论文阅读之 Wasserstein GAN 和 Improved Training of Wasserstein GANs
本博客大部分内容参考了这两篇博客: 再读WGAN(链接已经失效)和令人拍案叫绝的Wasserstein GAN, 自己添加了或者删除了一些东西, 以及做了一些修改.
基础知识:
f-Divergence
原始GAN采用的是JS divergence来衡量两个分布之间的距离。事实上有一个统一的模式来衡量两个分布间的距离,它就是f-divergence。
假设
P和
Q是两个分布。
p(x)和
q(x)是对应样本
x的概率,则:
Df(P∣∣Q)=∫xq(x)f(q(x)p(x))dx
就是f-Divergence, 其中
f需要满足: 1. 是凸函数, 2.
f(1)=0.
可以看到对任意的
x都有
p(x)=q(x), 则
Df(P∣∣Q)=∫xq(x)f(q(x)p(x))dx=0, 即两个分布相同的时候f-Divergence等于0.
想要让f-divergence能表示两个分布的距离, 不但要求当两个分布相同时距离是0, 还需要保证这个0是f-Divergence能取到的最小值, 证明如下:
由于
f(x)是凸函数,则有下面的不等式:
Df(P∣∣Q)=∫xq(x)f(q(x)p(x))dx≥f(∫xq(x)q(x)p(x)dx)=f(1)=0
Fenchel Conjugate
每个凸函数
f都具备一个共轭函数
f∗:
f∗(t)=x∈dom(f)max{xt−f(x)}
关于Fenchel Conjugate有两个性质:
- 所有的凸函数f都有一个conjugate函数
f∗;
-
((f∗)∗)=f.
和GAN的联系
假设
f∗是
f的Fenchel Conjugate函数, 则由上面的式子可以得到:
f(x)=t∈dom(f∗)max{tx−f∗(t)}
将这个
f作为上面f-Divergence中的
f, 代入f-Divergence的式子得到:
Df(P∣∣Q)=∫xq(x)f(q(x)p(x))dx=∫xq(x)(t∈dom(f∗)max{q(x)p(x)t−f∗(t)})dx
此时我们如果构建一个函数
D(x)∈dom(f∗), 即输入
x, 输出在
f∗的定义域中, 这样我们就能有
D(x)代替
t, 但是这种替换对原来的公式并不是等价的. 因为我们所能用
D(x)找到的
t并不是那个能够让
f最大的那个
t. 所以我们替换之后构造的函数永远要小于等于f-Divergence:
Df(P∣∣Q)≥∫xq(x)(q(x)p(x)D(x)−f∗(D(x)))dx=∫xp(x)D(x)dx−∫xq(x)f∗(D(x))dx
这就相当于我们找到了一个
Df(P∣∣Q)的下界。接下来,如果我们能找到一个让上面公式不等号右边最大的
D, 那么如果我们在公式中采用了这个找到的
D, 那就可以去逼近
Df(P∣∣Q), 即:
Df(P∣∣Q)≈Dmax∫xp(x)D(x)dx−∫xq(x)f∗(D(x))dx=Dmax{Ex∼P[D(x)]−Ex∼Q[f∗(D(x))]}
上面公式的第二行是将前面的概率积分变成了期望. 然而我们在工程上没法真的去求期望, 所以一般的做法就是分别从
P和
Q中去抽样数据.
假设现在我们的
P是
Pdata,
Q是
PG,则公式变成:
Df(Pdata∣∣PG)=DmaxEx∼Pdata[D(x)]−Ex∼PG[f∗(D(x))]
但实际上想要将f-Divergence用在GAN中是不可能的,因为我们并不知道
Pdata和
PG的表达式. 所以我们这一路的公式推导, 最终得到的公式只需要我们简单地从
Pdata和
PG中采样就可以计算得到f-Divergence. 而不再需要知道这两个分布的表达式即可计算.
