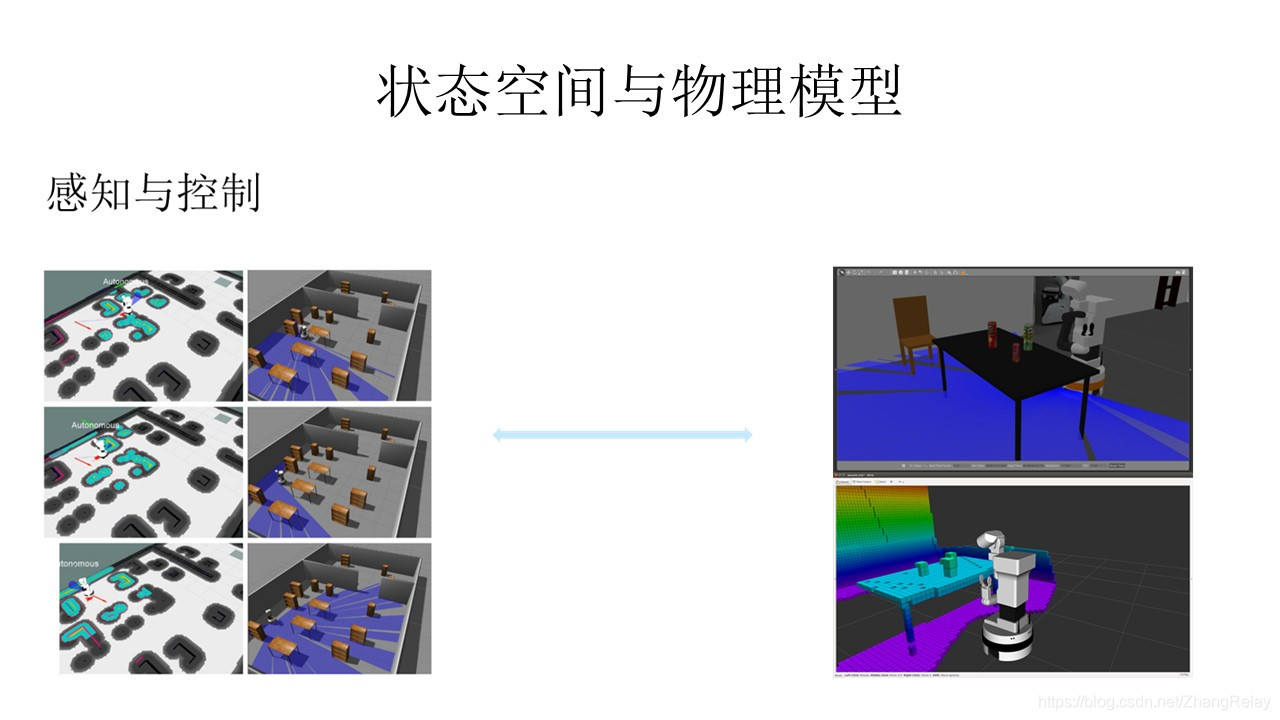
机器人系统用执行器实现控制,用传感器完成观测。主要分五个方面介绍:
先看看系统的控制?
