无人驾驶概览
Apollp开源平台的主要部分
HD Maps——高精度地图
Localization——定位
Perceptioon——感知
Perdiction——预测
Planning——规划
Control——控制
1.高精度地图几乎支持着软件栈的所有其他模块,包括定位、感知、预测和规划。
2.定位课程将讨论如何确定汽车所处的位置。汽车时利用激光和雷达数据,将这些感知内容通过与高精度地图得对比来确定此时的位置。
这种对比使汽车能够以数厘米精度进行自定位。
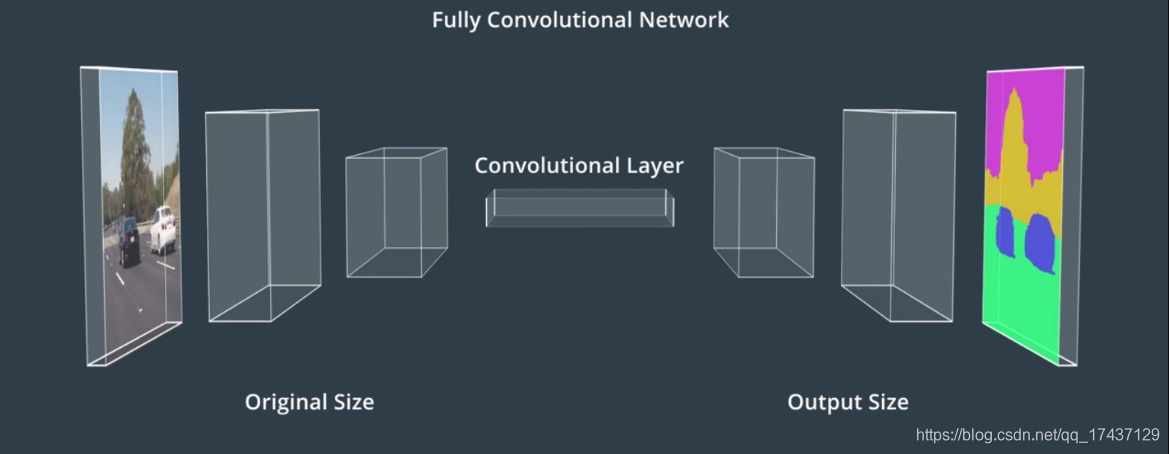
3.在感知课程中。我们将了解无人驾驶车如何感知这个世界。深度学习是一个不错的选择,而卷积神经网络又是构成深度学习的一个分支,对感知任务至关重要。如分类、检测和分割。这些方法适用于几种不用无人驾驶车传感器的数据来源。
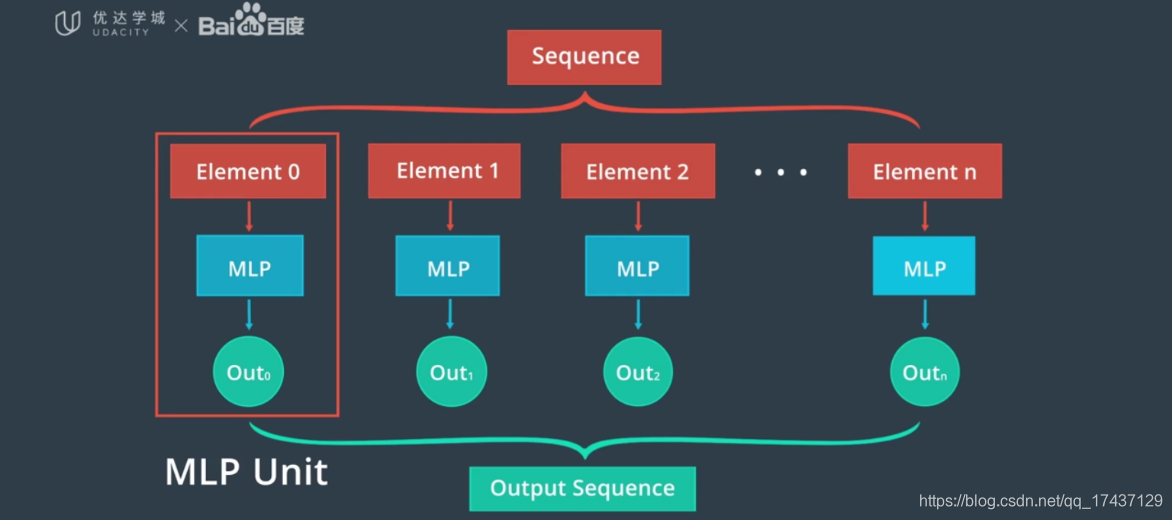
3.预测模块用以预测其他车辆或行人可能的移动状态。递归神经网络是其中的一种预测方法,可对其他物体随时间的运动进行跟踪,并使用该时间序列数据预测未来。