接下来,假如我们想要去寻找一个能让这个距离最小的
PG,则这个G应该是:
G∗=argGminDf(Pdata∣∣PG)=argGminDmaxEx∼Pdata[D(x)]−Ex∼PG[f∗(D(x))]=argGminDmaxV(G,D)
WGAN
前面我们介绍了使用f-Divergence来将“距离”定义到一个统一框架之中的方法. 而Fenchel Conjugate则将这个f-Divergence与GAN联系在一起。这么做的目的在于, 我们只要能找到一个符合f-Divergence要求的函数,就能产生一个距离的度量, 从而定义一种不同的GAN。
原生GAN的问题
对于原生的GAN来说, 选择特定的度量函数之后, 会导致目标函数变成生成分布与真是分布的JS divergence. 但是这个divergence有很多问题. 比如说一个最严重的问题就是当两个分布之间完全没有重叠时, 分布间距离的大小并不会直接反映在divergence上. 这对基于迭代的优化算法是个致命问题.
根据原始GAN定义的判别器loss, 我们可以得到最优判别器的形式; 而在最优判别器的下, 我们可以把原始GAN定义的生成器loss等价变换为最小化真实分布
Pr与生成分布
Pg之间的JS散度. 我们越训练判别器, 它就越接近最优, 最小化生成器的loss也就会越近似于最小化
Pr和
Pg之间的JS散度.
问题就出在这个JS散度上. 我们会希望如果两个分布之间越接近它们的JS散度越小, 我们通过优化JS散度就能将
Pg“拉向”
Pr, 最终以假乱真. 这个希望在两个分布有所重叠的时候是成立的, 但是如果两个分布完全没有重叠的部分, 或者它们重叠的部分可忽略(下面解释什么叫可忽略), 它们的JS散度是多少呢?
答案是
log2, 因为对于任意一个x只有四种可能:
P1(x)=0且P2(x)=0
P1(x)=0且P2(x)=0
P1(x)=0且P2(x)=0
P1(x)=0且P2(x)=0
第一种对计算JS散度无贡献, 第二种情况由于重叠部分可忽略所以贡献也为0, 第三种情况对公式7右边第一个项的贡献是
log21(P2+0)P2=log2, 第四种情况与之类似, 所以最终
JS(P1∣∣P2)=log2.
换句话说, 无论
Pr跟
Pg是远在天边, 还是近在眼前, 只要它们俩没有一点重叠或者重叠部分可忽略, JS散度就固定是常数
log2, 而这对于梯度下降方法意味着——梯度为0! 此时对于最优判别器来说, 生成器肯定是得不到一丁点梯度信息的; 即使对于接近最优的判别器来说, 生成器也有很大机会面临梯度消失的问题.