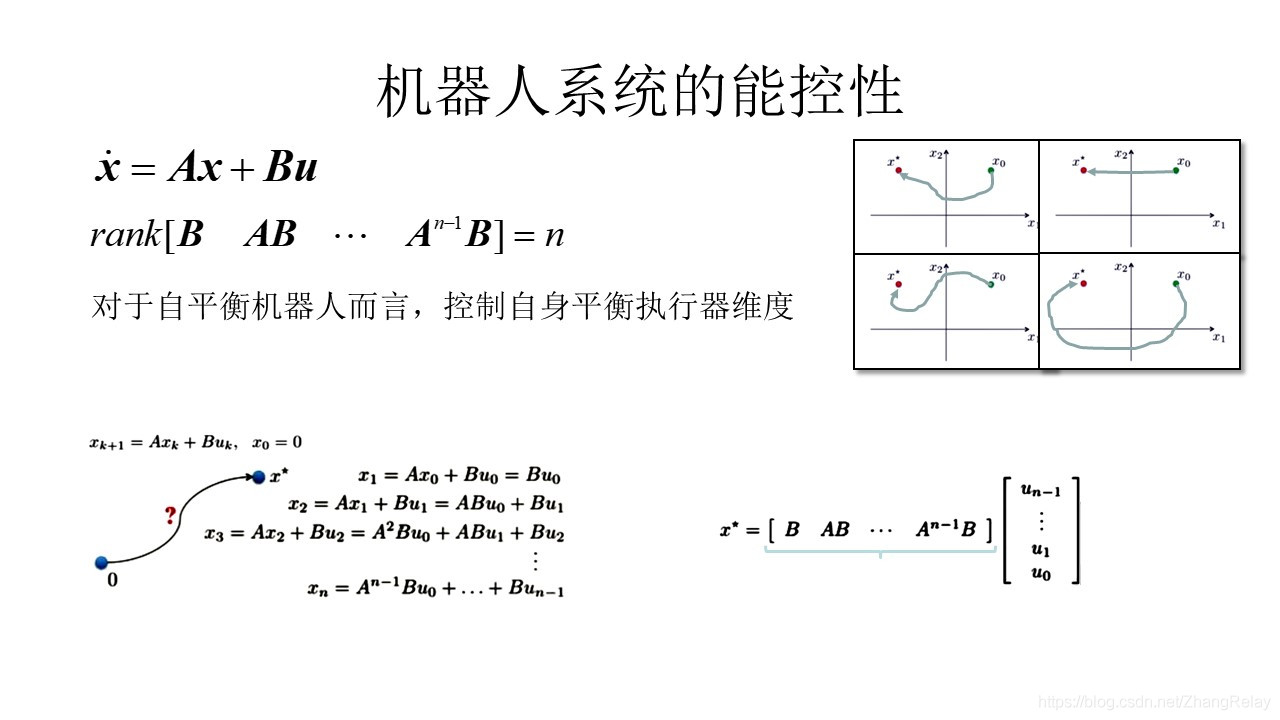
这个简单,大部分都是直接背公式,其实理解起来也很容易的,系统的能控性只和状态矩阵A和控制矩阵B,看左下图示,对于机器人如果从位置0到x*,以离散系统为例,一步一步走起来,路就是需要一步步走的,这类系统未来与现在过去都有关联的,不会穿越,x1->x2->x3到xn,如果能够实现,一定是rank[B AB ……An-1B]=n嘛。