这种预测方法可对其他物体随时间的运动进行跟踪,并使用该时间序列数据预测未来。
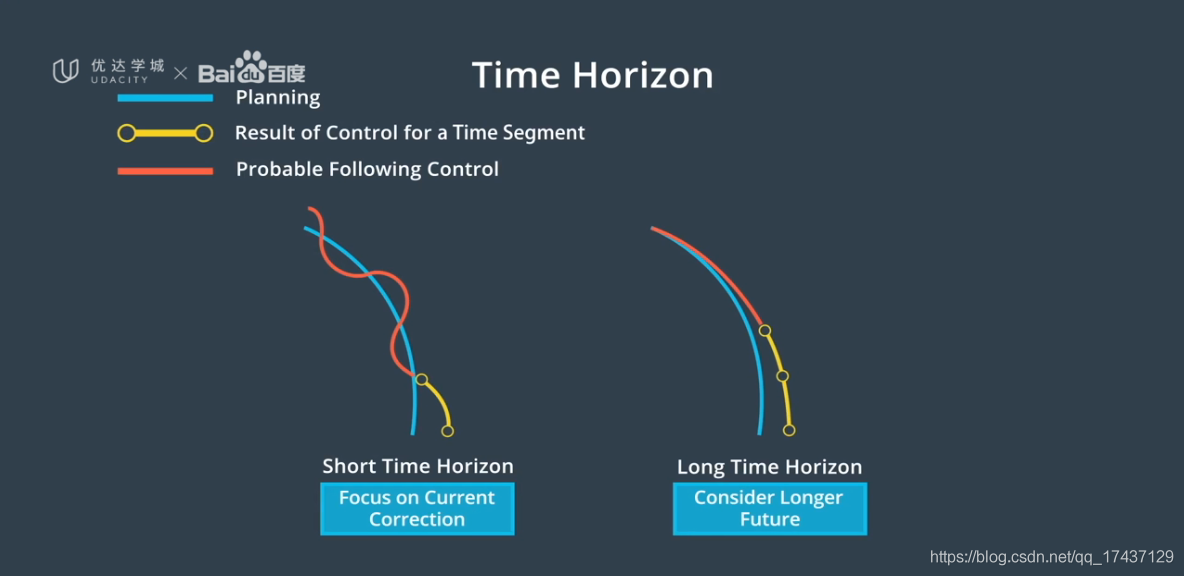
4.规划模块是结合预测与路线生成车辆轨迹,是构建无人驾驶车最困难的部分之一。
5.控制模块是通过转向、油门和制动来执行规划轨迹。不同的控制器从简单到复杂,其性能却从弱到强。转向制动也是无人驾驶车辆实现的必经之路,利用汽车的油门和制动来执行规划轨迹,相对于人类来说很难实现,但是对于计算机来说,实现它又变得相对简单很多。
什么是无人驾驶
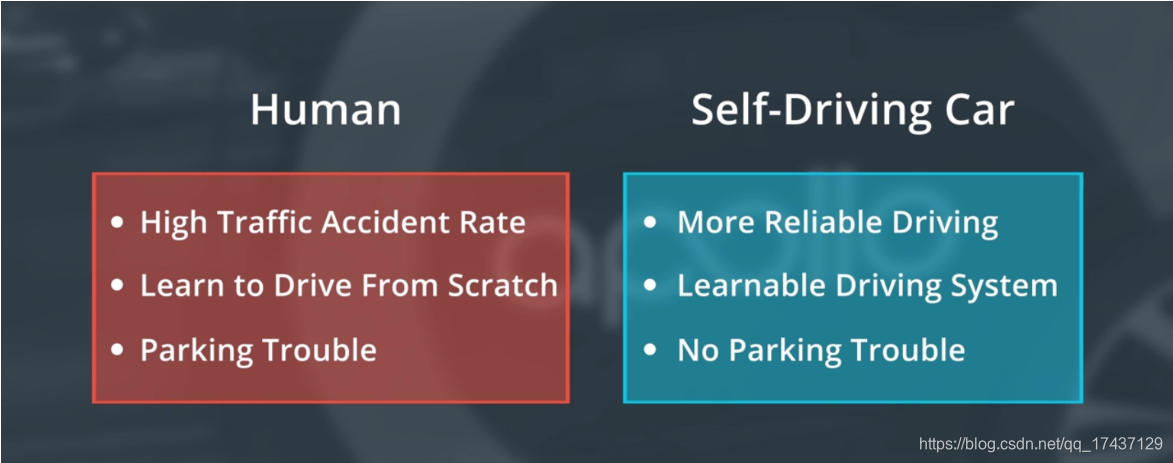
人类在一百万年前学会了直立行走,四千年前发明了第一辆马车,一百年前发明了汽车,正式开启了汽车时代,这不仅提高了人们出行的速度,更是拓宽了人们的行驶距离。而无人驾驶车研究也才开始十年,在这场人与无人驾驶车辆的较量中,无人驾驶车辆彰显了诸多的优点:
无人驾驶等级划分分为6级:
0级:驾驶员是驾驶系统唯一决策者。
1级:驾驶员辅助(driver assistance),车辆为驾驶员提供转向或加速支持。