但是
Pr与
Pg不重叠或重叠部分可忽略的可能性有多大? 不严谨的答案是: 非常大. 比较严谨的答案是:当
Pr与
Pg的支撑集(support)是高维空间中的低维流形(manifold)时,
Pr与
Pg重叠部分测度(measure) 为0的概率为1.
论文里面针对这个也做了相应的实验:
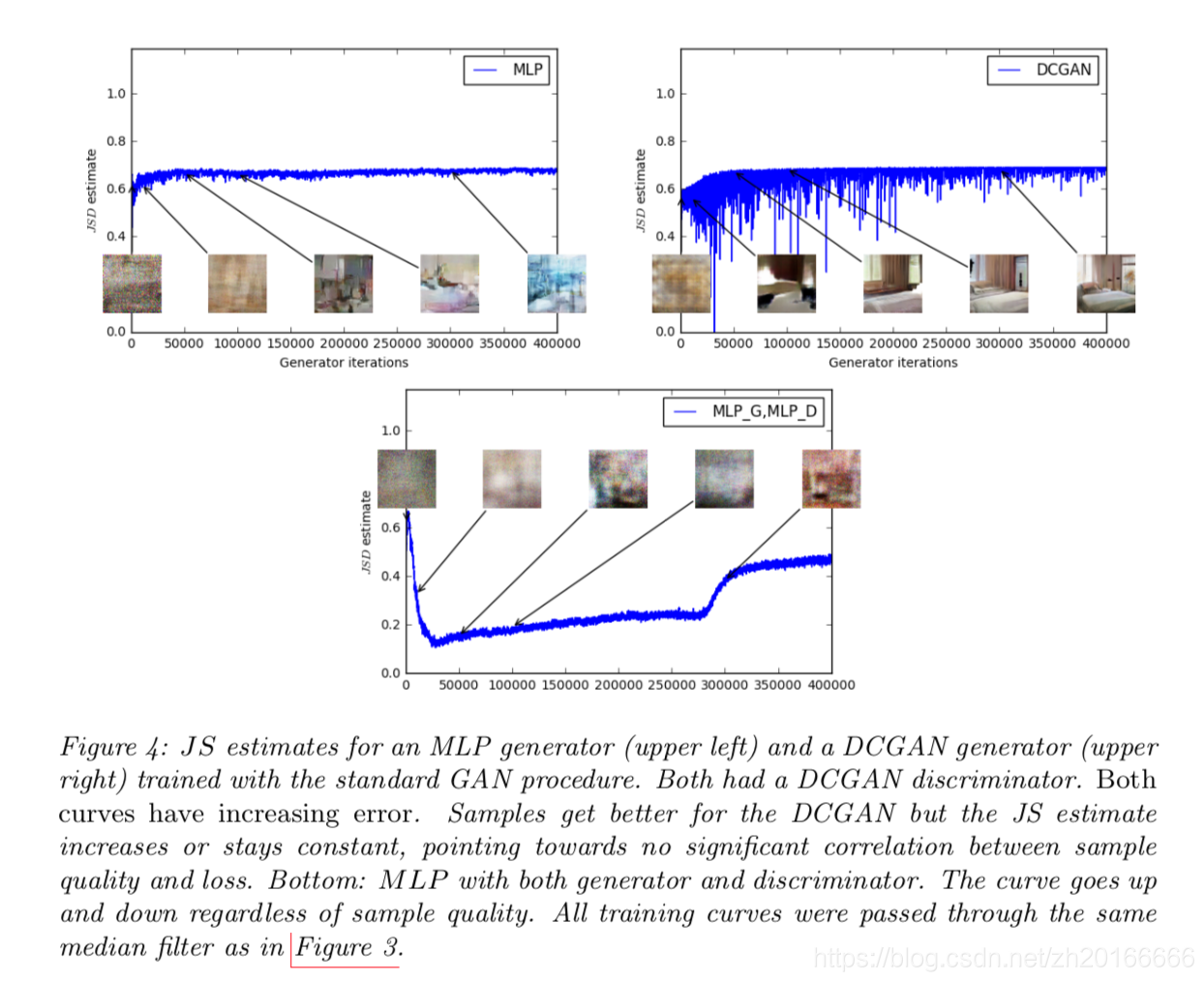
这个图的大致意思是作者用不同的网络结构做了实验, 发现随着迭代次数的增加, 生成图像的质量在提高, 但是真实数据和生成数据之间的JS散度却增加了或者是为一个常数, 这就从实验上验证了原来的GAN利用JS散度来学习的问题.
Earth Mover’s Distance
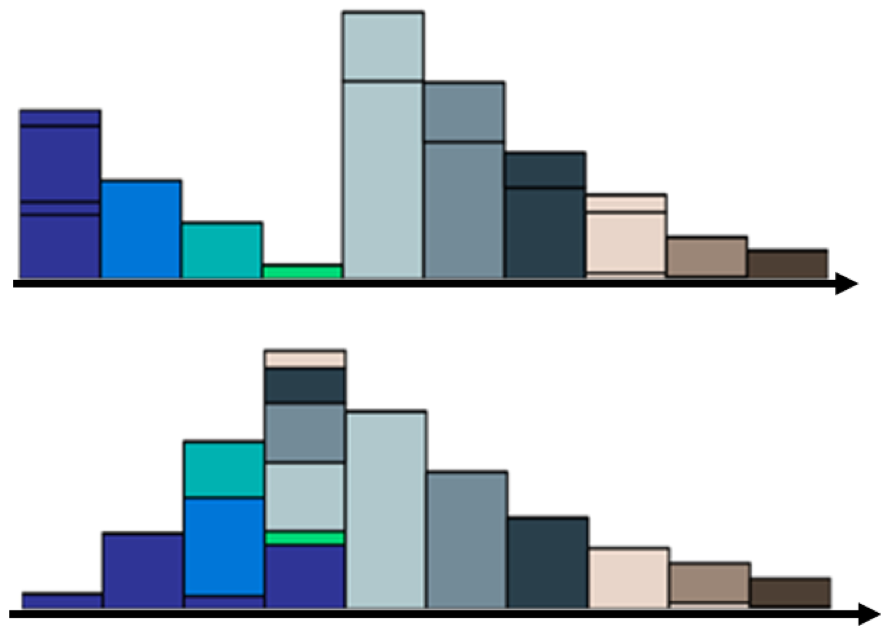
假设我们有下面的两个分布:
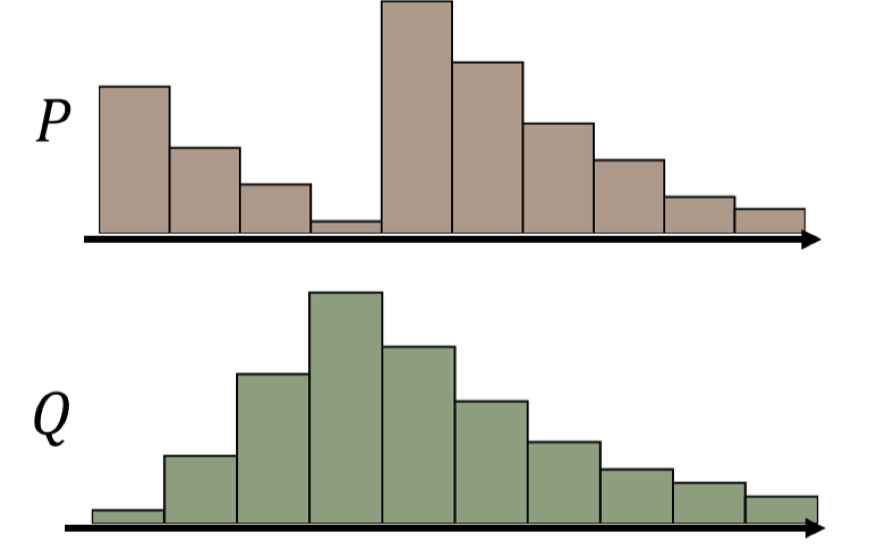
如何将P上的内容“匀一匀”得到Q呢? 比如说把最高的哪一条分开一部分分到其他地方? 这或许是一种解决方案:
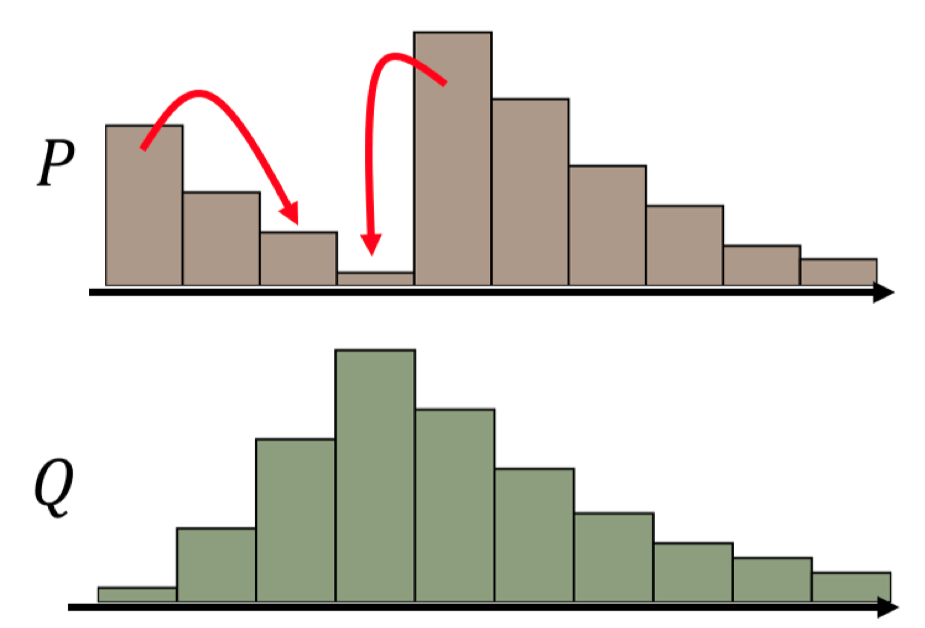