是否能从0到x*,是能控性给出的答案。如何从0到x*,轨迹如何,就和机器人系统结构和控制输入密切相关了,不清楚,那你一定没有看第二篇,类似右上图示:
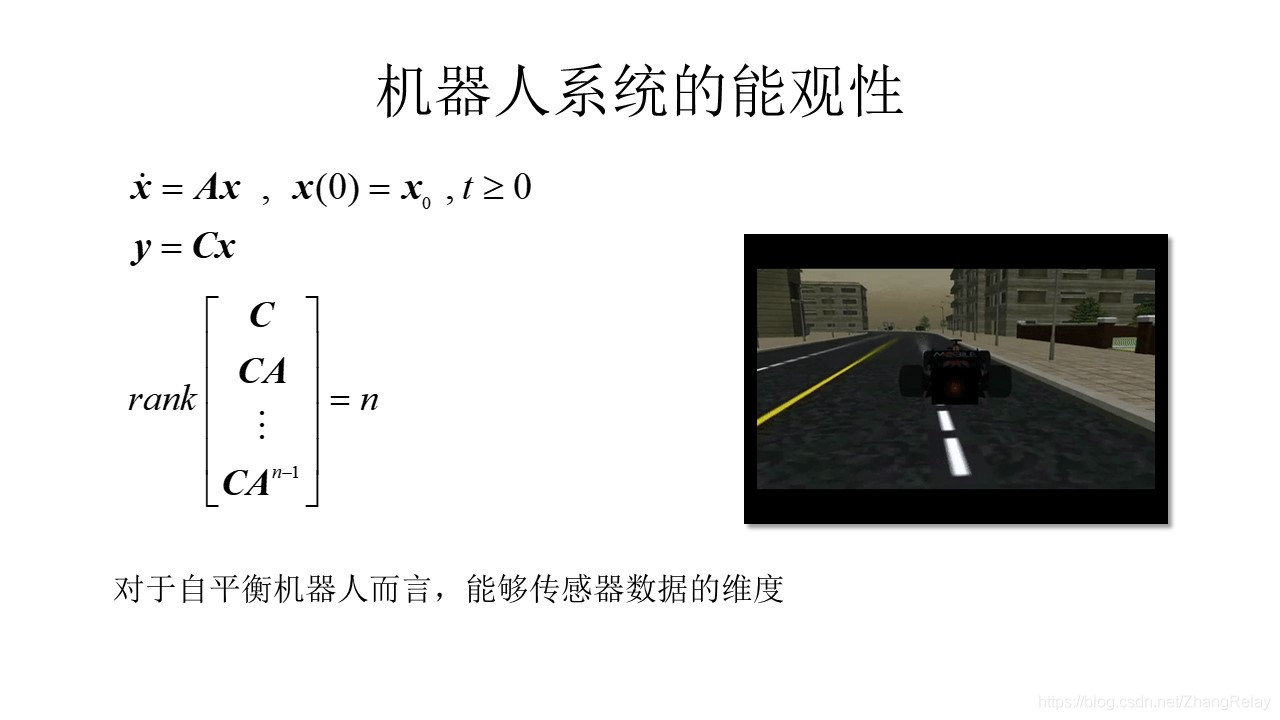
与能控性类似,能观性只和C,A相关。为何在第一篇将自平衡机器人模型简化了?自己用matlab算一下嘛。
需要掌握能控能观判定代码的编写哦。能控能观与机器人运动控制正解逆解有没有关联呢?
知道这些,就可以改进机器人硬件设计哦
控制维度和感知维度要匹配,比如二维激光雷达可以提供二维环境下机器人导航;
