边缘/轮廓检测
Canny边缘检测
Canny边缘检测原理
Canny边缘检测的一般步骤
- step1:去噪
- 边缘检测容易受到噪声的影响。因此,在进行边缘检测前,通常需要先进行去噪
- 通常采用高斯滤波器去除噪声
- step2:梯度
- 对平滑后的图像采用sobel算子计算梯度和方向
- 梯度的方向一般总是与边界垂直
- 梯度方向被归为四类:垂直、水平、两个对角线
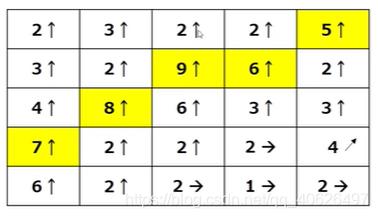
- step3:非极大值抑制
- 在获得了梯度和方向后,遍历图像,去除所有不是边界的点
- 实现方法:逐个遍历像素点,判断当前像素点是否是周围像素点中具有相同方向梯度的最大值;若是,保留该点;否则,抑制(归零)
- 例子:下图黄色背景的值被保留,其余点被抑制(处理为0)
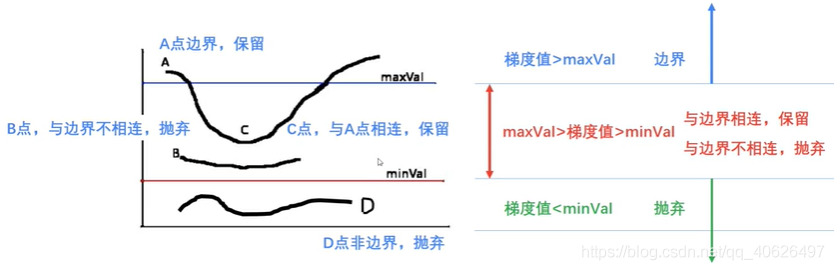
- step4:滞后阈值
- 两个值:
minVal:滞后阈值1;maxVal:滞后阈值2 - 阈值越大,信息越少
- 例子:
- 两个值:
Canny函数及使用
edges = cv2.Canny(image, threshold1, threshold2)
edges:边界图像image:原始图像threshold1:阈值1(minVal)threshold2:阈值2(maxVal)
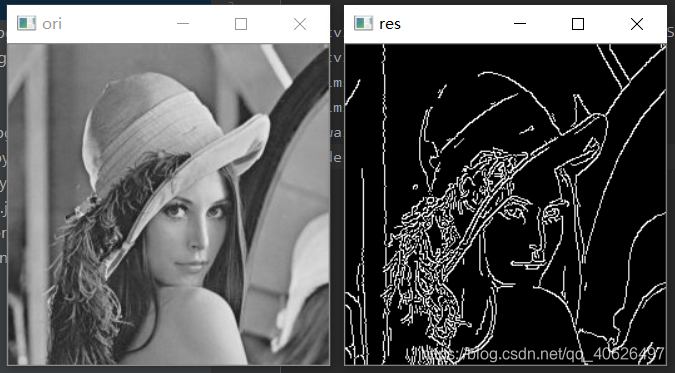
操作小记
import cv2
o = cv2.imread("lena.jpg", cv2.IMREAD_GRAYSCALE)
r = cv2.Canny(o, 100, 200)
cv2.imshow("ori", o)
cv2.imshow("res", r)
cv2.waitKey()
cv2.destroyAllWindows()
效果
轮廓查找和绘制
图像轮廓
轮廓定义
- 边缘检测能够测出边缘,但是边缘是不连续的
- 将边缘连接为一个整体,构成轮廓
注意问题
- 对象是二值图像。所以需要预先进行阈值分割或者边缘检测处理
- 查找轮廓需要更改原始图像。因此,通常使用原始图像的一份拷贝操作
