这里使用的数据集仍然是CIFAR-10,由于之前写过一篇使用AlexNet对CIFAR数据集进行分类的文章,已经详细介绍了这个数据集,当时我们是直接把这些图片的数据文件下载下来,然后使用pickle进行反序列化获取数据的,具体内容可以参考这里:第十六节,卷积神经网络之AlexNet网络实现(六)
与MNIST类似,TensorFlow中也有一个下载和导入CIFAR数据集的代码文件,不同的是,自从TensorFlow1.0之后,将里面的Models模块分离了出来,分离和导入CIFAR数据集的代码在models中,所以要先去TensorFlow的GitHub网站将其下载下来。点击下载地址开始下载。

一 描述
在该例子中,使用了全局平均池化层来代替传统的全连接层,使用了3个卷积层的同卷积网络,滤波器为5x5,每个卷积层后面跟有一个步长2x2的池化层,滤波器大小为2x2,最后一个池化层为全局平均池化层,输出后为batch_sizex1x1x10,我们对齐进行形状变换为batch_sizex10,得到10个特征,再对这10个特征进行softmax计算,其结果代表最终分类。
二 导入数据集
''' 一 引入数据集 ''' batch_size = 128 learning_rate = 1e-4 training_step = 15000 display_step = 200 #数据集目录 data_dir = './cifar10_data/cifar-10-batches-bin' print('begin') #获取训练集数据 images_train,labels_train = cifar10_input.inputs(eval_data=False,data_dir = data_dir,batch_size=batch_size) print('begin data')
注意这里调用了cifar10_input.inputs()函数,这个函数是专门获取数据的函数,返回数据集合对应的标签,但是这个函数会将图片裁切好,由原来的32x32x3变成24x24x3,该函数默认使用测试数据集,如果使用训练数据集,可以将第一个参数传入eval_data=False。另外再将batch_size和dir传入,就可以得到dir下面的batch_size个数据了。我们可以查看一下这个函数的实现:
def inputs(eval_data, data_dir, batch_size): """Construct input for CIFAR evaluation using the Reader ops. Args: eval_data: bool, indicating if one should use the train or eval data set. data_dir: Path to the CIFAR-10 data directory. batch_size: Number of images per batch. Returns: images: Images. 4D tensor of [batch_size, IMAGE_SIZE, IMAGE_SIZE, 3] size. labels: Labels. 1D tensor of [batch_size] size. """ if not eval_data: filenames = [os.path.join(data_dir, 'data_batch_%d.bin' % i) for i in xrange(1, 6)] num_examples_per_epoch = NUM_EXAMPLES_PER_EPOCH_FOR_TRAIN else: filenames = [os.path.join(data_dir, 'test_batch.bin')] num_examples_per_epoch = NUM_EXAMPLES_PER_EPOCH_FOR_EVAL for f in filenames: if not tf.gfile.Exists(f): raise ValueError('Failed to find file: ' + f) with tf.name_scope('input'): # Create a queue that produces the filenames to read. filename_queue = tf.train.string_input_producer(filenames) # Read examples from files in the filename queue. read_input = read_cifar10(filename_queue) reshaped_image = tf.cast(read_input.uint8image, tf.float32) height = IMAGE_SIZE width = IMAGE_SIZE # Image processing for evaluation. # Crop the central [height, width] of the image. resized_image = tf.image.resize_image_with_crop_or_pad(reshaped_image, height, width) # Subtract off the mean and divide by the variance of the pixels. float_image = tf.image.per_image_standardization(resized_image) # Set the shapes of tensors. float_image.set_shape([height, width, 3]) read_input.label.set_shape([1]) # Ensure that the random shuffling has good mixing properties. min_fraction_of_examples_in_queue = 0.4 min_queue_examples = int(num_examples_per_epoch * min_fraction_of_examples_in_queue) # Generate a batch of images and labels by building up a queue of examples. return _generate_image_and_label_batch(float_image, read_input.label, min_queue_examples, batch_size, shuffle=False)
这个函数主要包含以下几步:
- 读取测试集文件名或者训练集文件名,并创建文件名队列。
- 使用文件读取器读取一张图像的数据和标签,并返回一个存放这些张量数据的类对象。
- 对图像进行裁切处理。
- 归一化输入。
- 读取batch_size个图像。(返回的是一个张量,必须要在会话中执行才能得到数据)
三 定义网络结构