但是三维深度视觉传感器提供的点云数据才能给机器人抓取桌面上物体提供可靠的信息,机械臂的控制维度也需要满足在三维空间的自由运动。
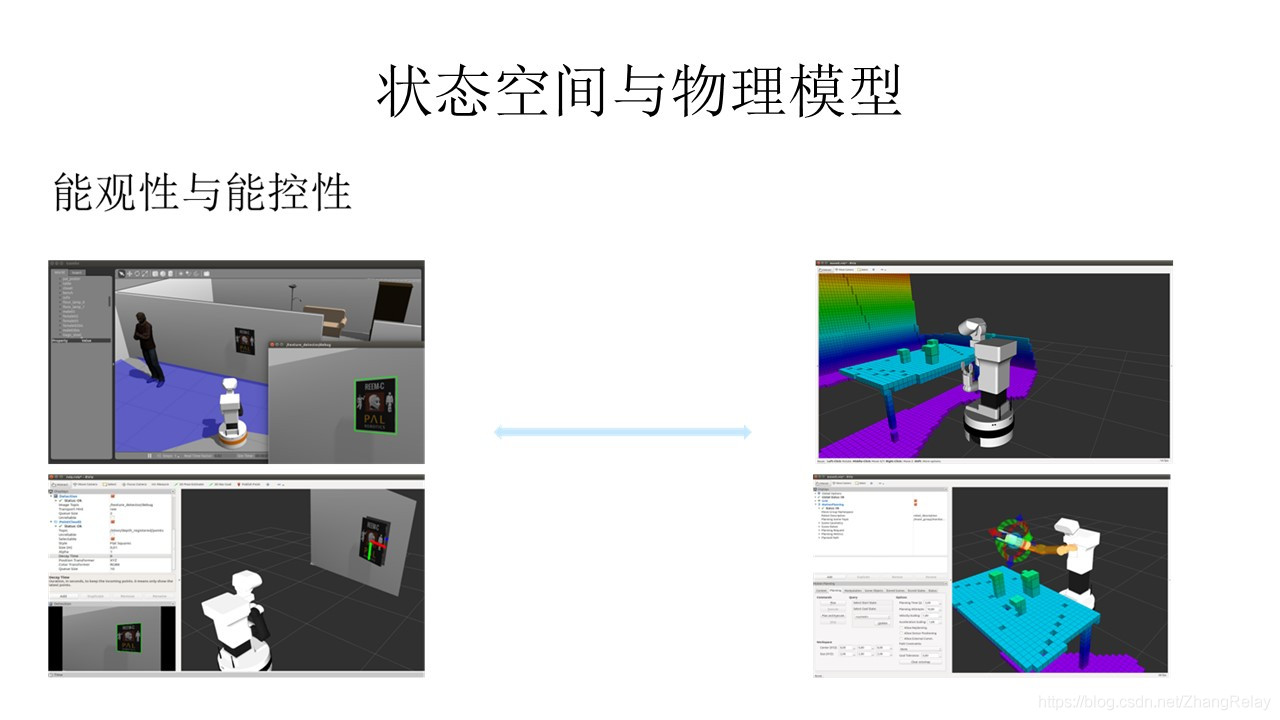
这些和能控能观不谋而合,在设计机器人系统时,要充分考虑这些。
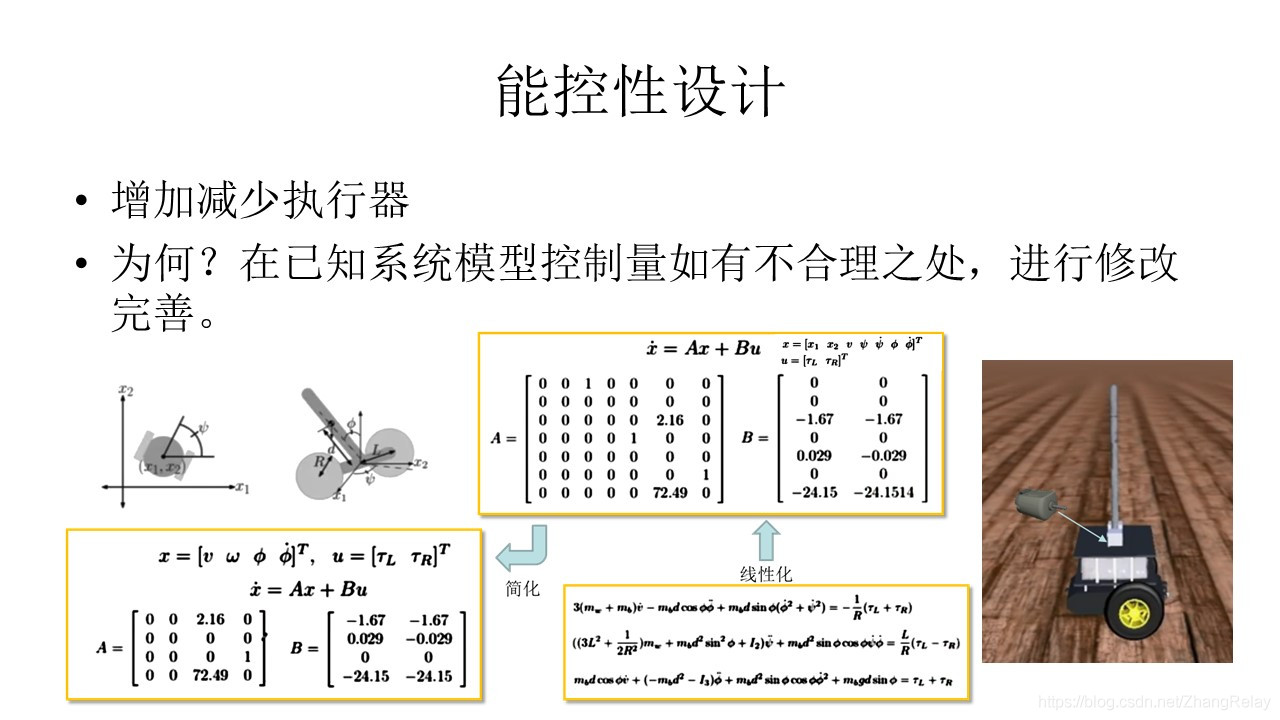
回到一开始提出的问题,既要控制摆垂直又要机器人自由运动,怎么办?给倒立摆加个直接控制它的电机吧……