但是显然除此之外还有很多种方法, 例如:
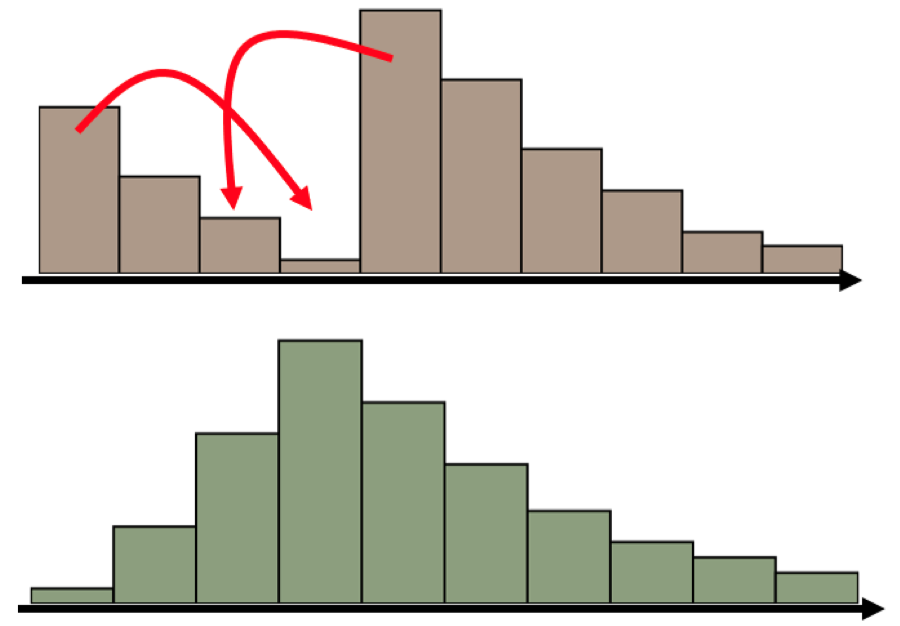
既然移动的方法有很多种, 如果每一种都表示了一种代价, 那么显然有“好”方法, 就会有“坏”方法. 假设我们衡量移动方法好坏的总代价是“移动的数量”X“移动的距离”. 那这两个移动的方案肯定是能分出优劣的.当我们用分布Q上不同颜色的色块对应分布P的相应位置, 就可以将最好的移动方案画成下面这个样子:
我们可以将这个变化画成一个矩阵:
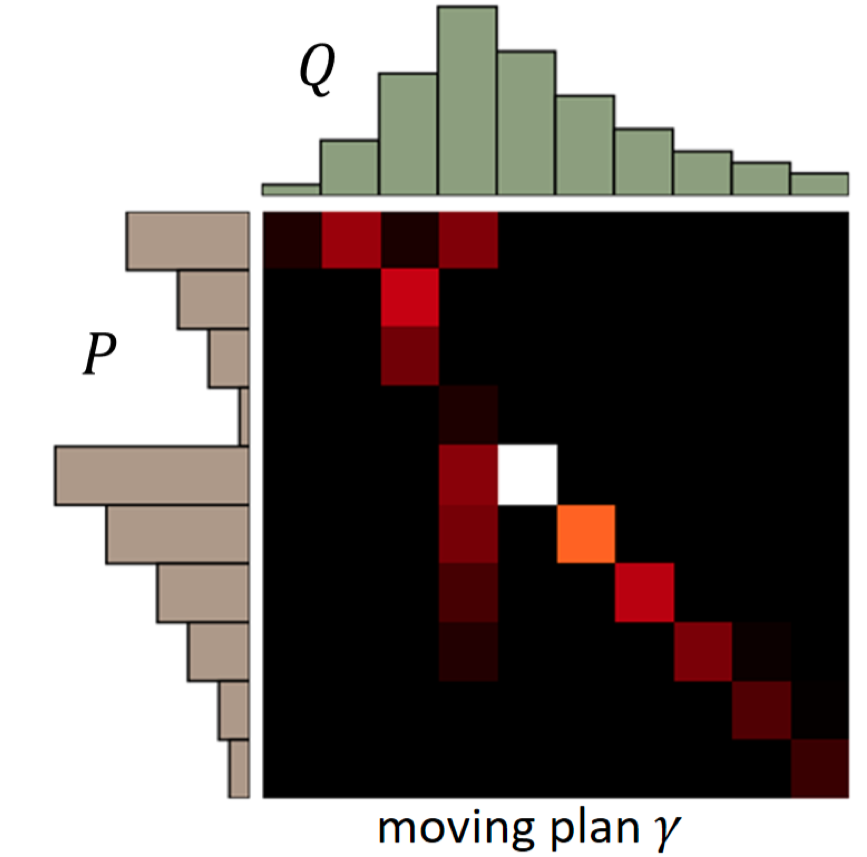
对于每一个移动方案
γ, 都能有这样一个矩阵. 矩阵的每一行表示分布
P的一个特定位置. 该行中的每一列表示需要将该行的内容移动到分布
Q对应位置的数量. 即矩阵中的一个元素
(xp,xq)表示从
P(xp)移动到
Q(xq)的数量。
而对于方案
γ我们可以定义一个平均移动距离(Average distance of a plan
γ):
B(γ)=xp,xq∑γ(xp,xq)∣∣xp−xq∣∣
而Earth Mover’s Distance就是指所有方案中平均移动距离最小的那个方案:
W(P,Q)=γ∈ΠminB(γ)
其中
Π是所有可能的方案.