- 在OpenCV中,是从黑色背景中查找白色对象。因此,对象必须是白色的,背景必须是黑色的
使用函数
cv2.findContours():查找图像轮廓的函数contours, hierarchy = cv2.findContours(image, mode, method)contours:轮廓hierarchy:图像的拓扑信息(轮廓层次)image:原始图像mode:轮廓检索模式cv2.RETR_EXTERNAL:表示只检测外轮廓cv2.RETR_LIST:检测的轮廓不建立等级关系cv2.RETR_CCOMP:建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层cv2.RETR_TREE:建立一个等级树结构的轮廓
method:轮廓的近似方法cv2.CHAIN_APPROX_NONE:存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2), abs(y2-y1)) == 1cv2.CHAIN_APPROX_SIMPLE:压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息cv2.CHAIN_APPROX_TC89_L1:使用teh-Chinl chain 近似算法cv2.CHAIN_APPROX_TC89_KCOS:使用teh-Chinl chain 近似算法
cv2.drawContours():将查找的轮廓绘制到图像上r = cv2.drawContours(o, contours, contourldx, color[, thickness])r:目标图像,直接修改目标的像素点,实现绘制o:原始图像contours:需要绘制的边缘数组contourldx:需要绘制的边缘索引,如果全部绘制则为 -1color:绘制的颜色,为BGR格式的Scalarthickness:可选,绘制的密度,即描述轮廓时所用的画笔粗细
注意:若是采用这个格式img, contours, hierarchy = cv2.findContours(image, mode, method)会报下面错误,原因是opencv的方法改掉了,findCountours方法被修改为只返回coutours和hierarchy