''' 二 定义网络结构 ''' def weight_variable(shape): ''' 初始化权重 args: shape:权重shape ''' initial = tf.truncated_normal(shape=shape,mean=0.0,stddev=0.1) return tf.Variable(initial) def bias_variable(shape): ''' 初始化偏置 args: shape:偏置shape ''' initial =tf.constant(0.1,shape=shape) return tf.Variable(initial) def conv2d(x,W): ''' 卷积运算 ,使用SAME填充方式 池化层后 out_height = in_hight / strides_height(向上取整) out_width = in_width / strides_width(向上取整) args: x:输入图像 形状为[batch,in_height,in_width,in_channels] W:权重 形状为[filter_height,filter_width,in_channels,out_channels] ''' return tf.nn.conv2d(x,W,strides=[1,1,1,1],padding='SAME') def max_pool_2x2(x): ''' 最大池化层,滤波器大小为2x2,'SAME'填充方式 池化层后 out_height = in_hight / strides_height(向上取整) out_width = in_width / strides_width(向上取整) args: x:输入图像 形状为[batch,in_height,in_width,in_channels] ''' return tf.nn.max_pool(x,ksize=[1,2,2,1],strides=[1,2,2,1],padding='SAME') def avg_pool_6x6(x): ''' 全局平均池化层,使用一个与原有输入同样尺寸的filter进行池化,'SAME'填充方式 池化层后 out_height = in_hight / strides_height(向上取整) out_width = in_width / strides_width(向上取整) args; x:输入图像 形状为[batch,in_height,in_width,in_channels] ''' return tf.nn.avg_pool(x,ksize=[1,6,6,1],strides=[1,6,6,1],padding='SAME') def print_op_shape(t): ''' 输出一个操作op节点的形状 ''' print(t.op.name,'',t.get_shape().as_list()) #定义占位符 input_x = tf.placeholder(dtype=tf.float32,shape=[None,24,24,3]) #图像大小24x24x input_y = tf.placeholder(dtype=tf.float32,shape=[None,10]) #0-9类别 x_image = tf.reshape(input_x,[-1,24,24,3]) #1.卷积层 ->池化层 W_conv1 = weight_variable([5,5,3,64]) b_conv1 = bias_variable([64]) h_conv1 = tf.nn.relu(conv2d(x_image,W_conv1) + b_conv1) #输出为[-1,24,24,64] print_op_shape(h_conv1) h_pool1 = max_pool_2x2(h_conv1) #输出为[-1,12,12,64] print_op_shape(h_pool1) #2.卷积层 ->池化层 W_conv2 = weight_variable([5,5,64,64]) b_conv2 = bias_variable([64]) h_conv2 = tf.nn.relu(conv2d(h_pool1,W_conv2) + b_conv2) #输出为[-1,12,12,64] print_op_shape(h_conv2) h_pool2 = max_pool_2x2(h_conv2) #输出为[-1,6,6,64] print_op_shape(h_pool2) #3.卷积层 ->全局平均池化层 W_conv3 = weight_variable([5,5,64,10]) b_conv3 = bias_variable([10]) h_conv3 = tf.nn.relu(conv2d(h_pool2,W_conv3) + b_conv3) #输出为[-1,6,6,10] print_op_shape(h_conv3) nt_hpool3 = avg_pool_6x6(h_conv3) #输出为[-1,1,1,10] print_op_shape(nt_hpool3) nt_hpool3_flat = tf.reshape(nt_hpool3,[-1,10]) y_conv = tf.nn.softmax(nt_hpool3_flat)
四 定义求解器
''' 三 定义求解器 ''' #softmax交叉熵代价函数 cost = tf.reduce_mean(-tf.reduce_sum(input_y * tf.log(y_conv),axis=1)) #求解器 train = tf.train.AdamOptimizer(learning_rate).minimize(cost) #返回一个准确度的数据 correct_prediction = tf.equal(tf.arg_max(y_conv,1),tf.arg_max(input_y,1)) #准确率 accuracy = tf.reduce_mean(tf.cast(correct_prediction,dtype=tf.float32))
五 开始测试
''' 四 开始训练 ''' sess = tf.Session(); sess.run(tf.global_variables_initializer()) tf.train.start_queue_runners(sess=sess) for step in range(training_step): image_batch,label_batch = sess.run([images_train,labels_train]) label_b = np.eye(10,dtype=np.float32)[label_batch] train.run(feed_dict={input_x:image_batch,input_y:label_b},session=sess) if step % display_step == 0: train_accuracy = accuracy.eval(feed_dict={input_x:image_batch,input_y:label_b},session=sess) print('Step {0} tranining accuracy {1}'.format(step,train_accuracy))
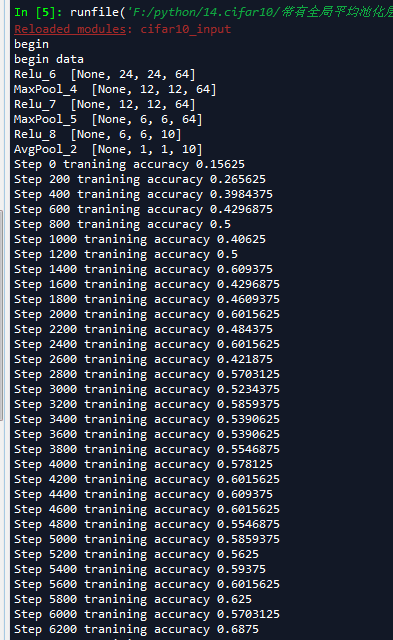
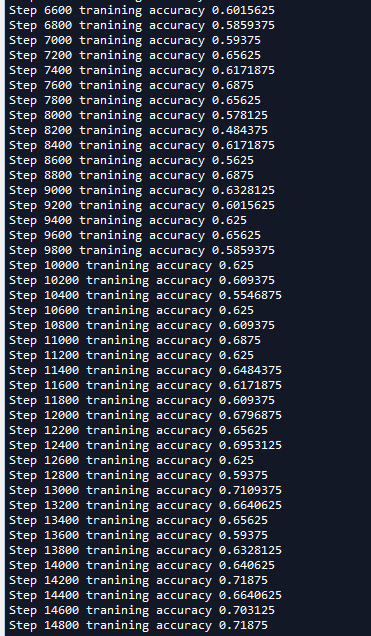
我们可以看到这个模型准确率接近70%,这个比我们在第十六节,卷积神经网络之AlexNet网络实现(六)文章中使用传统神经网络训练准确度52%要提高了不少。并且比AlexNet的60%高了一些(AlexNet我迭代的轮数比较少,太因为耗时)。