作者在论文中也通过实验说明了EM距离比JS散度更能反应连个分布间的距离:

上面两幅图说明在训练过程中, 随着EM距离的减小, 生成图片的质量越来越高; 而下面这幅图b表示EM距离为一个常数, 生成的图片也就很差.
EM距离与GAN结合
回忆一下f-Divergence:
Df(Pdata∣∣PG)=DmaxEx∼Pdata[D(x)]−Ex∼PG[f∗(D(x))]
而WGAN的文章中写到,EM距离也可以类似f-Divergence,用一个式子表示出来:
W(Pdata,PG)=D∈1−LipschitzmaxEx∼Pdata[D(x)]−Ex∼PG[D(x)]
公式中1-Lipschitz表示了一个函数集. 当
f是一个Lipschitz函数时,它应该受到以下约束:
∣∣f(x1)−f(x2)∣∣≤K∣∣x1−x2∣∣
当K=1时,这个函数就是1-Lipschitz函数。
为什么要限制生成器D时1-Lipschitz函数呢
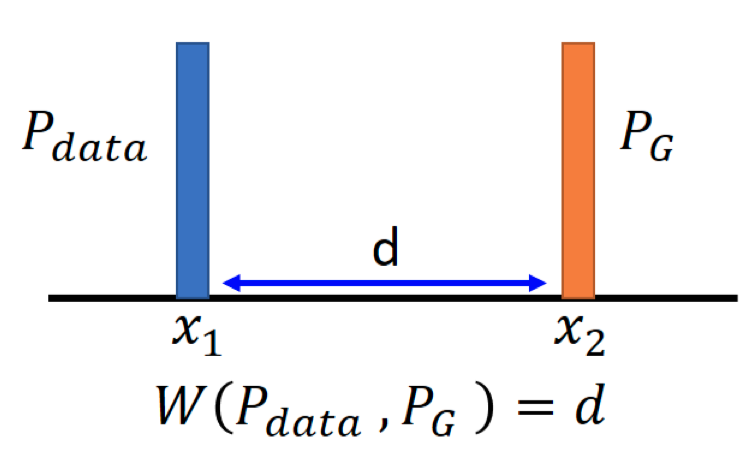
假设我们现在有两个一维的分布,
x1和
x2的距离是
d, 显然他们之间的EM距离也是
d:
此时如果我们想要去优化
W(Pdata,PG)=D∈1−Lipschitzmax{Ex∼Pdata[D(x)]−Ex∼PG[D(x)]
只需要让
D(x1)=+∞,而让
D(x2)=−∞就可以了. 也就是说,如果不加上1-Lipschitz的限制的话, 只需要让判别器判断
Pdata时大小是正无穷, 判断PG时是负无穷就足够了. 这样的判别器可能会导致训练起来非常困难: 判别器区分能力太强, 很难驱使生成器让生成分布适应数据分布.