Traceback (most recent call last):
File "D:/data/Code/PycharmProjects/helloworld/test.py", line 7, in <module>
img, contours, hierarchy = cv2.findContours(binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
ValueError: not enough values to unpack (expected 3, got 2)
Process finished with exit code 1
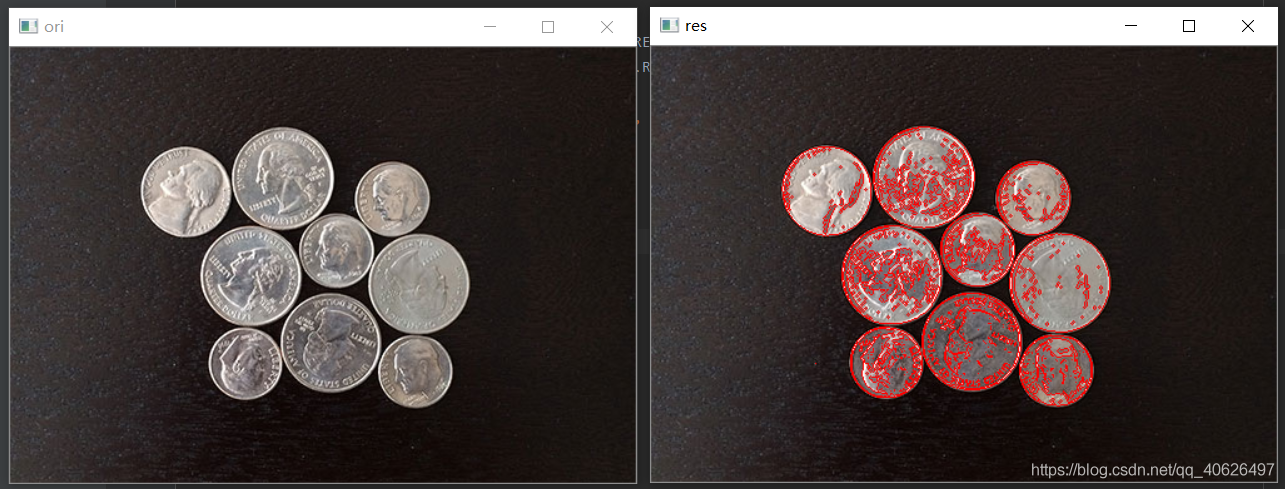
操作小记
import cv2
o = cv2.imread("money.png")
gray = cv2.cvtColor(o, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
co = o.copy()
r = cv2.drawContours(co, contours, -1, (0, 0, 255), 1)
cv2.imshow("ori", o)
cv2.imshow("res", r)
cv2.waitKey()
cv2.destroyAllWindows()
效果
Hough轮廓检测
Hough-直线检测
霍夫直线变换介绍
- Hough Line Transform用来做直线检测
- 前提条件:边缘检测已经完成
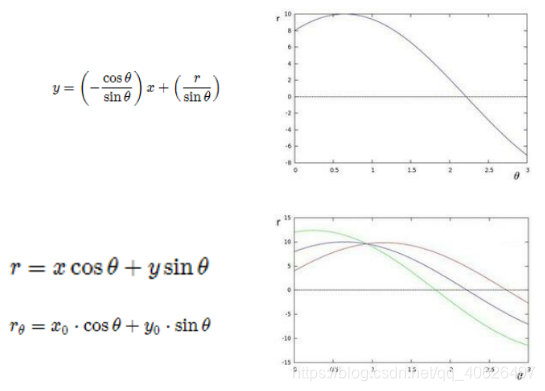
- 平面空间到极坐标空间转换
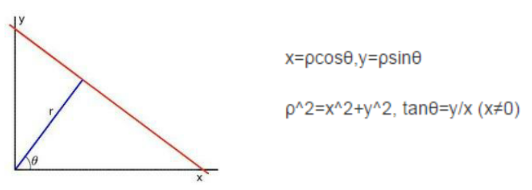
- 具体
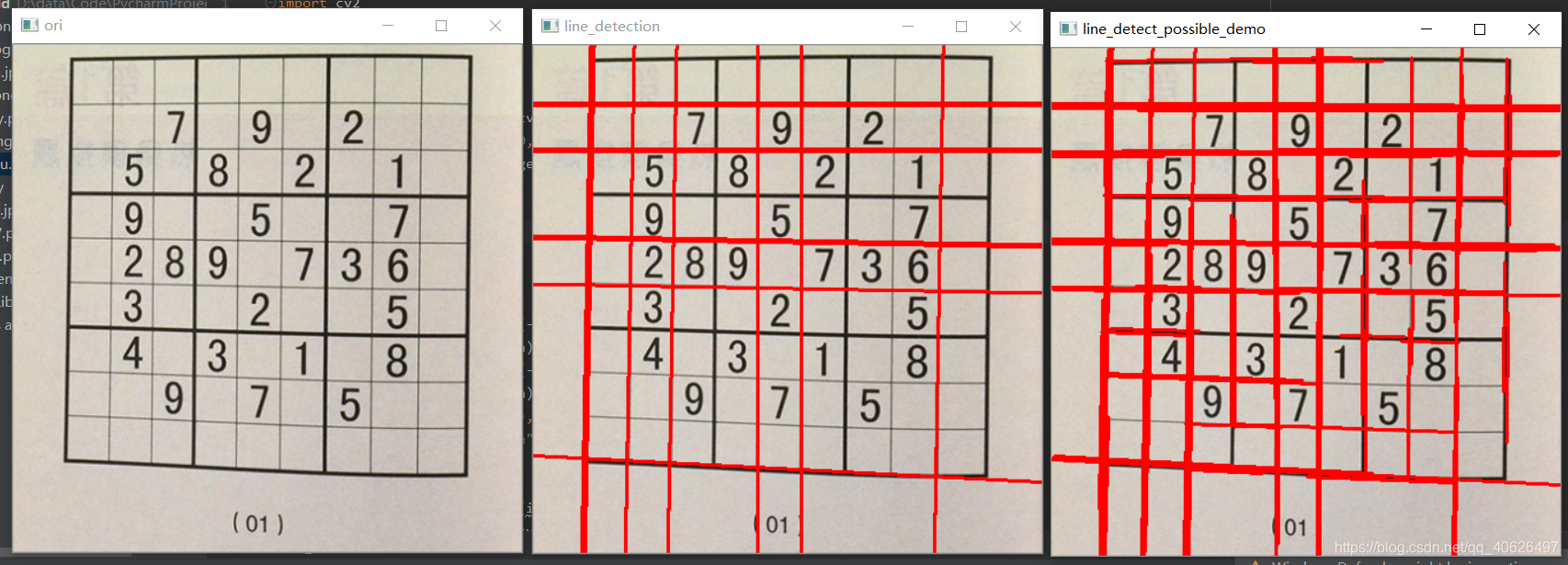
操作小记
import cv2
import numpy as np
def line_detection(img):