当然这样系统状态空间模型也就全变了……
能观性设计要考虑通用性,适当冗余可以实现较好的观测性能,比如三维传感器可以用于二维空间导航,反之不行,在设计机器人系统时,要充分考虑机器人的运动空间范围,选择合适的观测传感器,有效反馈数据。
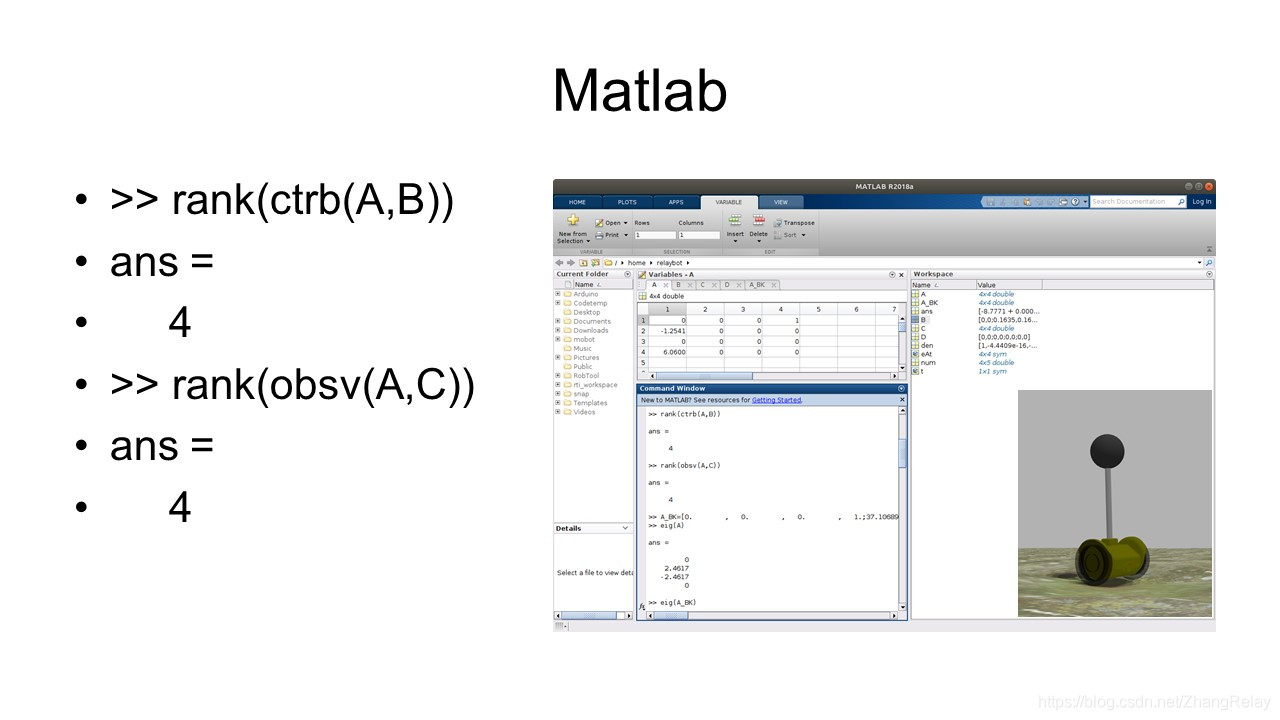
最后,将两轮自平衡机器人能观性和能控性用matlab程序算一下吧,嗯,都是4,完全能控完全能观,太棒了!!!