2级:部分自动化(partial automation),车辆可自动进行部分功能,如自动巡航控制和车道保持。
3级:有条件的自动化(conditional automation),车辆自主驾驶但驾驶员需在特定情形下接管控制。
4级:高度自动化(no human interference),车辆完全控制车辆,并不期望驾驶员予以控制。但存在“地理围栏”(geofence),车辆只能在“地理围栏”区域内自主操作。
5级:完全自动化(full automation),车辆可以在人类驾驶的任何地方自主运行。
无人驾驶车的运作方式
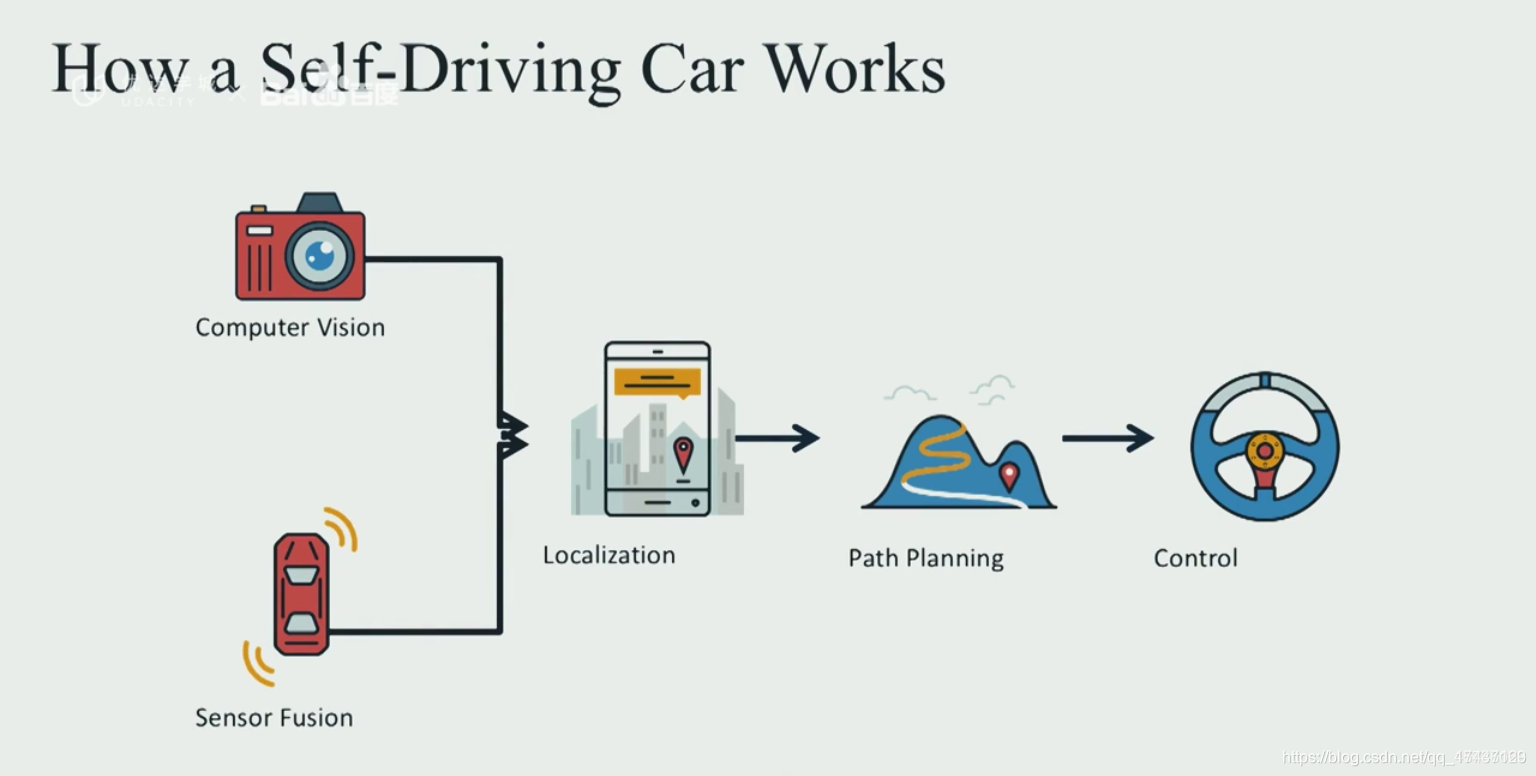
无人驾驶包括五个核心部分:计算单元,计算机视觉,定位,路径规划和控制

计算机视觉是通过摄像头图像捕获周围世界的信息,传感器融合是合并来自其他传感器的数据(如激光、雷达)从而更加深入了解周围环境,定位是通过对环境的了解精确地确定车辆所处位置,路径规划是绘制车辆所在位置与目标地点的行驶路线,控制是使汽车保持在规划的轨道上行驶。本质上来讲,其他一切无人车都是这些核心功能更复杂的实现。