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray, 50, 150, apertureSize=3)
lines = cv2.HoughLines(edges, 1, np.pi / 180, 200)
for line in lines:
rho, theta = line[0]
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
x1 = int(x0 + 1000 * (-b))
y1 = int(y0 + 1000 * a)
x2 = int(x0 - 1000 * (-b))
y2 = int(y0 - 1000 * a)
cv2.line(img, (x1, y1), (x2, y2), (0, 0, 255), 2)
cv2.imshow("line_detection", img)
def line_detect_possible_demo(img):
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray, 50, 150, apertureSize=3)
lines = cv2.HoughLinesP(edges, 1, np.pi / 180, 100, minLineLength=50, maxLineGap=10)
for line in lines:
x1, y1, x2, y2 = line[0]
cv2.line(img, (x1, y1), (x2, y2), (0, 0, 255), 2)
cv2.imshow("line_detect_possible_demo", img)
img = cv2.imread("Sudoku.png")
cv2.imshow("ori", img)
line_detection(img)
line_detect_possible_demo(img)
cv2.waitKey()
效果
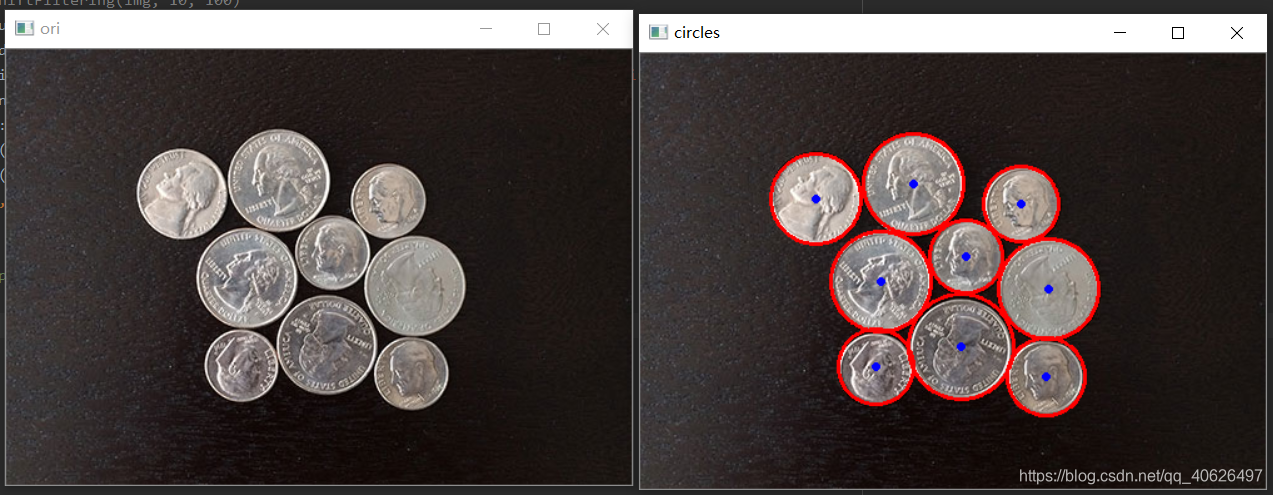
Hough-圆检测