这个时候我们加上了这个限制, 也就是说
∣∣D(x1)−D(x2)∣∣≤∣∣x1−x2∣∣=d. 此时如果我们想要满足上面的优化目标的话, 就可以让
D(x1)=k+d, 让
D(x2)=k. 其中
k具体是什么无所谓, 关键是我们通过
d将判别器在不同分布上的结果限制在了一个较小的范围中. 传统的GAN所使用的判别器是一个最终经过sigmoid输出的神经网络, 它的输出曲线肯定是一个S型. 在真实分布附近是1, 在生成分布附近是0. 而现在我们对判别器施加了这个限制, 同时不再在最后一层使用sigmoid, 它有可能是任何形状的线段, 只要能让
D(x1)−D(x2)≤d即可. 如下图所示:
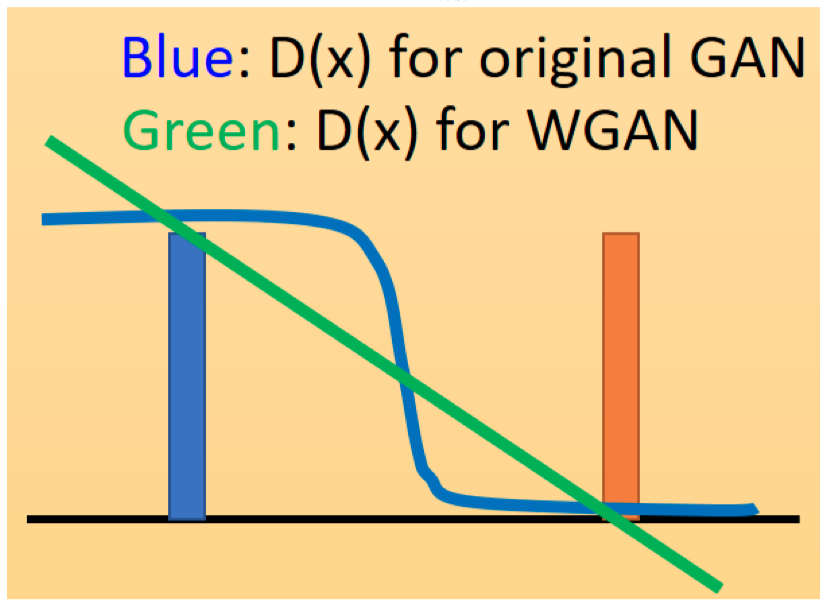
这样做的好处显而易见. 传统GAN的判别器是有饱和区的, 而现在的GAN如果是一条直线, 那就能在训练过程中无差别地提供一个有意义的梯度.说了这么多, WGAN主要的变化在这两点:
- 不要用sigmoid输出;
- 换成受限的1-Lipschitz来实现一个类似sigmoid的“范围限制”功能.
1-Lipschitz限制应该如何施加?
文章中所用的方法是截断权重.
WGAN的伪代码如下:
- 初始化D的
θd和G的
θg
- 在每一个训练循环进行:
- 从数据分布
Pdata(x)中采样m个样本
{x1,x2,…,xm}
- 从先验噪声分布
Pprior(z)中采样m个样本
{z1,z2,…,zm}
- 将这些噪声样本输入生成器G,得到生成样本
{x~1,x~2,…,x~m},x~i=G(zi)
- 更新判别器的参数θd,即最大化:
-
V~=m1∑i=1mD(xi)−m1∑i=1mD(x~i)
-
θd←θd+η∇V~(θd)
- 更新参数后,截断参数
- 从先验噪声分布
Pprior(z)中再采样m个样本
{z1,z2,…,zm}
- 更新生成器的参数θg,即最小化:
-
V~=m1∑i=1mlogD(xi)−m1∑i=1mD(G(zi))
-
θg←θg−η∇V~(θg)
尤其需要注意的是, 判别器的输出不再需用sigmoid函数了! 并且需要训练k次判别器, 然后只训练一次生成器.
Gradient Penalty
WGA中试通过权重裁剪来施加1-Lipschitz限制的, 但是做样做会有一些问题, 比如通过权重裁剪并不能保证判别器满足1-Lipschitz限制, 而是K-Lipschitz限制, 而且权重裁剪很可能讲那些满足1-Lipschitz限制的函数给剪掉. 而WGAN GP提出了通过施加梯度惩罚来施加1-Lipschitz限制的条件.
Improved WGAN 的文章中提到, 1-Lipschitz函数有一个特性: 一个可微函数是1-Lipschitz函数时, 当且仅当它的梯度的norm将永远小于等于1, 即:
D∈1−Lipschitz⇔∣∣∇xD(x)∣∣≤1for all x
有了这个理论, 我们就可以改变我们的目标函数了.
原来我们优化目标是:
W(Pdata,PG)=D∈1−Lipschitzmax{Ex∼Pdata[D(x)]−Ex∼PG[D(x)]}
此时WGAN的优化目标是在1-Lipschitz中挑一个函数作为判别器D.
而Improved WGAN则是这样:
W(Pdata,PG)=Dmax{Ex∼Pdata[D(x)]−Ex∼PG[D(x)]−λ∫xmax(0,∣∣∇xD(x)∣∣−1)dx}
也就是说, 现在我们寻找判别器的函数集不再是1-Lipschitz中的函数了, 而是任意函数. 但是后面增加了一项惩罚项. 这个惩罚项就能够让选中的判别器函数倾向于是一个“对输入梯度为1的函数”. 这样也能实现类似weight clipping的效果. 但与之前遇到的问题一样, 积分在实现的时候无法计算, 所以我们用采样的方法去计算这个惩罚项, 即:
W(Pdata,PG)=Dmax{Ex∼Pdata[D(x)]−Ex∼PG[D(x)]−λEx∼Ppenalty[max(0,∣∣∇xD(x)∣∣−1)]}
也就是说, 在训练过程中, 我们更倾向于得到一个判别器D, 它能对从
Ppenalty中采样得到的每一个
x都能
∣∣∇xD(x)∣∣≤1,. 涉及到采样, 那就要关系到如何采样. 而首先是从哪里采? 即
Ppenalty是什么?
Improved WGAN设计了一个特别的
Ppenalty. 它的产生过程如下:
- 从Pdata中采样一个点
- 从PG中采样一个点
- 将这两个点连线
- 在连线之上在采样得到一个点,就是一个从
Ppenalty采样的一个点.
重复上面的过程就能不断采样得到
x∼Ppenalty。最终得到下图中的蓝色区域就可以看作是
Ppenalty:
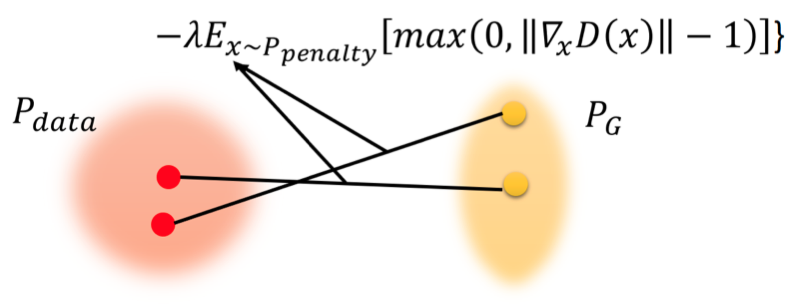
也就是说, 我们采样的范围不是整个
x, 只是P_G和P_{data}中间的空间中的一部分.
再更进一步, Improved WGAN真正做的事是这样:
W(Pdata,PG)=Dmax{Ex∼Pdata[D(x)]−Ex∼PG[D(x)]−λEx∼Ppenalty[(∣∣∇xD(x)∣∣−1)2]}
这个惩罚项的目的是让梯度尽可能趋向于等于1. 即当梯度大于1或小于1时都会受到惩罚. 而原来的惩罚项仅仅在梯度大于1时受到惩罚而已. 这样做是有好处的, 就像我们在SVM中强调最大类间距离一样, 虽然有多个可以将数据区分开的分类面, 但我们希望找到不但能区分数据, 还能让区分距离最大的那个分类面. 这里这样做的目的是由于可能存在多个判别器, 我们想要找到的那个判别器应该有一个“最好的形状”. 一个“好”的判别器应该在
Pdata附近是尽可能大, 要在
PG附近尽可能小. 也就是说处于
Pdata和
PG之间的
Ppenalty区域应该有一个比较“陡峭”的梯度. 但是这个陡峭程度是有限制的, 这个限制就是1.