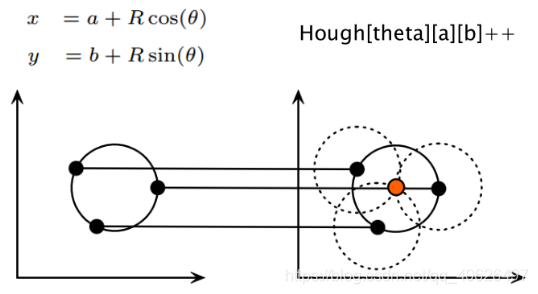
霍夫圆检测原理
- 从平面坐标到极坐标转换三个参数C(x0, y0, r)其中x0, y0是圆心
- 假设平面坐标的任意一个圆上的点,转换到极坐标中:C(x0, y0, r) 处有最大值,霍夫变换正是利用这个原理实现圆检测
现实考量
- 因为霍夫圆检测对噪声比较敏感,所以首先要对图像做中值滤波
- 基于效率考虑,OpenCV中实现的霍夫变换圆检测是基于图像梯度的实现,分为两步:
- 检测边缘,发现可能的圆心
- 基于第一步的基础上从候选圆心开始计算最佳半径大小
操作小记
import cv2
import numpy as np
def detect_circles_demo(img):
dst = cv2.pyrMeanShiftFiltering(img, 10, 100)
cimg = cv2.cvtColor(dst, cv2.COLOR_BGR2GRAY)
circles = cv2.HoughCircles(cimg, cv2.HOUGH_GRADIENT, 1, 20, param1=50, param2=30, minRadius=0, maxRadius=0)
circles = np.uint16(np.around(circles))
for i in circles[0, :]:
cv2.circle(img, (i[0], i[1]), i[2], (0, 0, 255), 2)
cv2.circle(img, (i[0], i[1]), 2, (255, 0, 0), 2)
cv2.imshow("circles", img)
img = cv2.imread("money.png")
cv2.imshow("ori", img)
detect_circles_demo(img)
cv2.waitKey(0)
cv2.destroyAllWindows()
效果
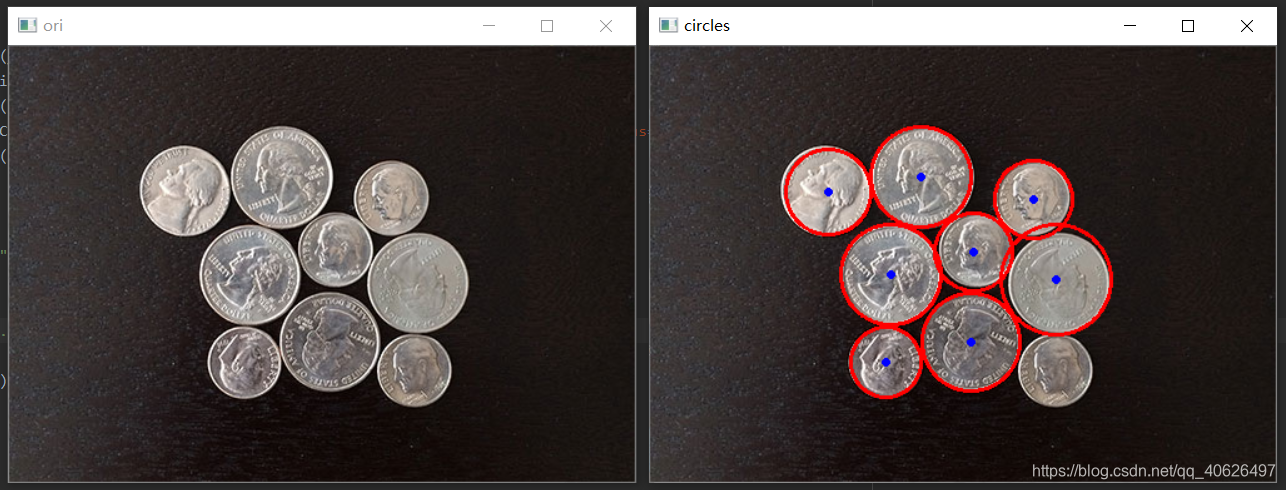
若采用dst = cv2.GaussianBlur(img, (23, 23), 0, 0)来过滤,效果会更好